 Když se řekne průmyslový nebo pracovní robot, obvykle se lidem vybaví nějaká forma robotického ramene, která u montážní linky provádí nějaké výrobní operace, přičemž stojí pevně upevněna na podstavci. Případně si vybaví i nějaký typ autonomního přepravního stroje AMR, který zase jen jezdí po hale či chodbách a převáží nějaké komponenty, materiál či výrobky. V některých oblastech by se však hodily více komplexní roboti, tak nějak svým pohybem se více podobající lidem či jiným chodícím živočichům. Ty jsou nejen sami pohyblivý, ale umí již i překonávat snadno různé překážky, které jim stojí v cestě. Šlo by je tak flexibilně okamžitě nasadit na práci i tam, kde není žádná doplňující infrastruktura v podobě automatických dopravníků a navíc i ještě nerovná plocha/podlaha se schody a různými povrchy. Zvláště schody nebo i velmi nakloněné plochy jsou zatím pro robotické systémy problematické, což limituje nasazení pohybujících se pojezdových robotů.
Když se řekne průmyslový nebo pracovní robot, obvykle se lidem vybaví nějaká forma robotického ramene, která u montážní linky provádí nějaké výrobní operace, přičemž stojí pevně upevněna na podstavci. Případně si vybaví i nějaký typ autonomního přepravního stroje AMR, který zase jen jezdí po hale či chodbách a převáží nějaké komponenty, materiál či výrobky. V některých oblastech by se však hodily více komplexní roboti, tak nějak svým pohybem se více podobající lidem či jiným chodícím živočichům. Ty jsou nejen sami pohyblivý, ale umí již i překonávat snadno různé překážky, které jim stojí v cestě. Šlo by je tak flexibilně okamžitě nasadit na práci i tam, kde není žádná doplňující infrastruktura v podobě automatických dopravníků a navíc i ještě nerovná plocha/podlaha se schody a různými povrchy. Zvláště schody nebo i velmi nakloněné plochy jsou zatím pro robotické systémy problematické, což limituje nasazení pohybujících se pojezdových robotů.
I když robotický koncept typu chodícího zvířete nebo člověka je náročný na sestrojení a tedy i drahý, tak z pohledu překonávání překážek je velmi flexibilní. To taky jasně dokazuje evoluce živočichů, kteří by jinak nohy neměli, kdy by to nebyla nejvíce flexibilní varianta pohybu. Ukažme si několik zajímavých již sestrojených návrhů chodících robotů vhodných pro různé oblasti činností.
Komplexní robot pro přesun a skládání krabic
 Velmi zajímavého komplexního robota pro paletizaci, depaletizaci či přesun krabic ve skladech navrhla společnost Boston Dynamics pod označením "Handle". Ano, paletizace či depaletizace robotickým ramenem se již dnes poměrně běžně provádí, ale často je nevýhoda tohoto konceptu prostě napevno do podlahy připevněná podstava robotického ramene, ke kterému se nejdříve musí palety a přesouvané produkty dopravovat na nějakých pevných dopravnících. Velké množství dopravníků pak přemění jinak dosud volně průchozí či průjezdnou halu na velkou spleť různě se křížících konstrukcí, dost často pak pro lidskou obsluhu špatně přístupných.
Velmi zajímavého komplexního robota pro paletizaci, depaletizaci či přesun krabic ve skladech navrhla společnost Boston Dynamics pod označením "Handle". Ano, paletizace či depaletizace robotickým ramenem se již dnes poměrně běžně provádí, ale často je nevýhoda tohoto konceptu prostě napevno do podlahy připevněná podstava robotického ramene, ke kterému se nejdříve musí palety a přesouvané produkty dopravovat na nějakých pevných dopravnících. Velké množství dopravníků pak přemění jinak dosud volně průchozí či průjezdnou halu na velkou spleť různě se křížících konstrukcí, dost často pak pro lidskou obsluhu špatně přístupných.
I když robot Handle dvoukolový pojezdový systém, princip s upevněním každého kola na speciální noze s velkou světlostí a mimořádnou obratností umožňuje se velmi snadno přizpůsobovat nejrůznějším překážkám a umožňuje i skákat. Na centrálním těle je pak upevněno rameno vyvažované protizávažím dynamicky vyrovnávající pohyb. Trošku profil robota připomíná tvar slepice. Výhodou tohoto konceptu je možnost prakticky okamžitého nasazení do stávajících logistických hal bez nutnosti vytvářet pro robota nějakou speciální pracovní infrastrukturu. Robot se tak dá snadno použít na libovolné místě. Prakticky jakoby přímo nahrazuje člověkem vedený manipulátor.
 Výrobce k němu uvádí, že robot Handle je navržen jako plně autonomní a byl navržen tak, aby jedním robotem šlo realizovat více různých úloh, tedy aby byl co nejvíce univerzální a aby dosáhl vysokých i nízkých rozměrů a pohybovat se po celém vašem zařízení nebo úplně do jiného skladu. Proto pro svoji orientaci a vidění využívá software umělé inteligence AI s hlubokým učením Deep Learning ke správné spojení 3D i 2D identifikaci a lokalizaci prostředí a předmětů. Díky tomu umožňuje se sám z orientovat a nalézt například krabice pro vykládání nákladních automobilů a paletizaci a aktivovat jej doslova jedním stiskem tlačítka. Jeho pracovní výkon prý činní až 360 ks / hod pro krabice o hmotnosti do 15 kg. K jejich uchopování využívá systém přísavek na hlavě upevněné na rameni s dosahem 3 m. Ale použít lze i jiné "nosné" prostředky. Maximální rychlost pohybu je 4 m/s a bateriové napájení samozřejmě umožňuje prakticky prostorově neomezený volný pohyb.
Výrobce k němu uvádí, že robot Handle je navržen jako plně autonomní a byl navržen tak, aby jedním robotem šlo realizovat více různých úloh, tedy aby byl co nejvíce univerzální a aby dosáhl vysokých i nízkých rozměrů a pohybovat se po celém vašem zařízení nebo úplně do jiného skladu. Proto pro svoji orientaci a vidění využívá software umělé inteligence AI s hlubokým učením Deep Learning ke správné spojení 3D i 2D identifikaci a lokalizaci prostředí a předmětů. Díky tomu umožňuje se sám z orientovat a nalézt například krabice pro vykládání nákladních automobilů a paletizaci a aktivovat jej doslova jedním stiskem tlačítka. Jeho pracovní výkon prý činní až 360 ks / hod pro krabice o hmotnosti do 15 kg. K jejich uchopování využívá systém přísavek na hlavě upevněné na rameni s dosahem 3 m. Ale použít lze i jiné "nosné" prostředky. Maximální rychlost pohybu je 4 m/s a bateriové napájení samozřejmě umožňuje prakticky prostorově neomezený volný pohyb.
Ukázková videa robots Boston Dynamics Handle.
 Robot pro přenášení zboží z auta až do bytu
Robot pro přenášení zboží z auta až do bytu

S rozvojem a budoucím předpokládaným nasazením autonomních automobilů bez řidičů, zejména v oblasti rozvážení zboží a logistice, vyvstal zajímavý nedostatek v podobě chybějící služby donášky až "do dveří" aktuálně obvykle prováděnou řidičem vozu. Autonomní rozvážkový vůz v budoucnu přijede sám až před dům, ale v mnoha případech zákazník očekává donesení od silnice / příjezdové cesty až přímo ke dveřím či přímo do objektu.
Proto společnost Agility Robotics vymyslela takového speciální roznáškového robota jménem "Digit", který by se jako pomocné zařízení vezlo spolu s balíčkem v rozvážkovém autě, ale následně by z auta vylezl a zásilku dopravil až přímo k zákazníkovi tzv. za dveře nebo do rukou. Vzhledem k tomu, že na této cestě jej ve většině případů budou čekat nějaké překážky ve formě schodů či různě nerovného terénu, opět byl zvolen koncept chodícího robota.


Velká výhoda chodících robotů proti jezdícím je možnost chodit po schodech. Infrastruktura lidí se tedy nemusí přizpůsobovat robotů...
Web společnosti Agility Robotics uvádí, že robot Digit se 4 pažemi již poskytuje čtyři stupně volnosti (4-DOF). Proti jejich staršímu projektu "Cassie" poskytuje provedení s 2 nohama a 2 uchopovacími pažemi výrazně vyšší mobilitu i užitečnost, protože při případném pádu může sám vstát, máváním horním párem končetin lze také efektivně řídit rovnováhu nebo otevřít dveře a pak zejména jsou užitečné při manipulaci nebo přenášení předmětů. Digit je v tomto směru konstruován tak, aby mohl skládal krabice o hmotnosti až 18 lb (18 kg). Navíc robot obsahuje řídící systém, které již má umožňovat pokročilé chování, jako je lezení po schodech a plánování kroků. Vše je ovládané pomocí robustního API, díky němuž lze k robotu přistupovat i prostřednictvím bezdrátového spojení. Modulární procesorový systém pak umožňuje další průběžný vývoj nových vlastností nebo přizpůsobení novým úkolům, tedy implementovat další schopnosti nebo posilování schopnosti učení.
Ukázková videa robota Agility Robotics Digit.
 Robot pro složité stavební a montážní činnosti
Robot pro složité stavební a montážní činnosti
Nedostatek řemeslníků a stárnoucí populace nejen u nás, ale prakticky ve většině vyspělých zemích, nutí firmy vyvíjející roboty navrhnout ideální koncept jejich robotické náhrady. Zvláště pokud má jít opakující se činností manipulace s těžkými břemeny. Jednou z takových oblastí, kde by byla robotizace velmi přínosná, ale je na druhou stranu i velmi náročná na efektivní realizaci, je například stavebnictví. Zde je z důvodu často složitého pochozího povrchu (terénu) stavebního prostředí také zajímavé se zabývat konceptem chodícího robota.
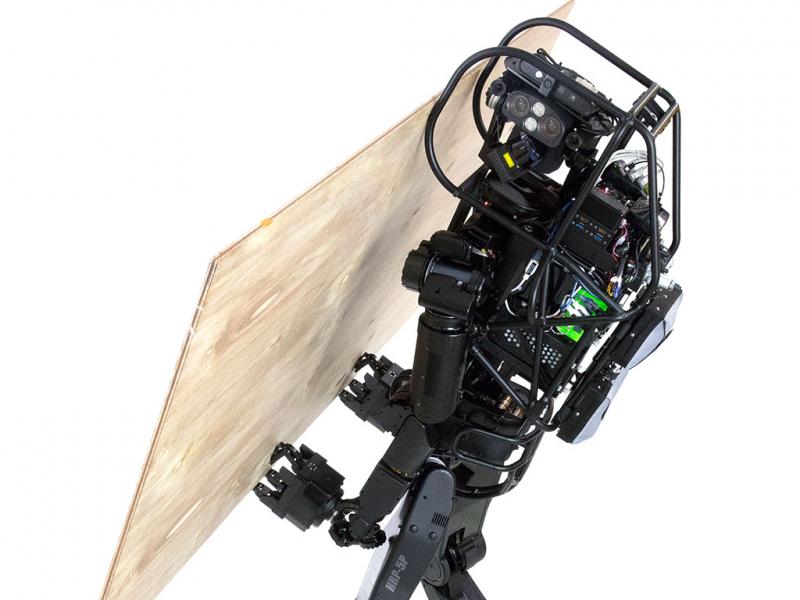
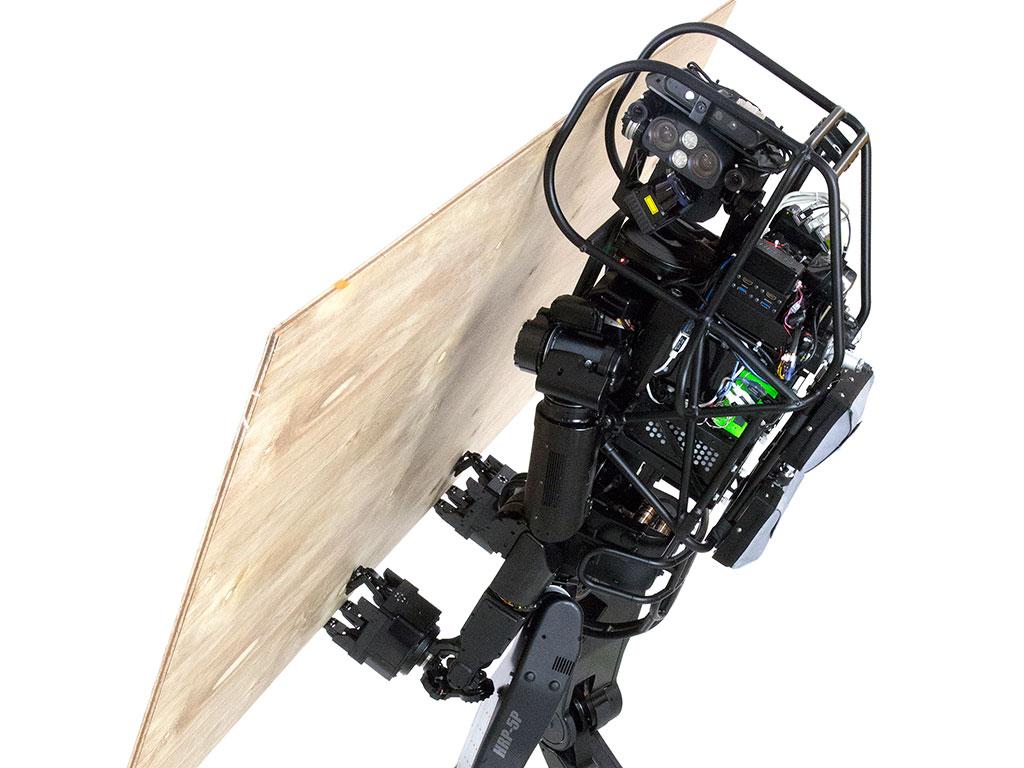
Japonská společnost AIST například navrhla, realizovala a dále vyvíjí robota ve formě člověka pro montáž desek uvnitř budovy. Zde je systém chodícího robota velmi výhodný, protože hlavní je flexibilita pohybů a není již tak důležitá extrémní okamžitá rychlost.
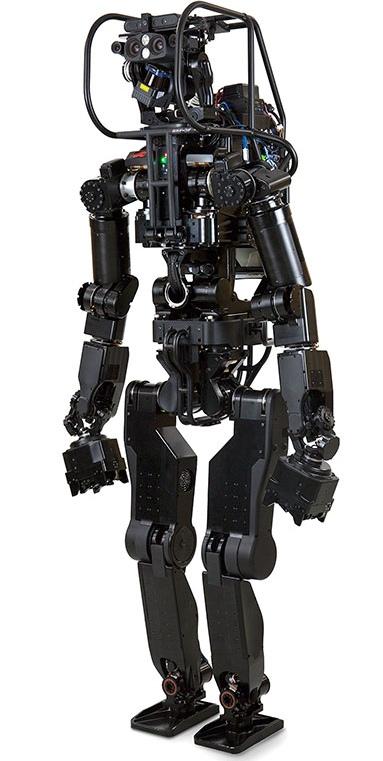 Robot s označením HRP-5P byl proto byl navržen jako pracovně pohybová kopie člověka s tím, že místo specializovaných montážních nástrojů je schopen identifikovat a používat i klasické "lidské" pracovní nástroje, jako např. vrtačka či sponkovačka apod. AIST na svém webu uvádí, že byl navržen jako 182 cm vysoký, 101 kg těžký humanoidní robot s celkem 37 stupni volnosti (dva v krku, tři v pase, osm v pažích, šest v nohách a dva v jeho ruce), jehož robotická inteligence zahrnuje měření prostředí a rozpoznávání objektů, plánování a řízení pohybu celého těla, popis úkolů a správu jejich provádění a vysoce spolehlivé technologie systemizace.
Robot s označením HRP-5P byl proto byl navržen jako pracovně pohybová kopie člověka s tím, že místo specializovaných montážních nástrojů je schopen identifikovat a používat i klasické "lidské" pracovní nástroje, jako např. vrtačka či sponkovačka apod. AIST na svém webu uvádí, že byl navržen jako 182 cm vysoký, 101 kg těžký humanoidní robot s celkem 37 stupni volnosti (dva v krku, tři v pase, osm v pažích, šest v nohách a dva v jeho ruce), jehož robotická inteligence zahrnuje měření prostředí a rozpoznávání objektů, plánování a řízení pohybu celého těla, popis úkolů a správu jejich provádění a vysoce spolehlivé technologie systemizace.
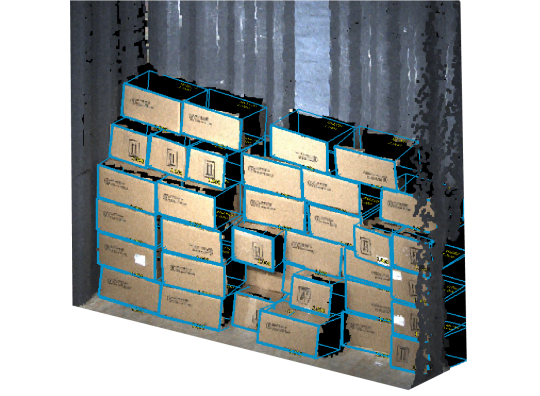
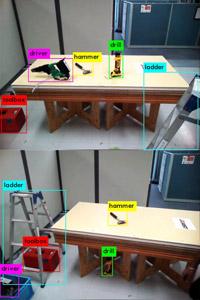
Pomocí senzorů umístěných na hlavě robot neustále získává 3D měření okolního prostředí s frekvencí 0,3 Hz. I když je zorné pole blokováno objekty používanými při práci, uložené a aktualizované výsledky měření umožňují provádění plánu chůze při přenášení panelu nebo korekci chůze při sklouznutí nohou. Učení zahrnuje konvoluční neuronovou síť pomocí nově vytvořené databáze obrazů pracovních objektů. Robot dokáže detekovat deset typů oblastí 2D objektů s vysokou přesností 90% a více, a to i na pozadí s nízkým kontrastem nebo při slabém osvětlení.
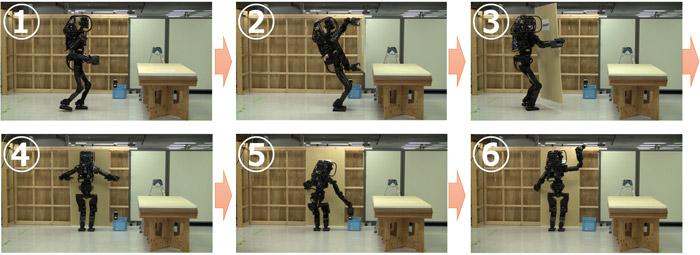
Kroky robotické montáže sádrokartonové desky prakticky stejně, jak to dělá lidský montér.
Díky výše uvedeným implementovaných schopnostem může HRP-5P například realizovat autonomní instalaci desek v prostředí běžné budovy, jako jsou sádrokartonové desky (1820 × 910 × 10 mm, přibližně 11 kg) nebo překližkové desky (1800 × 900 × 12 mm, přibližně 13 kg), což je typický příklad těžké práce na staveništích. Použití HRP-5P jako vývojové platformy ve spolupráci mezi průmyslem a akademickou sférou pak dle inženýrů AIST slibuje urychlení výzkumu a vývoje směrem k praktické aplikaci humanoidních robotů i při montáži velkých předmětů a konstrukcí, jako jsou např. letadla a lodě.
Ukázkové video robota AIST HRP-5P.
Závěr
 V tomto článku jsem chtěl ukázat, že roboti pro průmyslové a logistické aplikace nutně nemusí mít jen podobu robotických ramen nebo pojezdových vozidel AMR, jak jsem již mnohokrát na serveru automatizace.hw.cz prezentovali, ale vhodné mohou být i konstrukce nějakých "vícekončetinových" chodících zařízení. Takové roboty by bylo možné nasadit i do náročnějších prostor obsahující různé mechanické překážky (schody, dveře, rampy apod.).
V tomto článku jsem chtěl ukázat, že roboti pro průmyslové a logistické aplikace nutně nemusí mít jen podobu robotických ramen nebo pojezdových vozidel AMR, jak jsem již mnohokrát na serveru automatizace.hw.cz prezentovali, ale vhodné mohou být i konstrukce nějakých "vícekončetinových" chodících zařízení. Takové roboty by bylo možné nasadit i do náročnějších prostor obsahující různé mechanické překážky (schody, dveře, rampy apod.).
Dost často se uvádí, že vyvíjet a realizovat robota jako chodící stroj je neefektivní a výhodnější je vyrábět specializovaná provedení pro konkrétní aplikace. To je sice v mnoha aplikacích pravda, nicméně tento koncept s prosazováním režimu plné a maximální automatizace již v mnoha případech naráží na velmi velká omezení. Výhoda konceptu robota a lá člověk či zvíře je prostě velká flexibilita využití. Ona i přírodní evoluce z dlouhodobého pohledu podporuje spíše univerzální více flexibilní řešení, protože ty byly časem vyhodnoceny jako výhodnější pro přežití. Je tedy nasnadě okopírovat a využít již dlouhodobým přírodním vývojem odzkoušené koncepty i v oblasti robotizace.
Odkazy:
- Webové stránky společnosti Agility Robotics: https://www.agilityrobotics.com,
- Webové stránky společnosti Boston Dynamics: https://www.agilityrobotics.com
- Webové stránky robots.ieee.org : https://robots.ieee.org/robots/hrp5p/?gallery=photo2
- Web společnosti AIST o robotovi HRP-5P: https://www.aist.go.jp/aist_e/list/latest_research/2018/20181116/en20181116.html



