
Co je UAV 3D LiDAR?
 Pod označením UAV 3D LiDAR se prakticky skrývá tzv. bezpilotní letadlo (Unamanned Aerial Vehicle), dnes nejčastěji v podobě dronu, opatřeného snímacím laserovým skenerem (LiDARem) a případně multispektrální kamerou. Takové zařízení umožňuje buď s dálkovým řízením lidskou obsluhou nebo zcela automatickým pohybem provádět mapování zemského povrchu, zaměření profilu či povrchu předmětů a vytvářet z něho 3D model téměř libovolné konstrukce, struktury a povrchy pro potřeby modelování, údržby nebo výzkumu.
Pod označením UAV 3D LiDAR se prakticky skrývá tzv. bezpilotní letadlo (Unamanned Aerial Vehicle), dnes nejčastěji v podobě dronu, opatřeného snímacím laserovým skenerem (LiDARem) a případně multispektrální kamerou. Takové zařízení umožňuje buď s dálkovým řízením lidskou obsluhou nebo zcela automatickým pohybem provádět mapování zemského povrchu, zaměření profilu či povrchu předmětů a vytvářet z něho 3D model téměř libovolné konstrukce, struktury a povrchy pro potřeby modelování, údržby nebo výzkumu.
Samotné slovo LiDAR je zkratka z anglického „Light Detection And Ranging“, ale lze se setkat i s pojmy "Laser Imaging Radar" nebo "Laser-Instrument Distance and Range". Všechny dohromady pak více méně vyjadřují možnosti a schopnosti této metody.
Video popisují funkci LiDARu.
Proč v průmyslu využívat UAV 3D LiDAR?
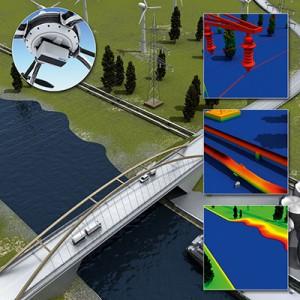
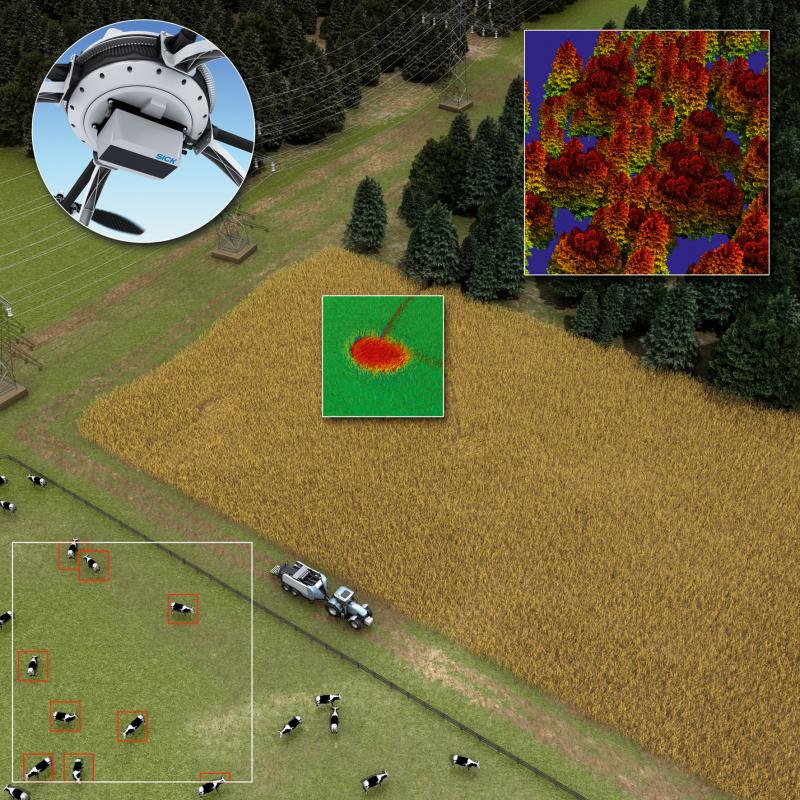
 Bezkontaktní plošná detekce a monitorování prostoru pomocí kamer a dronu se velmi dobře začíná uplatňovat nejen v umění, výzkumu, architektuře apod., ale i v průmyslu. Pomocí tzv. UAV 3D LiDAR senzoru v podobě samostatně letícího dronu opatřený LiDAR laser skenerem doplněný případně ještě multispektrální kamerou je možné snadno realizovat servisní kontroly, detekci nebo zaměření venkovních velkých průmyslových systémů a technologií bez nutnosti nákladného zapůjčení a provozu vrtulníku.
Bezkontaktní plošná detekce a monitorování prostoru pomocí kamer a dronu se velmi dobře začíná uplatňovat nejen v umění, výzkumu, architektuře apod., ale i v průmyslu. Pomocí tzv. UAV 3D LiDAR senzoru v podobě samostatně letícího dronu opatřený LiDAR laser skenerem doplněný případně ještě multispektrální kamerou je možné snadno realizovat servisní kontroly, detekci nebo zaměření venkovních velkých průmyslových systémů a technologií bez nutnosti nákladného zapůjčení a provozu vrtulníku.
Například lze detekovat či zaměřovat venkovní elektrická vedení a potrubí a jejich nosné konstrukce, listy a pláště větrných elektráren, provádět kontroly dálkových dopravníkových systémů v dolech, vysílačů a jejich nosné konstrukce atd. Stejně tak v dřevařském průmyslu lze UAV LiDAR systém využít pro snímání a vyhodnocení kvality stromů lesa v podobě přesného zaměření počtu a výšky stromů a jejich rozestupů pro následné rozhodnutí kdy, co a jakým systémem kácet. V těžařském průmyslu lze pomocí LiDAR dronu zaměřovat množství uhlí či kamení či naopak zaměřovat velikost vytěžené oblasti atd.
Sick LD-MRS multi-layer laser scanner pro LiDAR
 Společnosti Sick již dříve vyvinula pro automobilový průmysl "LD-MRS multi-layer laser scanner".
Společnosti Sick již dříve vyvinula pro automobilový průmysl "LD-MRS multi-layer laser scanner".
Toto optické zařízení provádí zaměření vzdálenosti povrchu pomocí úhlově horizontálně rozmítaných vysílaných pulsů světelných paprsků laseru, které jsou po odrazu od povrchu snímaného povrchu či předmětu opět zachyceny přijímačem skeneru. Následně ze změřených dob jejich letu (systém ToF = Time of Flight) se vyhodnocuje vzdálenost povrchu od čela skeneru. Z tisíců až miliónů těchto hodnot se pak vymodeluje / vykreslí model povrch objektu či povrchu.
Video popisují princip funkce LiDAR laser skeneru s měřícím systémem Time-of-Flight.
 Pro potřeby UAV 3D LiDARu pak Sick provedl úpravu a optimalizaci skeneru pro potřeby upevnění na drony a použití ve venkovním prostředí. To primárně znamenalo výrazně snížit hmotnost pro možnost upevnění i na středně velké drony, snížit spotřebu elektrické energie pro dlouhodobé napájení z akumulátoru a výrazně zvýšit krytí pouzdra pro vysokou dlouhodobou odolnost proti prachu a vodě.
Pro potřeby UAV 3D LiDARu pak Sick provedl úpravu a optimalizaci skeneru pro potřeby upevnění na drony a použití ve venkovním prostředí. To primárně znamenalo výrazně snížit hmotnost pro možnost upevnění i na středně velké drony, snížit spotřebu elektrické energie pro dlouhodobé napájení z akumulátoru a výrazně zvýšit krytí pouzdra pro vysokou dlouhodobou odolnost proti prachu a vodě.
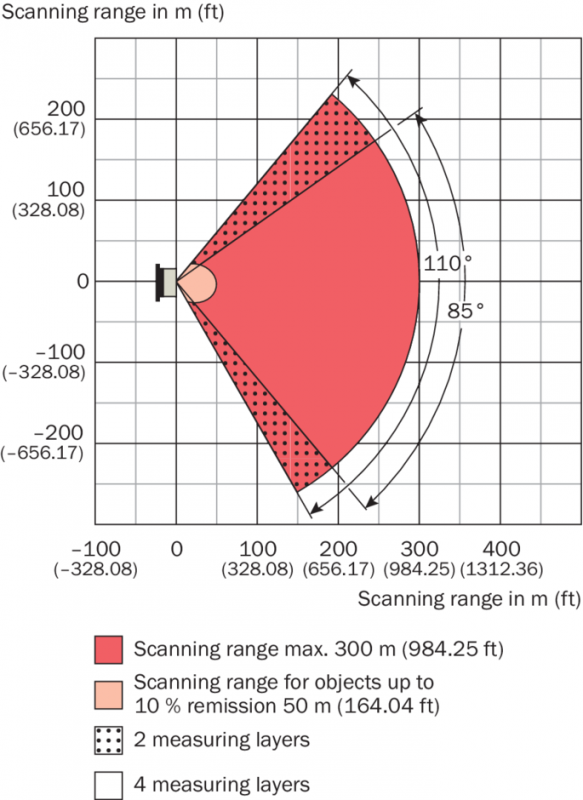
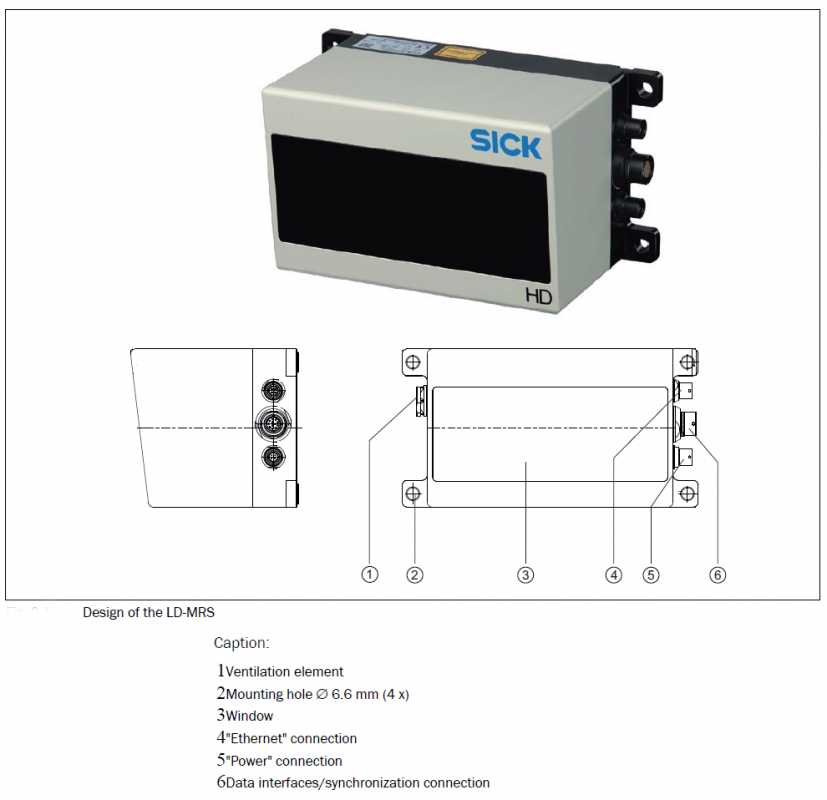
Ve výsledku tak společnost Sick vyvinula pouze 770 g těžký LD-MRS laserový skener s vysokým rozlišením zapouzdřený s krytím IP77 s produktovým označením LD-MRS420201. Ve spojení s dronem tak vznikl 4-vrstvý UAV 3D LiDAR senzor se snímacím dosahem od 0,5 až do 300 m a s horizontálním úhlem záběru 85° s rozlišením 0,125° až 0,5°.
Označení 4-vrstvý pak znamená, že skener je vybaven technologií i současného vyhodnocování tzv. 4 vrstev ve vertikálním směru v rozsahu -1,8° až 1,8° (tedy na kolmém na hlavní skenovací horizontální prostor). Toto řešení slouží podobnému účelu jako digitální stabilizace obrazu u digitálních fotoaparátů. Zde kompenzuje nežádoucí "kolébavý" pohyb ve vertikálním směru, který nastává například u vozidel při jejich brzdění nebo akceleraci nebo u dronů při větrných poryvech. V režimu automatického sledování pohyblivých předmětů (object tracking), který umožňuje "držet se" zvoleného zaměřeného objektu definovaného tvaru a monitorovat tak jeho pohyb, pak funkce 4-vrstev pomáhá udržet "zaměření" pohybujícího se objektu během prudkých manévrů.
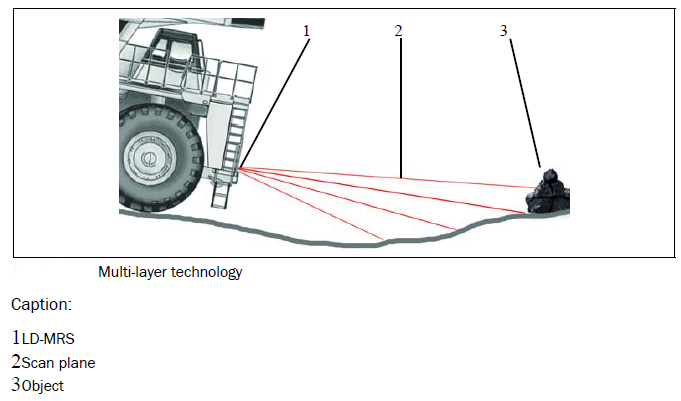
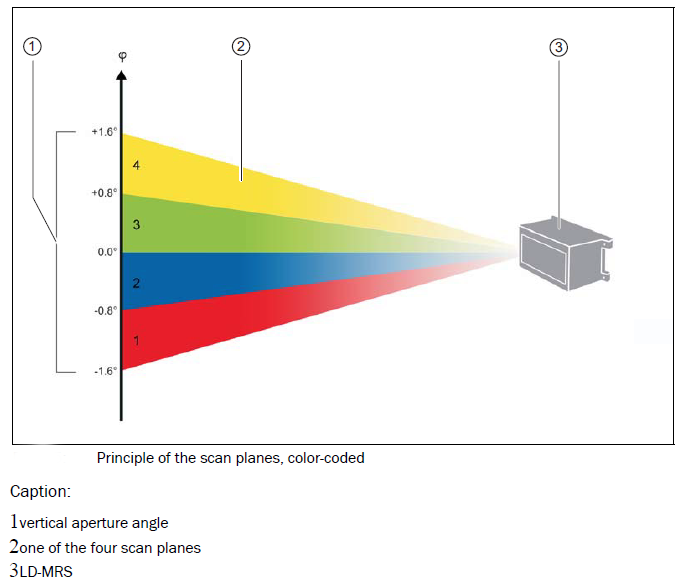
4-vrstvá technologie umožňuje kompenzovat (vyrovnávat) výkyvy skeneru ve směru kolmém na směr skenování vzniklé při pohybu (například při brzdění a rozjezdu vozidla nebo při poryvech větru u dronů).
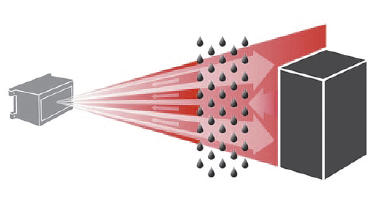 Další "vychytávkou" pro zvýšení spolehlivosti měření je tzv. multipuls / multi-echo snímání. Zde elektronika skeneru čeká u každého vyslaného pulsu světelného paprsku na zachycení /detekci až 3 různých odrazů (tedy 3 různých časová zpoždění od doby vyslání pulsu) pro vyhodnocení a možné eliminace nežádoucích částečných odrazů, například od vodní kapek, od průhledného krytu apod. Až třetí zjištěný odraz tak může být od detekovaného neprůhledného povrchu předmětu či podkladu.
Další "vychytávkou" pro zvýšení spolehlivosti měření je tzv. multipuls / multi-echo snímání. Zde elektronika skeneru čeká u každého vyslaného pulsu světelného paprsku na zachycení /detekci až 3 různých odrazů (tedy 3 různých časová zpoždění od doby vyslání pulsu) pro vyhodnocení a možné eliminace nežádoucích částečných odrazů, například od vodní kapek, od průhledného krytu apod. Až třetí zjištěný odraz tak může být od detekovaného neprůhledného povrchu předmětu či podkladu.
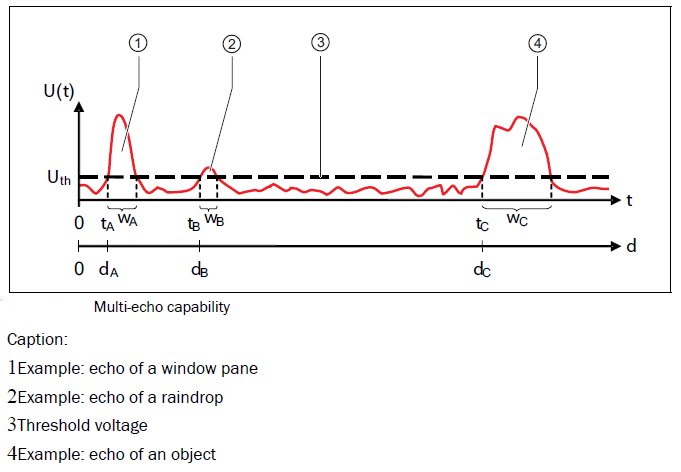
Příklad výstupního signálu optického přijímače laserového skeneru při příjmu dvou částečných odrazů laserového paprsku před přijetím třetího finálního signálu odrazu od předmětu.
Skener se také vyznačuje vysokou citlivostí i na černé málo odrazné předměty. Například černé předměty s jen 10% odrazem světla od jejich povrchu lze detekovat/zaměřovat až ze vzdálenosti 50 m. Přesnost měření / skenování vzdálenosti povrchu je +/- 300 mm při nastavitelné skenovací frekvenci od 12,5 Hz do 50 Hz.
Nízká elektrický příkon jen 8 W z el. zdroje napětí 9 až 24V umožňuje snadný a dlouhodobý provoz na akumulátor. Provozní teplotní rozsah -40 až +70°C umožňuje použít v každé roční době nebo na většině míst na světě. Pro napojení a komunikaci s řídící jednotkou dronu slouží CAN a Ethernetové TCP/IP rozhraní.
Ukázková videa obecné funkce a výstupů z UAV LiDARu
Ukázky funkce skenování prostoru UAV 3D LiDARem.
Závěr
Průmyslové zaměřování a monitorování pomocí UAV 3D LiDARu jistě v budoucnu najde mnoho uplatnění a výrazně tak zjednoduší plánování a koordinování prací nebo provádění servisu venkovních zařízení.
Odkazy:
- Stránky společnosti Sick GmbH o LD-MRS multi-layer laser scanneru: https://www.sick.com/ag/en/detection-and-ranging-solutions/3d-lidar-sensors/ld-mrs/ld-mrs420201/p/p496644
- PDF manuál skeneru LD-MRS420201: https://www.sick.com/media/docs/3/03/803/Operating_instructions_LD_MRS_3D_LiDAR_sensors_en_IM0032803.PDF



