 Vyhýbání se kolizím v automatizovaných naváděcích systémech vozidel (AGV) a různých mobilních platform, monitorování zadní části vysokozdvižných vozíků nebo těžkých nákladních vozidel jsou příklady dnes již běžných potřeb moderní mobilní intralogistiky.
Vyhýbání se kolizím v automatizovaných naváděcích systémech vozidel (AGV) a různých mobilních platform, monitorování zadní části vysokozdvižných vozíků nebo těžkých nákladních vozidel jsou příklady dnes již běžných potřeb moderní mobilní intralogistiky.
Dalšími příklady vhodných kontrol v nejen v oblasti logistiky, ale i výroby, může být detekce přečnívání přepravovaných předmětů, měření obrysů nákladu na paletě, kontrola obsazení polic, rozlišení nejrůznějších nosičů nákladu, roboticky podporovaná paletizace apod. Tyto a mnoho dalších aplikací lze vylepšit s použitím 3D kamerového senzoru na principu LiDARu.
Proč použít 3D LiDARový senzor?
 Pro zajištění bezpečnosti automatizované a robotizované výroby a logistiky se již poměrně dlouho využívá i služeb bezpečnostních 2D LiDAR senzorů označované jako obvykle jako bezpečnostní laserové skenery. Ty nabízejí potřebnou spolehlivost a dokáží zajišťovat bezpečnost provozu z pohledu detekce nouzových stavů pro omezení nebo zastavení pro člověka nebezpečných pohybů strojů a robotů, kde monitorují jízdní dráhy a pohybové oblasti vozidel a jsou k dispozici v různých velikostech, s různými rozsahy skenování a funkcemi pro prakticky jakýkoli koncept vozidla a oblast použití. Proto se využívají i v případě různých automatizovaných či autonomních přepravních vozidel AGV, kde právě výše uvedené funkce přispívají k certifikované bezpečnosti systémů AGV.
Pro zajištění bezpečnosti automatizované a robotizované výroby a logistiky se již poměrně dlouho využívá i služeb bezpečnostních 2D LiDAR senzorů označované jako obvykle jako bezpečnostní laserové skenery. Ty nabízejí potřebnou spolehlivost a dokáží zajišťovat bezpečnost provozu z pohledu detekce nouzových stavů pro omezení nebo zastavení pro člověka nebezpečných pohybů strojů a robotů, kde monitorují jízdní dráhy a pohybové oblasti vozidel a jsou k dispozici v různých velikostech, s různými rozsahy skenování a funkcemi pro prakticky jakýkoli koncept vozidla a oblast použití. Proto se využívají i v případě různých automatizovaných či autonomních přepravních vozidel AGV, kde právě výše uvedené funkce přispívají k certifikované bezpečnosti systémů AGV.
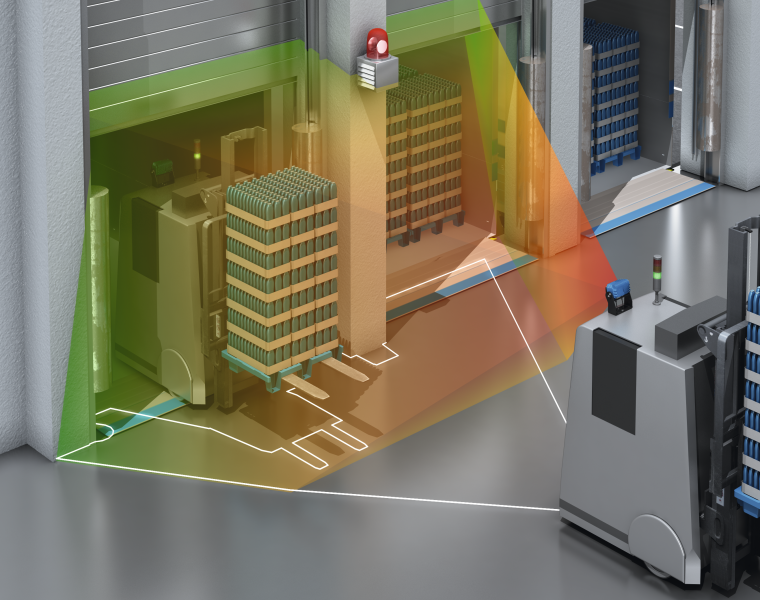
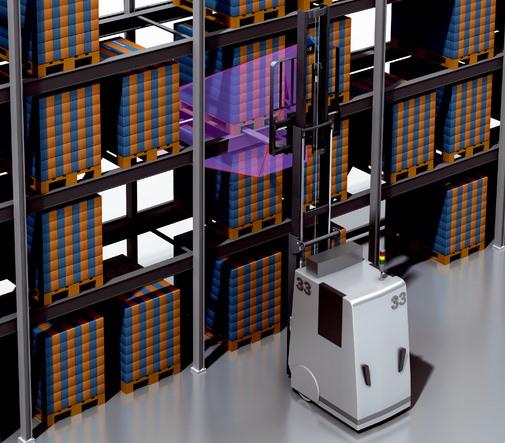
 Ale pokud jde o efektivní provoz vozidel a systémů pro spolehlivější a rychlejší lokalizaci a navigaci, aby dokázaly obejít jakékoli detekované překážky bez zásahu nebo rychleji volit alternativní trasy, nelze přehlížet třetí dimenzi. Ne všechna nebezpečí kolize totiž číhají na úrovni podlahy. Například palety, paletové břemena, zvednuté nosníky, jeřábové háky apod. mohou vyčnívat do jízdních drah v různých výškách. Všechny tyto možnosti mohou vést ke kolizím a poškození vozidla nebo nákladu. U stávajících vysokozdvižných vozíků s posádkou pak mohou posloužit pro detekci obtížně nebo dokonce nemožně viditelných míst ze sedadla řidiče, tedy jako hlídače mrtvého úhlu.
Ale pokud jde o efektivní provoz vozidel a systémů pro spolehlivější a rychlejší lokalizaci a navigaci, aby dokázaly obejít jakékoli detekované překážky bez zásahu nebo rychleji volit alternativní trasy, nelze přehlížet třetí dimenzi. Ne všechna nebezpečí kolize totiž číhají na úrovni podlahy. Například palety, paletové břemena, zvednuté nosníky, jeřábové háky apod. mohou vyčnívat do jízdních drah v různých výškách. Všechny tyto možnosti mohou vést ke kolizím a poškození vozidla nebo nákladu. U stávajících vysokozdvižných vozíků s posádkou pak mohou posloužit pro detekci obtížně nebo dokonce nemožně viditelných míst ze sedadla řidiče, tedy jako hlídače mrtvého úhlu.
Ve všech těchto případech může být zajímavé uvažovat o použití tzv. 3D vizuálních senzorů pracují na principu 3D LiDARu, jako například senzory SICK řady Visionary-T.
Princip 3D senzorů strojového vidění SICK Visionary-T
 Senzory SICK řady Visionary-T jsou univerzální snímače 3D strojového vidění v průmyslovém pouzdře IP67, které jsou vhodné pro integraci do mnoha různých strojů a aplikací.
Senzory SICK řady Visionary-T jsou univerzální snímače 3D strojového vidění v průmyslovém pouzdře IP67, které jsou vhodné pro integraci do mnoha různých strojů a aplikací.
Senzor jako princip detekce využívá měření doby letu ToF (angl.: Time-of-Flight measurement). Zde však nevyužívá měření doby letu pulsů světla („pulsed ToF“), ale fázového posunu mezi vyzařovaným a odraženým paprskem kontinuálně vyzařované modulované amplitudy modulovaná světelné vlny (“phase-shift-based ToF”). Tato druhá varianta může pracovat s několika frekvencemi a tak se snadno vyhnout křížovým interferencím mezi různými LiDARy.
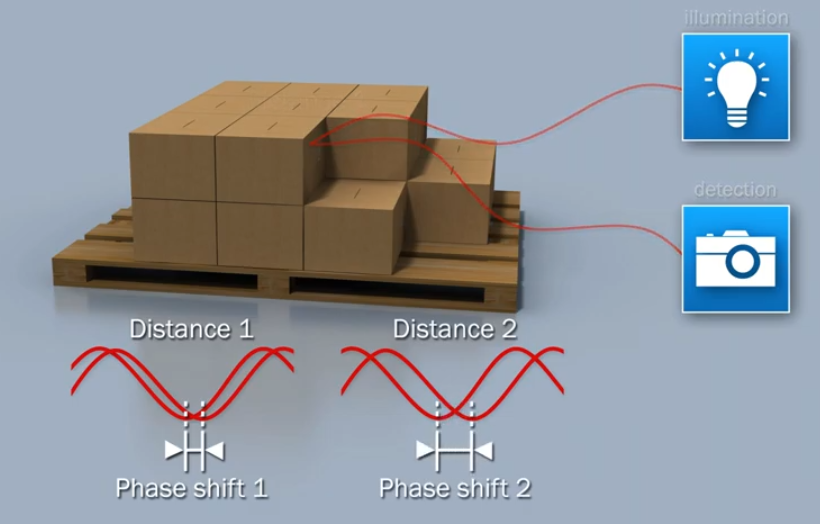

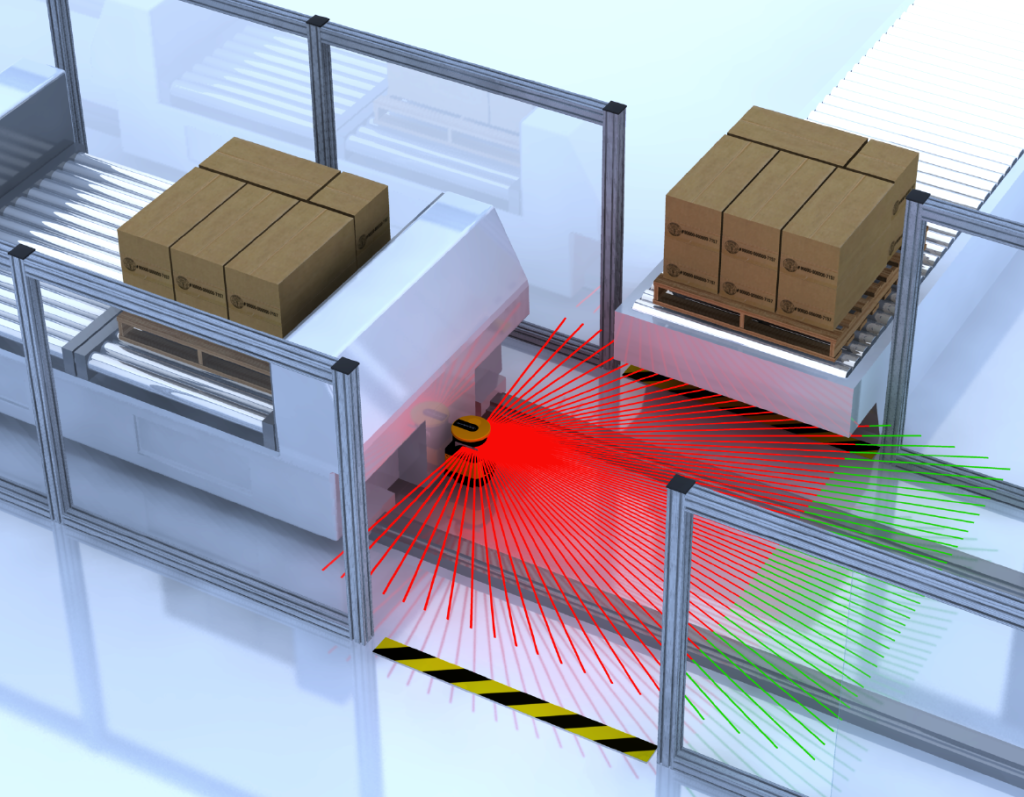
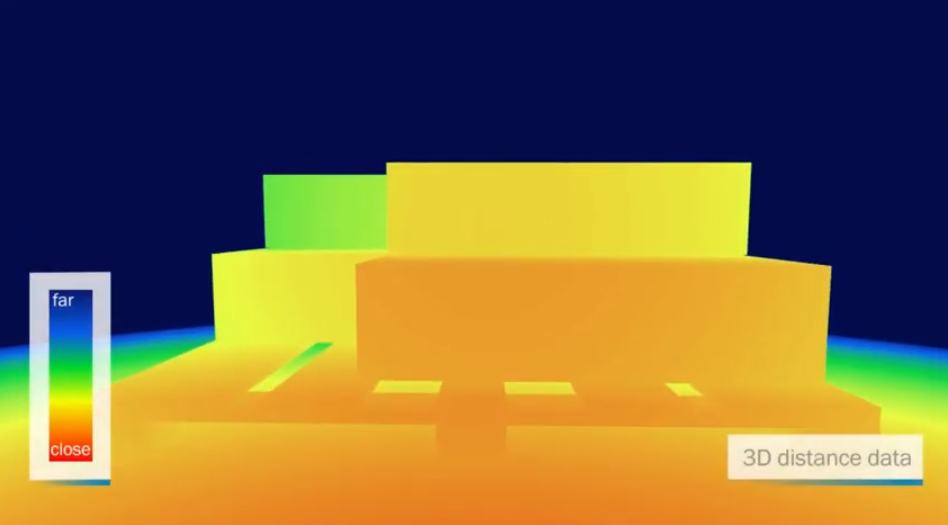
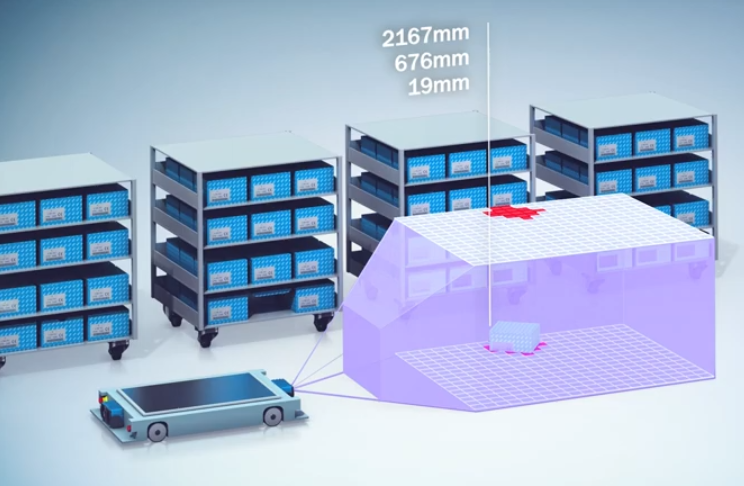 Zde se tedy kontinuálně vysílají modulované laserové světelné paprsky směrem k měřenému objektu v celém zorném poli senzoru, například ve směru jízdy AGV vozidla. Všechny objekty, na které pulsní paprsky světla narazí je pak odrážejí a ty následně dopadají zpět do senzoru, na jeho matici pixelů světelného přijímače. Pro každý přijatý pixel lze pak senzoru prostřednictvím fázového posunu vypočítat vzdálenost k těmto objektům. Informace několika tisíc jednotlivě zaznamenaných pixelů jsou sloučeny do jednoho obrazu, který tak obsahu nejen dvojrozměrnou informaci o intenzitě světla na každém pixelu, ale i informaci o vzdálenosti. Tak lze v softwaru senzoru vytvořit kompletní trojrozměrný obraz celé snímací senzoru v reálném čase, tedy 3D snímek.
Zde se tedy kontinuálně vysílají modulované laserové světelné paprsky směrem k měřenému objektu v celém zorném poli senzoru, například ve směru jízdy AGV vozidla. Všechny objekty, na které pulsní paprsky světla narazí je pak odrážejí a ty následně dopadají zpět do senzoru, na jeho matici pixelů světelného přijímače. Pro každý přijatý pixel lze pak senzoru prostřednictvím fázového posunu vypočítat vzdálenost k těmto objektům. Informace několika tisíc jednotlivě zaznamenaných pixelů jsou sloučeny do jednoho obrazu, který tak obsahu nejen dvojrozměrnou informaci o intenzitě světla na každém pixelu, ale i informaci o vzdálenosti. Tak lze v softwaru senzoru vytvořit kompletní trojrozměrný obraz celé snímací senzoru v reálném čase, tedy 3D snímek.
 Senzory Visionary-T tímto způsobem pořizují až 50 těchto 3D snímků za sekundu v rozlišení 144 × 176 pixelů v rozsahu zorných úhlů snímání 69x56° na vzdálenosti 0,5 až 60 m. Každý z těchto snímků tak v sobě obsahuje více než 25 000 hodnot vzdálenosti.
Senzory Visionary-T tímto způsobem pořizují až 50 těchto 3D snímků za sekundu v rozlišení 144 × 176 pixelů v rozsahu zorných úhlů snímání 69x56° na vzdálenosti 0,5 až 60 m. Každý z těchto snímků tak v sobě obsahuje více než 25 000 hodnot vzdálenosti.
Přesné informace o vzdálenosti okolních objektů jsou užitečné pro vylepšení / zrychlení AGV systému navigace v prostoru. Může to být ve formě "surových" nezpracovaných dat přenášených v reálném čase do nadřazeného systému, tak i předem předzpracovaných dat v senzoru před přenosem nadřazenému systému tak, aby vyhovovala konkrétní aplikaci, nebo i předem kompletně vyhodnocených naměřených dat rovnou aktivující nějaké řídicí akce (výstupy). Z tohoto pohledu tak Visionary-T senzory mohou i přímo spouštět akce prostřednictvím digitálních výstupů nebo naopak jen vysílat "raw" data na ethernetové datového rozhraní.


Různá provedení senzorů SICK Visionary-T
Jak bylo zmíněno výše, na základě provedení a úrovně vyhodnocení snímací části senzoru pořízeného 3D obrazu, lze nabízet zákazníkům různé varianty možností použití senzoru, například zda má být schopen pracovat samostatně s jednoduchým zprovozněním jen pomocí výběru nějakého před připraveného režimu, nebo má umožňovat více komplexní možnosti nějakého složitějšího nastavení / "naprogramování" zpracování a vyhodnocení naměřených 3D snímků.
Proto Sick vytvořil hned 4 různé varianty senzorů řady Visionary-T, právě pro možnost volby dle konkrétních potřeb zákazníka a jeho aplikací:
-
 Visionary-T DT - základní provedení typu Plug&Play s více než 30 různých integrovaných aplikačních konfigurací k výběru hned připravných k použití.
Visionary-T DT - základní provedení typu Plug&Play s více než 30 různých integrovaných aplikačních konfigurací k výběru hned připravných k použití. -
Visionary-T AP - programovatelná varianta pomocí softwaru SICK AppSpace pro detailní přizpůsobení individuálním potřebám a okolnostem.
-
Visionary-T CX - varianta poskytující hrubá 3D data snímků v reálném čase přes Gigabit Ethernet nadřazenému systému k jeho zpracování / vyhodnocení.
-
Visionary-T AG - varianta umožňující inteligentní předzpracování / redukci datového toku různými filtry před přenosem například na internetový cloud.



Základní 3D LiDAR Visionary-T DT
 Visionary-T DT je univerzální snímač 3D vidění v průmyslovém pouzdře IP67, který je vhodný pro integraci do mnoha různých strojů a aplikací. Již tento model nabízí zvýšenou úroveň flexibility nasazení díky více než 30 různých integrovaných aplikačních konfigurací.
Visionary-T DT je univerzální snímač 3D vidění v průmyslovém pouzdře IP67, který je vhodný pro integraci do mnoha různých strojů a aplikací. Již tento model nabízí zvýšenou úroveň flexibility nasazení díky více než 30 různých integrovaných aplikačních konfigurací.
3D data jsou zde zpracovávána přímo v senzoru, aniž by docházelo k jakékoli externí počítačové podpoře. V případě potřeby může vyhodnocení Visionary-T DT senzoru generovat reakce přímo a spouštět akce prostřednictvím digitálních výstupů nebo ethernetového datového rozhraní. Patří mezi ně i spouštění alarmů a výstrah, automatické snížení rychlosti a zastavení vozidla při setkání s překážkou apod. V závislosti na situaci je dokonce možné přepínat mezi více přednastavenými konfiguracemi prostřednictvím řady diskrétních vstupů.
Programovatelný 3D LiDAR Visionary-T AP
 Pokud je potřeba senzor Visionary-T použít pro individuální nebo dokonce průkopnické úkoly, je možné zvolit programovatelnou variantu senzoru označeno jako AP. Tato verze je součástí systému SICK AppSpace, který společnost SICK použila k otevření softwarových možností u senzorů potřebné pro aplikace s odlišnými fyzikálními provozními principy a technologiemi a k jejich programování. Výsledkem je, že i externí uživatelé a integrátoři mohou přizpůsobit funkce Visionary-T AP tak, aby vyhovovaly jejich individuálním potřebám a okolnostem, a to vývojem vlastních aplikací nebo integrací vhodných aplikací dostupných v databázi SICK AppPool.
Pokud je potřeba senzor Visionary-T použít pro individuální nebo dokonce průkopnické úkoly, je možné zvolit programovatelnou variantu senzoru označeno jako AP. Tato verze je součástí systému SICK AppSpace, který společnost SICK použila k otevření softwarových možností u senzorů potřebné pro aplikace s odlišnými fyzikálními provozními principy a technologiemi a k jejich programování. Výsledkem je, že i externí uživatelé a integrátoři mohou přizpůsobit funkce Visionary-T AP tak, aby vyhovovaly jejich individuálním potřebám a okolnostem, a to vývojem vlastních aplikací nebo integrací vhodných aplikací dostupných v databázi SICK AppPool.
 SICK AppSpace je Engineering Framework systém pro individuální senzorové aplikace v němž může vývojář sám nebo společně s odborníky ze společnosti SICK vyvíjet individuální aplikace SensorApp pro své senzory na bázi Sick inteligentních softwarových nástrojů a algoritmů. SICK AppStudio je pak softwarový nástroj pro vyvíjení a programován individuálních zákaznických aplikací. Podporované programovací technologie zahrnují grafický Flow Editor a Lua Script pro vytváření senzorových aplikací. Integrované pomocné prostředky jako emulátor, debugger, zdrojový monitor a rozsáhlá dokumentace a demo aplikace usnadňují proces vývoje. Pomocí ViewBuilder lze pro operátora stroje vytvořit webové grafické uživatelské rozhraní.
SICK AppSpace je Engineering Framework systém pro individuální senzorové aplikace v němž může vývojář sám nebo společně s odborníky ze společnosti SICK vyvíjet individuální aplikace SensorApp pro své senzory na bázi Sick inteligentních softwarových nástrojů a algoritmů. SICK AppStudio je pak softwarový nástroj pro vyvíjení a programován individuálních zákaznických aplikací. Podporované programovací technologie zahrnují grafický Flow Editor a Lua Script pro vytváření senzorových aplikací. Integrované pomocné prostředky jako emulátor, debugger, zdrojový monitor a rozsáhlá dokumentace a demo aplikace usnadňují proces vývoje. Pomocí ViewBuilder lze pro operátora stroje vytvořit webové grafické uživatelské rozhraní.
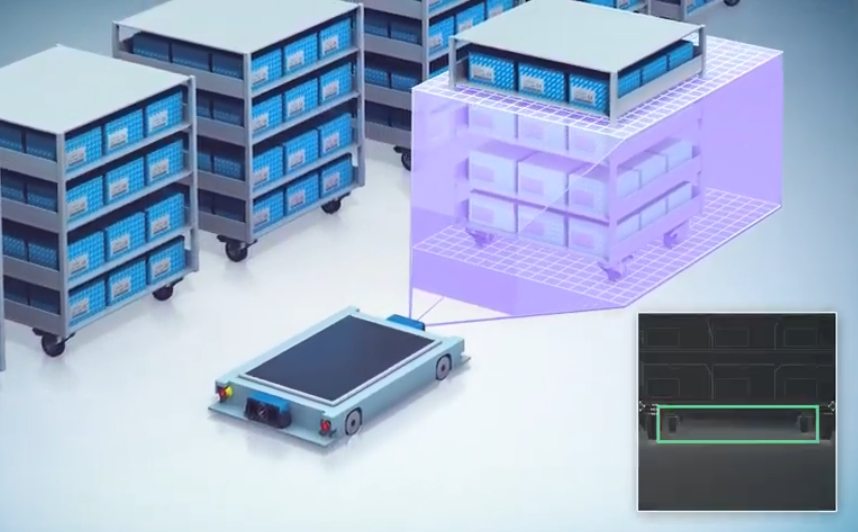
 Například pro úlohy AGV vozidel mohou být programovány / implementovány různé klíčové aplikace, jako jsou detekce palet nebo různých typů nosičů nákladu a jejich otvorů, detekce rohů vozíků, detekce nákladu apod. Naměřené XYZ souřadnice programovatelného senzoru pak lze například použít pro spouštění a zvedání prázdné nebo naložené palety na automatizovaném paletovém vozíku.
Například pro úlohy AGV vozidel mohou být programovány / implementovány různé klíčové aplikace, jako jsou detekce palet nebo různých typů nosičů nákladu a jejich otvorů, detekce rohů vozíků, detekce nákladu apod. Naměřené XYZ souřadnice programovatelného senzoru pak lze například použít pro spouštění a zvedání prázdné nebo naložené palety na automatizovaném paletovém vozíku.
Je také možné zkontrolovat obrysy nákladu, zda nevyčnívají nebo nepřesahují výšku, aby byla zajištěna spolehlivá přeprava a zasunutí do skladovacích prostroj či kontejnerů. V tomto směru SICK svým zákazníkům nabízí hotové klíčové aplikace jako kompletní softwarové řešení. Do budoucna bude k dispozici ještě více klíčových aplikací pro celou řadu různých aplikací.
Závěr
3D LiDARové senzory strojového vidění SICK Visionary-T představují pro intralogistiku zajímavé řešení jak pro různé situace varování před kolizí a podpory navigace, tak i pro detekci stavu nebo umístění nákladu. Jejich možnosti použití jsou však daleko rozsáhlejší, například v oblasti flexibilního navigovaní robotických ramen na různě dynamicky se pohybující předměty. Na tyto možnosti se však podíváme někdy příště.
Odkazy:
-
Webové stránky o 3D senzorech Visionary-T: https://www.sick.com/cz/cs/prumyslove-zpracovani-obrazu/3d-machine-vision/visionary-t/c/g358152
-
Webový odkaz na informace o aplikačním systému SICK AppSpace: https://www.sick.com/cz/cs/sick-appspace/c/g555725?q=:Def_Type:ProductFamily
-
Článek "Load detection and 3D collision warning for mobile intralogistics" na webu https://www.industry40news.com.au



