
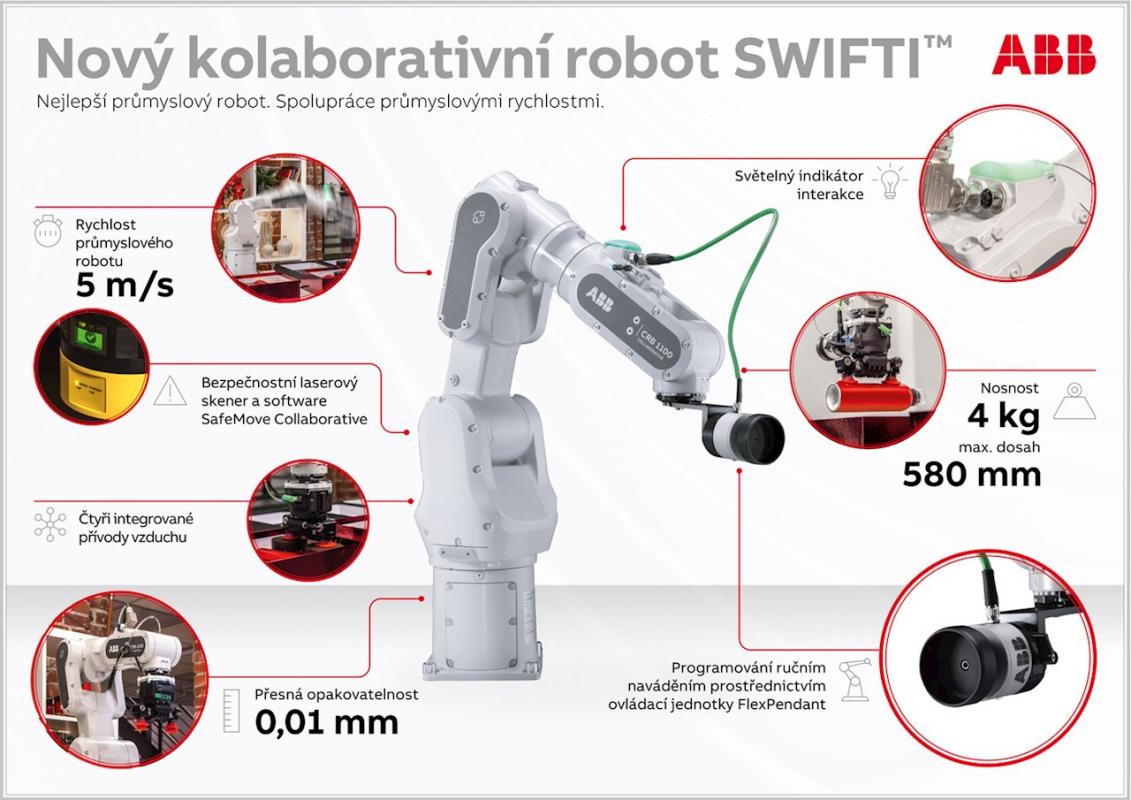
Kolaborativní robot 1100 SWIFTI vychází ze špičkového průmyslového robotu IRB 1100, který ve své kategorii nabízí vynikající rychlost i přesnost. K jeho přednostem patří nosnost do 4 kg, dosah do 580 mm, bezpečný kolaborativní provoz a snadná obsluha. Díky němu se otevírají nové možnosti, jak zvýšit produktivitu v široké škále výrobních a logistických aplikací i jak v mnoha nových odvětvích zavést pokročilou automatizaci. SWIFTI disponuje maximální rychlostí TCP (středový bod nástroje) více než 5 metrů za vteřinu, tedy pětkrát vyšší rychlost, než je běžné u kolaborativních robotů této kategorie. Z tohoto hlediska dosahuje stejných parametrů jako běžný průmyslový robot. Je navržen tak, aby umožnil úzkou a bezpečnou spolupráci člověka a robotu. Dokáže se pohybovat vysokou rychlostí, čímž umožňuje maximalizovat produktivitu, aniž by představoval nebezpečí pro své okolí.
SWIFTI je primárně vhodný pro montáže a lze ho využít v situacích, kdy musejí pracovníci provádět kontrolu či ručně manipulovat díly. Tyto aplikace tradičně vyžadují rozsáhlá bezpečnostní opatření jako např. oplocení, aby se kontakt pracovníka a robotu vyloučil. Vyžaduje-li výrobní proces opakovanou přítomnost pracovníka v prostoru robotu, musí být robot bezpečně zastaven. Tradiční řešení předpokládá větší zástavbový prostor pracoviště, zvýšené náklady v důsledku nutnosti bezpečného zastavení robotu, a tedy snížení produktivity výroby. Více informací o kolaborativních robotech SWIFTI naleznete na https://cobots.robotics.abb.com/en/robots/swifti/
Bezpečnost
Díky integraci bezpečnostního laserového skeneru s bezpečnostním softwarem ABB SafeMove je zabráněno možné kolizi pracovníka a pohybujícího se robotu. Tato technologie umožňuje bezpečnou spolupráci bez nutnosti použití fyzické bariéry. Pokud v pracovním prostoru robotu SWIFTI je detekován operátor, pohyb robotu se automaticky zpomalí nebo úplně zastaví, aby se pracovník mohl k robotu bezpečně přiblížit. Jakmile se pracovník vzdálí a robot rozpozná, že jeho pracovní prostor není narušen, znovu zahájí činnost dle programu při využití maximální rychlosti. SWIFTI je vybaven indikátorem stavu interakce, který vizuálně signalizuje míru přítomnosti obsluhy v pracovním prostoru robotu.
Další výhodou kolaborativního designu tohoto robotu je snadné ovládání a instalace. Bezpečné pracovní zóny robotu lze snadno nastavit pomocí jednoduchého a rychlého nástroje SafeMove, včetně SafeMove Configurator App, na přenosném ručním ovladači ABB FlexPendant.
Programování
SWIFTI nabízí uživatelům na výběr jak programování ručním přesným ovladačem FlexPendant, tak pomocí nového softwaru ABB Wizard Easy Programming, který sestává z jednoduchých grafických bloků, jež napomáhají zákazníkům snadno automatizovat jejich aplikace. Bloky představují akce jako “přesun do polohy”, “zvednutí předmětu” a “opakování pohybu”. Tímto způsobem může zákazník snadno a intuitivně vytvořit řadu jednoduchých procesů, které robot může provádět. Kromě toho zahrnuje i funkce pro řešení potíží, jež začínajícím programátorům umožní eliminovat chyby, jako jsou kolize. Zákazníci se tedy nemusejí učit složité programovací jazyky. Funkce, které mají k dispozici, výrazně snižují čas, úsilí a možnost chyb, jež mnoho společností, zejména malých a středních, od investice do robotické automatizace odrazují.
Každá instalace kolaborativního robotu zahrnuje spouštěcí balíček, který poskytuje přístup k službě zákaznické podpory a kompletní řadě digitálních řešení ABB Ability, jež nabízí monitorování a diagnostiku robotu po dobu prvních šesti měsíců. Zákazníci tak mohou využít odborné technické služby, které nabízejí podporu napříč všemi průmyslovými segmenty.
Klíčové vlastnosti CRB 1100
- Nosnost 4 kg a dosah 475 mm nebo 580 mm.
- Vysoký výkon – rychlost průmyslového robotu až do 5 metrů za vteřinu. (Bezpečná rychlost při kolaborativních aplikací může být nižší v závislosti na konkrétní aplikaci, nástrojích, nosnosti atd. Uživatelé mohou hledat nastavení optimální rychlosti v SafeMove Configurator App. Uživatelé by vždy měli provádět analýzu rizik své robotické aplikace.)
- Přesnost / opakovatelné najetí do bodu 0,01 mm.
- Malá zástavbová plocha, nízká hmotnost a možnost montáže v jakémkoli úhlu.
- Řídicí systém OmniCore a ruční programovací jednotka FlexPendant.
- Čtyři integrované přívody vzduchu na robotu.
- ISO příruba pro snadnou montáž nástrojů.
- Bezpečnostní laserový skener a software SafeMove Collaborative (při připojení laserového skeneru může být vyžadován bezpečnostní PLC).
- Světelný indikátor signalizující míru interakce kolaborativního robotu.
- SafeMove Congigurator App na ovládací jednotce FlexPendant.
- Bezpečnostní úroveň PL d Cat 3.
- Stupeň krytí IP40.
- Snadné ovládání: rychlá kalibrace a konfigurace.
- Snadné programování: Wizard Easy Programming.
- Snadná instalace: Programování ručním naváděním prostřednictvím ovládací jednotky FlexPendant.
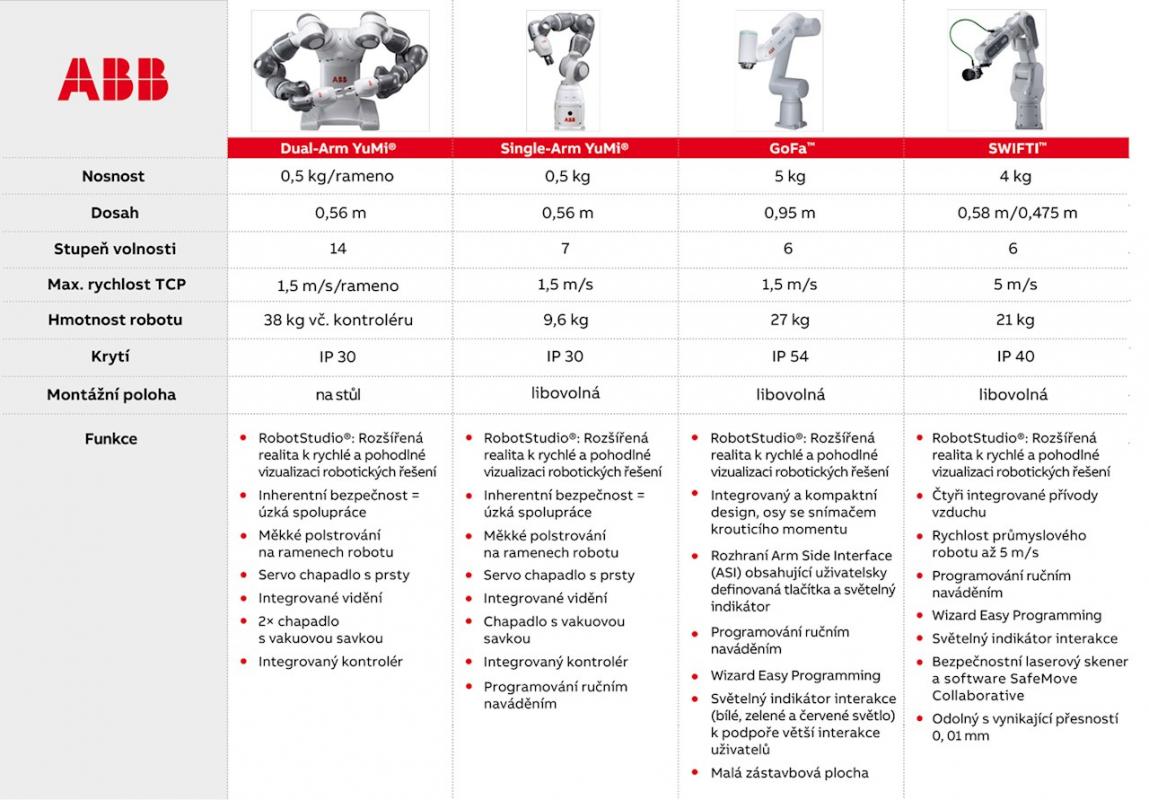
Portfolio kolaborativních robotů
Příklady použití kolaborativního robotu SWIFTI



