Jaká je budoucnost průmyslových robotů?
 Dnes je v průmyslu doma doslova robotická a nasazování robotických ramen probíhá již poměrně ve velmi vysokých obrátkách. Rychlý průmyslový roboti pro vysoce opakující se operace i tzv. kolaborativní roboti (kolaborace) pro pomalejší aplikace s častou změnou pohybů, jsou dnes i běžnou praxí i v dříve neočekávaných operacích vykonávané doposud lidmi. Nicméně jak roste počet robotických aplikací, velmi aktuálně i velmi roste práce techniků, kteří tyto roboty v aplikacích zprovozňují. Často jde o časově velmi náročnou práci, naprogramovat takové roboty, aby se skutečně pohybovali a opakovaně spolehlivě pracovali. V mnoha případech dá se taková práce přirovnat k programátorské otročině.
Dnes je v průmyslu doma doslova robotická a nasazování robotických ramen probíhá již poměrně ve velmi vysokých obrátkách. Rychlý průmyslový roboti pro vysoce opakující se operace i tzv. kolaborativní roboti (kolaborace) pro pomalejší aplikace s častou změnou pohybů, jsou dnes i běžnou praxí i v dříve neočekávaných operacích vykonávané doposud lidmi. Nicméně jak roste počet robotických aplikací, velmi aktuálně i velmi roste práce techniků, kteří tyto roboty v aplikacích zprovozňují. Často jde o časově velmi náročnou práci, naprogramovat takové roboty, aby se skutečně pohybovali a opakovaně spolehlivě pracovali. V mnoha případech dá se taková práce přirovnat k programátorské otročině.
A v této oblasti je jistě schovaný budoucí vývoj průmyslových robotů, tedy k plnému nasazení umělé inteligence AI právě pro potřeby nastavení pohybové funkce robotů.
 Proč by měl programátor / operátor složitě robotickému ramenu hledat a definovat pohybovou trajektorii, přemýšlet nad problematickou omezených pozic a natočení kloubů 6-osého robota a jeho mrtvá místa, když sám robot, pokud tedy má být označován jako alespoň trošku inteligentní, by měl nejlépe vědět svoje pohybové a rozměrové i rychlostí limity? Nestačilo by prostě, aby si jen robotické rameno samo naskenovalo obrysy prostoru, ve kterém se mám pohybovat (kam až může dosáhnout) a operátor by jen definovat místa přenosu odkud - kam a pak parametry odebíraných / přenášených předmětů (jejich rozměry, hmotnost, tvar, tvrdost / křehkost, pružnost apod.)? Robot by si jednat ze svých provozních parametrů jednat ramene, jednat připojeného uchopovacího nástroje sám "vymyslel" jaký způsob uchopení je nejefektivnější a jaká trajektorie a rychlost pohybu nejrychlejší?
Proč by měl programátor / operátor složitě robotickému ramenu hledat a definovat pohybovou trajektorii, přemýšlet nad problematickou omezených pozic a natočení kloubů 6-osého robota a jeho mrtvá místa, když sám robot, pokud tedy má být označován jako alespoň trošku inteligentní, by měl nejlépe vědět svoje pohybové a rozměrové i rychlostí limity? Nestačilo by prostě, aby si jen robotické rameno samo naskenovalo obrysy prostoru, ve kterém se mám pohybovat (kam až může dosáhnout) a operátor by jen definovat místa přenosu odkud - kam a pak parametry odebíraných / přenášených předmětů (jejich rozměry, hmotnost, tvar, tvrdost / křehkost, pružnost apod.)? Robot by si jednat ze svých provozních parametrů jednat ramene, jednat připojeného uchopovacího nástroje sám "vymyslel" jaký způsob uchopení je nejefektivnější a jaká trajektorie a rychlost pohybu nejrychlejší?
Umělá inteligence robotických ramen jako u AIV
 Jasný řešení této "programátorské otročiny" je použití umělé inteligence pro automatické autonomní učení či změny pohybů robotů.
Jasný řešení této "programátorské otročiny" je použití umělé inteligence pro automatické autonomní učení či změny pohybů robotů.
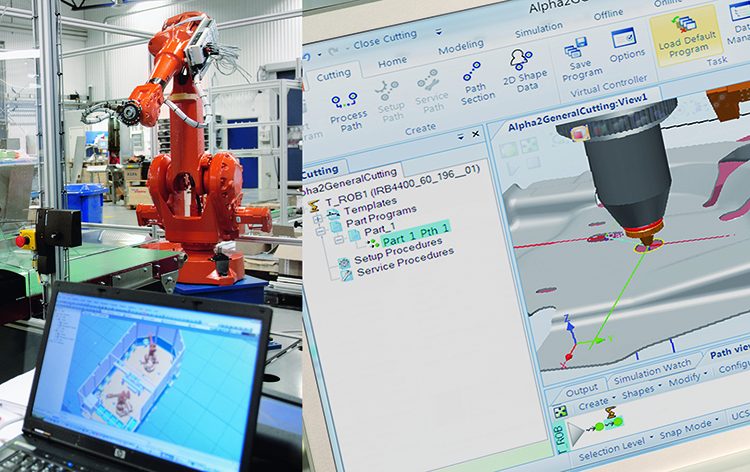
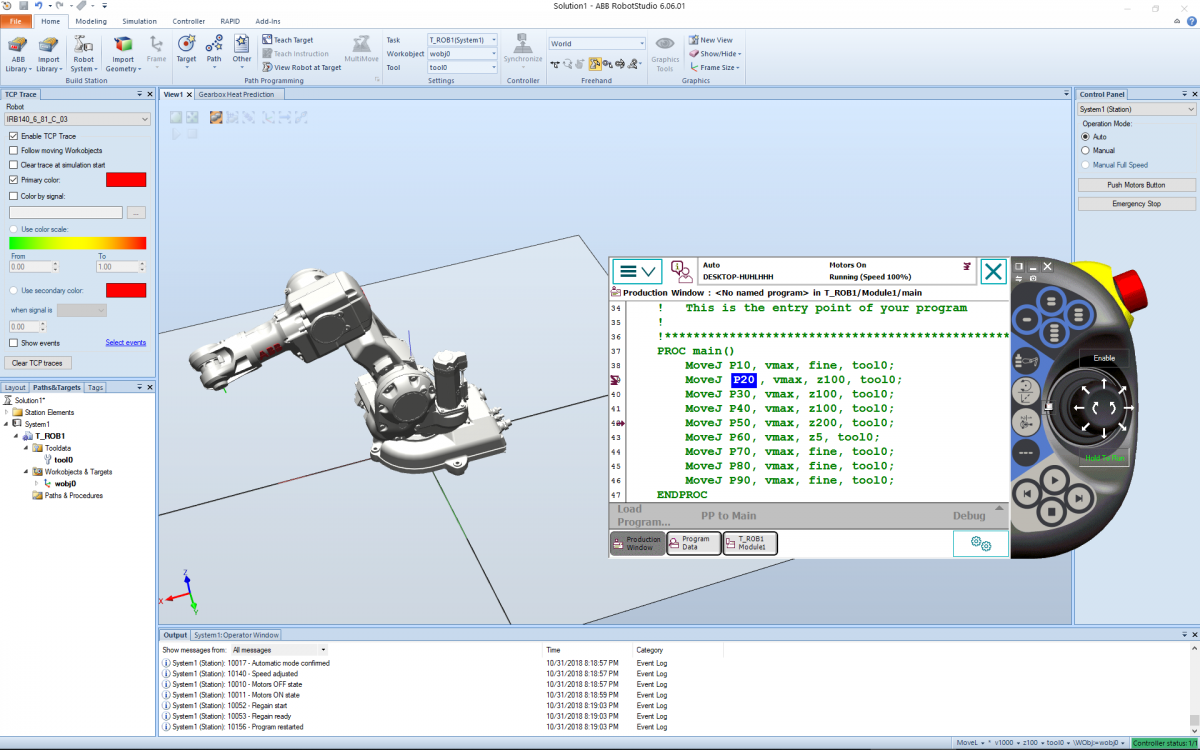
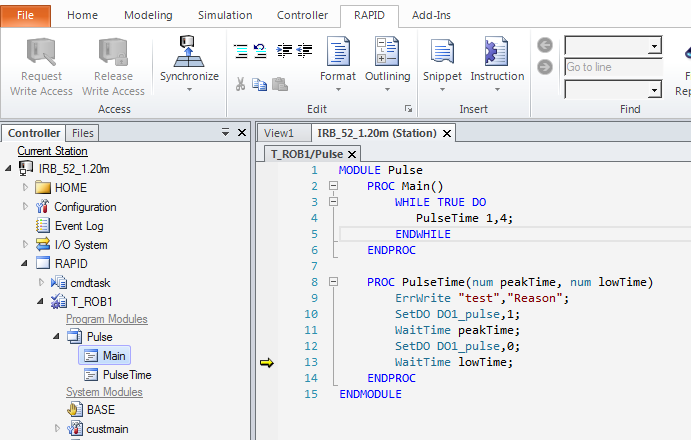
Doposud je v oblasti průmyslových robotů stále standardem programovat do robota požadované pohybové trajektorie nějakým způsobem jednak zadávání souřadnicových bodů, kudy má robot s ramenem projet, jakou rychlostí, s jakou přesností, jakým zrychlením, kde má čekat a kde ne a plno dalších definic, kterými se robot prakticky programuje.
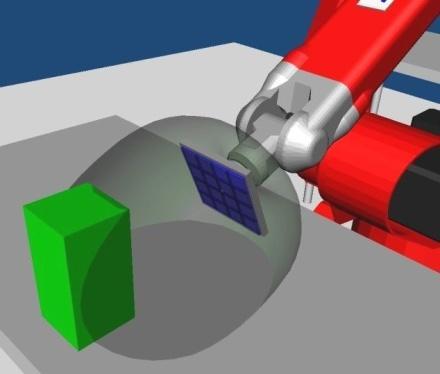
 Zajímavým řešením je implementace automatického hledání efektivní trajektorie pohybu ramene robota jako u robotických vozíků. Prostě se jen nakreslí pracovní oblast v podobě virtuální bezpečnostní klece a kde se produkty mají nabírat a kam se mají přesouvat či vkládat a pak parametrizaci samotných přenášených produktů a obalů. Robot by měl být již sám schopen pružné změny pohybové trajektorie jednak podle nadefinovaného či naskenovanou jeho okolního prostoru a i měnit ji v reálném čase podle změny prostředí a kvůli vyhnutí se novým vzniklým překážkám. Vždyť toto již bez problémů také zvládají robotické samonaváděcí vozíky, tak proč podobnou technologii neimplementovat i do průmyslových robotů typu rameno? Proč nemůže mít robotické rameno mít bezpečnostní laserový skenery implementované přímo do těla ramene a průběžně si skenovat prostor okolo a včas zastavit před i nově vzniklou překážkou, nebo lépe ji efektivní změnou pohybu se jí vyhnout podobně, jako to právě dělají oni již zmíněné robotické vozíky?
Zajímavým řešením je implementace automatického hledání efektivní trajektorie pohybu ramene robota jako u robotických vozíků. Prostě se jen nakreslí pracovní oblast v podobě virtuální bezpečnostní klece a kde se produkty mají nabírat a kam se mají přesouvat či vkládat a pak parametrizaci samotných přenášených produktů a obalů. Robot by měl být již sám schopen pružné změny pohybové trajektorie jednak podle nadefinovaného či naskenovanou jeho okolního prostoru a i měnit ji v reálném čase podle změny prostředí a kvůli vyhnutí se novým vzniklým překážkám. Vždyť toto již bez problémů také zvládají robotické samonaváděcí vozíky, tak proč podobnou technologii neimplementovat i do průmyslových robotů typu rameno? Proč nemůže mít robotické rameno mít bezpečnostní laserový skenery implementované přímo do těla ramene a průběžně si skenovat prostor okolo a včas zastavit před i nově vzniklou překážkou, nebo lépe ji efektivní změnou pohybu se jí vyhnout podobně, jako to právě dělají oni již zmíněné robotické vozíky?
 Pokud jste někde byli na alespoň krátké prezentaci jejich funkci, tak jejich "programování" spočívá jen ve správném nakreslení mapy pojezdového prostoru a nadefinování míst, kterým je nutné se vždy vyhnout a k jízdě je nepoužívat, a pak odkud a kam se jede. Nebo ještě jednodušeji: mapa pohybového prostoru se ani nemusí kreslit, ale stačí ji s robotem projet a on si již svým laserovými skenovacími senzory mapu vytvoří sám. Uživatel / operátor mu pak jen v mapě může dovymezit prostory, kde je nežádoucí, aby se robot pohyboval, ale zbytek, tedy určení konkrétní pohybové přepravní trasy již se nechá na umělé inteligenci a skenerech robota. Moderní přepravní roboti AMR (Autonomous Mobile Robot) či AIV (Autonomous Intelligent Vehicles), jako například Omron LD, již jsou bez problémů schopní se i pohybovat mezi lidmi a i ve velmi lidmi a předměty zahuštěném prostoru a průběžně spolehlivě situaci vyhodnocovat a měnit pohybové trasy.
Pokud jste někde byli na alespoň krátké prezentaci jejich funkci, tak jejich "programování" spočívá jen ve správném nakreslení mapy pojezdového prostoru a nadefinování míst, kterým je nutné se vždy vyhnout a k jízdě je nepoužívat, a pak odkud a kam se jede. Nebo ještě jednodušeji: mapa pohybového prostoru se ani nemusí kreslit, ale stačí ji s robotem projet a on si již svým laserovými skenovacími senzory mapu vytvoří sám. Uživatel / operátor mu pak jen v mapě může dovymezit prostory, kde je nežádoucí, aby se robot pohyboval, ale zbytek, tedy určení konkrétní pohybové přepravní trasy již se nechá na umělé inteligenci a skenerech robota. Moderní přepravní roboti AMR (Autonomous Mobile Robot) či AIV (Autonomous Intelligent Vehicles), jako například Omron LD, již jsou bez problémů schopní se i pohybovat mezi lidmi a i ve velmi lidmi a předměty zahuštěném prostoru a průběžně spolehlivě situaci vyhodnocovat a měnit pohybové trasy.
Zcela stejná technologie je výhodná i pro průmyslové roboty typu ramene, kde sice robot pevně sedí / je upevněný svojí základnou na jednom místě, nicméně na pohyb ramene lze aplikovat podobné principy jako na pohyby AIV či AMR transportních robotů.
Nejen síla a rychlost, ale více inteligence v robotizaci
 Co budou důležité vlastnosti kvalitního moderního budoucího průmyslového robota?
Co budou důležité vlastnosti kvalitního moderního budoucího průmyslového robota?
-
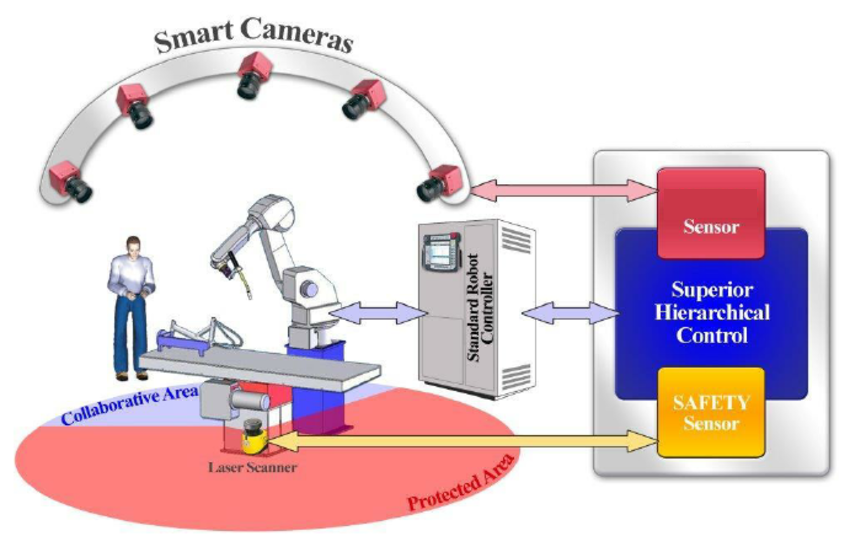
Kvalitní kontakt s okolním prostředím prostřednictvím senzorů obrazu, tvarů, síly/tlaku atd.
-
Řídící umělá inteligence umožňující se co nejrychleji v reálném čase na základě senzorických informací přizpůsobit změněným podmínkám.
Doposavad se často u průmyslových robotů hlavně "řešily" hardwarové parametry typu dosah a rychlost pohybů a nosnost. Ale vzhledem k omezenému množství typů běžných průmyslových aplikací, již se v této oblasti dle mého názoru narazilo více méně na limity nějakého velkého expandované. Prostě v širokých nabídkách mnoha celosvětově si konkurujících firem s průmyslovými roboty již prakticky v tomto směru nenajdete skulinu, kterou by nějaký výrobce nezaplnil. Stručně řečeno, většina velkých robotů Vám řekne: "Definujte jak velké a těžké věci na jakou vzdálenost a jak rychle chcete přenášet a my Vám k tomu vytypujeme vhodného robota". Takže do budoucna a již teď se to stává realitou bude v konkurenčním boji rozhodujícím prvkem "inteligence" robotů, tedy jak jsou schopni přesně a rychle reagovat na své okolí (to je ta senzorická část) a jak efektivně a rychle
Senzorická část robotů
 V této oblasti nastává nějaký pokrok prakticky každý den. Zvláště robotické 2D a hlavně již i 3D kamerové systémy umožňují mezi sebou rozeznávat spolehlivě odebírané / uchopované předměty podle jejich tvarů, rozměrům, barvy či struktury povrchu, podobně jako lidé svým zrakem. V tomto směru se schopnosti 3D kamer lidskému oku již začínají velmi blížit. 3D laserové skenery pak již dávají robotům již z pohledu lidské vlastnosti odhadování vzdálenost až "nadpřirozené schopnosti".
V této oblasti nastává nějaký pokrok prakticky každý den. Zvláště robotické 2D a hlavně již i 3D kamerové systémy umožňují mezi sebou rozeznávat spolehlivě odebírané / uchopované předměty podle jejich tvarů, rozměrům, barvy či struktury povrchu, podobně jako lidé svým zrakem. V tomto směru se schopnosti 3D kamer lidskému oku již začínají velmi blížit. 3D laserové skenery pak již dávají robotům již z pohledu lidské vlastnosti odhadování vzdálenost až "nadpřirozené schopnosti".
 Integrované vážení v uchopovačích je možné i hned posoudit a třídit předměty i podle jejich hmotnosti, podobně, jako lidé jsou schopni po uchopování nějakých předmětů je rozdělit na lehké či těžké. Silové / tlakové senzory stisku uchopovačů umožňují již přesně posoudit tvrdost / pružnost předmětu a aplikovat jen nezbytně nutnou sílu na uchopení, aniž by se předmět rozmáčknul.
Integrované vážení v uchopovačích je možné i hned posoudit a třídit předměty i podle jejich hmotnosti, podobně, jako lidé jsou schopni po uchopování nějakých předmětů je rozdělit na lehké či těžké. Silové / tlakové senzory stisku uchopovačů umožňují již přesně posoudit tvrdost / pružnost předmětu a aplikovat jen nezbytně nutnou sílu na uchopení, aniž by se předmět rozmáčknul.
Proti lidským rukou již moderní uchopovací prvky snad ještě jen schází ten dotykový cit na strukturu / hrubost povrchu, které však v budoucnu budou řešit "chytré" nanomateriály ve formě látek, které budou právě již svou senzorickou funkcí budou napodobovat lidskou kůži - přesně se přizpůsobí struktuře povrchu a jejich mikrometrové ohyby / prohnutí budu generovat příslušně úměrný elektrický náboj, který tak bude informovat o hrubosti/hladkosti povrchu uchopovaného předmětu.
Inteligenční část robotů
 Inteligenční část robotů, pro snažší přiblížení ji můžeme označit jako software, i když v případě umělé inteligence již nemusí jít v software v tradičním smyslu strukturovaného programu logických příkazů. Tuto část lze rozdělit na sekce:
Inteligenční část robotů, pro snažší přiblížení ji můžeme označit jako software, i když v případě umělé inteligence již nemusí jít v software v tradičním smyslu strukturovaného programu logických příkazů. Tuto část lze rozdělit na sekce:
-
Inteligence při učení
-
Inteligence při provozu
V prvním případě inteligence při učení jde o to, jak náročné, či v tomto případě lépe řečeno jednoduché je pro operátora nadefinovat robotovi, co se po něm chce provádět za úkony. Čím menší počet parametrů je nutné robotovi definovat, a tedy čím více informací je robot schopen si sám zjistit/nasnímat/odvodit, tím samozřejmě pro koncového uživatele / operátora či seřizovače lépe.
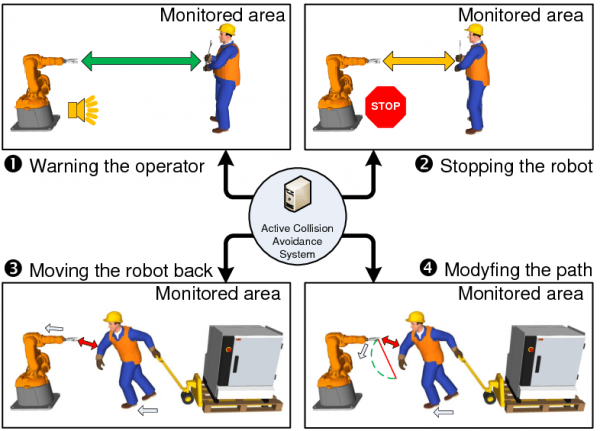
 V druhé bodě inteligence při provozu pak jde o to, aby se robot vypořádat sám bez zásahů operátora s co nejvíce situacemi, včetně těch nečekaných a neznámých, tedy takových, které přímé nebyly k dispozici k "nastudování / procvičení" v době učení. Opět s čím méně problémy bude robot operátora "otravovat", tím samozřejmě lépe. V případě vyskytnutí náhlých problémů či překážek standardnímu běhu robotu není hned nutné, aby se reakce na změnu udála hned co nejefektivnější, ale primárně je důležité, aby se prostě funkce robota "nezasekla" v nečinnosti s jen hloupých voláním na operátora typu "help, help!". Obvykle, vzhledem k zákonům schválnosti, to nastaně v době, kdy operátor musí řešit problém někde jinde nebo je na záchodě či obědě. A stejně většina operátorů v první reakci udělá jen reset stavu robota a zkusí ho opět spustit v automatickém režimu a doufá, že to nějak samo opět rozjede...
V druhé bodě inteligence při provozu pak jde o to, aby se robot vypořádat sám bez zásahů operátora s co nejvíce situacemi, včetně těch nečekaných a neznámých, tedy takových, které přímé nebyly k dispozici k "nastudování / procvičení" v době učení. Opět s čím méně problémy bude robot operátora "otravovat", tím samozřejmě lépe. V případě vyskytnutí náhlých problémů či překážek standardnímu běhu robotu není hned nutné, aby se reakce na změnu udála hned co nejefektivnější, ale primárně je důležité, aby se prostě funkce robota "nezasekla" v nečinnosti s jen hloupých voláním na operátora typu "help, help!". Obvykle, vzhledem k zákonům schválnosti, to nastaně v době, kdy operátor musí řešit problém někde jinde nebo je na záchodě či obědě. A stejně většina operátorů v první reakci udělá jen reset stavu robota a zkusí ho opět spustit v automatickém režimu a doufá, že to nějak samo opět rozjede...
Závěr
Po výkonové / rychlostní stránce jsou dnešní moderní průmyslový roboti pro většinu aplikací vybaveni zcela dostatečně. Budoucí vývoj robotizace je rozhodnete v aplikaci výrazné umělé inteligence tak, aby se i robotická ramena stala ve velké míře autonomní a jejich programování se změnilo v jen základní nakonfigurování parametrů prostředí a rámcové definování požadované funkce. Celá programátorská práce by se tak přesunula na ramena vývojářů výrobce robota, kteří budou vylepšovat autonomní učící a funkční režimy u výrobců robotů a není na bedrech v provozu vystresovaných seřizovačů či operátorů, kteří jsou pod přímý tlakem manažerů urgentní moderní rychlé a flexibilní výroby.
Odkazy:
- Webové stránky BVV Brno - MSV 2020: https://www.bvv.cz/msv/aktuality/gaben-packaging-live-balici-linka-v-novem-s/
- Webové stránky ABB - softwaru RobotStudio: https://new.abb.com/products/robotics/robotstudio/tutorials



