 Na první pohled je pro laika oblast zemědělství asi nejvíce vzdálená a nejméně ovlivněná moderními technologiemi a automatizací. Ale v současnosti opak je pravdou a do budoucna se automatizaci a robotizaci zemědělství přisuzuje jedno z nejdynamičtějších vývojů a to nejen při zpracování plodin, což je dnes již dost běžné, ale i přímo na při samotném pěstování na polích. Do hry se totiž mají významně zapojit "armáda" nových přesnějších a odolnějších snímačů pro monitorování, které ve spojení s výkonnějšími řídícími jednotkami umožňují automaticky nebo poloautomaticky řídit stávající typy zemědělských strojů.
Na první pohled je pro laika oblast zemědělství asi nejvíce vzdálená a nejméně ovlivněná moderními technologiemi a automatizací. Ale v současnosti opak je pravdou a do budoucna se automatizaci a robotizaci zemědělství přisuzuje jedno z nejdynamičtějších vývojů a to nejen při zpracování plodin, což je dnes již dost běžné, ale i přímo na při samotném pěstování na polích. Do hry se totiž mají významně zapojit "armáda" nových přesnějších a odolnějších snímačů pro monitorování, které ve spojení s výkonnějšími řídícími jednotkami umožňují automaticky nebo poloautomaticky řídit stávající typy zemědělských strojů.
Ve vzdálenější budoucnosti pak navíc lze počítat se stále větším užíváním létajících jednotek v podobě poloautomatických nebo pak i plně automatických UAV / dronů, které budou schopni zajistit zvláště na rozsáhlých polích mnoho práce bez jakéhokoliv kontaktu se zemí a tedy bez jakéhokoliv poškození pěstovaných rostlin i jejich půdy.
1) Současné možnosti autonomních automatických pracovních strojů
 Vývoj mobilních pracovních strojů (souprav traktor + pracovní nástroj, postřikovač, kombajn či sklízecí řezačka) se postupně a nezadržitelně ubírá k plně automatizovaným autonomním zemědělským strojům, kde již jejich uživatel jen provede kompletní nastavení pohybu v počítači na farmě, odešle data bezdrátově do traktoru a případně k němu připojených inteligentních zařízení. Následně jej pak již jen řidič doveze na pozemek, zapne příslušný automatický pracovní režim a stroj by již v rámci zadaného pole pracoval zcela samostatně. Již dnes jsou i v Česku v provozu další systémy, které umí okamžitě rozpoznat stav porostů a řídit on-line variabilní dávkování hnojiv podle potřeb rostlin. Více na: https://www.euro.cz/byznys/traktory-nepotrebuji-ridice-897306#utm_medium=selfpromo&utm_source=euro&utm_campaign=copylink
Vývoj mobilních pracovních strojů (souprav traktor + pracovní nástroj, postřikovač, kombajn či sklízecí řezačka) se postupně a nezadržitelně ubírá k plně automatizovaným autonomním zemědělským strojům, kde již jejich uživatel jen provede kompletní nastavení pohybu v počítači na farmě, odešle data bezdrátově do traktoru a případně k němu připojených inteligentních zařízení. Následně jej pak již jen řidič doveze na pozemek, zapne příslušný automatický pracovní režim a stroj by již v rámci zadaného pole pracoval zcela samostatně. Již dnes jsou i v Česku v provozu další systémy, které umí okamžitě rozpoznat stav porostů a řídit on-line variabilní dávkování hnojiv podle potřeb rostlin. Více na: https://www.euro.cz/byznys/traktory-nepotrebuji-ridice-897306#utm_medium=selfpromo&utm_source=euro&utm_campaign=copylink
Základní výhodou pro automatizaci práce na polích, například proti v současné době tolik diskutované dopravě, je jednak stabilní pozice a přesně dané rozměry každé obdělávané plochy, což usnadňuje základní orientaci strojů. Dále pak i přímá viditelnost na nebe, což umožňuje využití i satelitní navigace pro zjišťování a řízení polohy automatických strojů (například proti stíženému řízení v halách). Díky těmto předpokladům se již dnes u nejmodernějších traktorů setkáváme s režimy automatického pojezdu a orientace na poli bez nutnosti řízení.
 Tzv. systémy automatického řízení nabízí výrobci traktorů již plně integrované do stroje a zabudované již v průběhu jeho výroby a ovládání systému je integrováno do ovládacího terminálu traktoru. Ten znázorňuje polohu stroje na pozemku, jeho dráhu, zpracovanou nebo ošetřenou plochu a ovládá další funkce přípojných zemědělských strojů, zejména autopilota, po jehož připojení řidič pouze zadá parametry stroje, zaznamená první průjezd po pozemku a autopilot pak již stroj řídí bez zásahu řidiče. Člověk pouze kontroluje rychlost pojezdu, práci přípojného nářadí a sleduje překážky, ale do řízení nezasahuje. Systém automatického řízení traktorů dnes již plně zvládá nejen přímou jízdu, ale i automatické otočení traktoru na souvratích, čímž je systém pojezdu dnes již kompletně automatizován. Více na: https://www.euro.cz/byznys/traktory-nepotrebuji-ridice-897306#utm_medium=selfpromo&utm_source=euro&utm_campaign=copylinkSystém obvykle automaticky ovládá řízení předních kol a při dopředné jízdě (bez couvání) plynule samočinně dojede do další jízdy. Nejprve do ní navede traktor a poté nářadí. Řidič si případně může nastavit způsob otáčení traktoru při závěrečném zpracovávání souvratí.
Tzv. systémy automatického řízení nabízí výrobci traktorů již plně integrované do stroje a zabudované již v průběhu jeho výroby a ovládání systému je integrováno do ovládacího terminálu traktoru. Ten znázorňuje polohu stroje na pozemku, jeho dráhu, zpracovanou nebo ošetřenou plochu a ovládá další funkce přípojných zemědělských strojů, zejména autopilota, po jehož připojení řidič pouze zadá parametry stroje, zaznamená první průjezd po pozemku a autopilot pak již stroj řídí bez zásahu řidiče. Člověk pouze kontroluje rychlost pojezdu, práci přípojného nářadí a sleduje překážky, ale do řízení nezasahuje. Systém automatického řízení traktorů dnes již plně zvládá nejen přímou jízdu, ale i automatické otočení traktoru na souvratích, čímž je systém pojezdu dnes již kompletně automatizován. Více na: https://www.euro.cz/byznys/traktory-nepotrebuji-ridice-897306#utm_medium=selfpromo&utm_source=euro&utm_campaign=copylinkSystém obvykle automaticky ovládá řízení předních kol a při dopředné jízdě (bez couvání) plynule samočinně dojede do další jízdy. Nejprve do ní navede traktor a poté nářadí. Řidič si případně může nastavit způsob otáčení traktoru při závěrečném zpracovávání souvratí.
S amotné řízení kol pro uvedenou autonomní jízdu mobilních pracovních strojů se obvykle realizuje řídící jednotkou prostřednictvím snímání a regulace válce řízení traktoru, sklízecího kombajnu či řezačky, ve kterém je mimo akčního prvku elektromotoru integrován i přesný absolutní lineární enkodér, který snímá jeho pozici. Řídící jednotka stroje tak mám neustále přesné informace o aktuálním natočení kol, což je základní údaj potřebný k definování, kam stroj ve skutečnosti následující metry pojede. Pro přesné a odolné snímání rychlosti náprav se pak obvykle využívají robustní indukční snímače.
amotné řízení kol pro uvedenou autonomní jízdu mobilních pracovních strojů se obvykle realizuje řídící jednotkou prostřednictvím snímání a regulace válce řízení traktoru, sklízecího kombajnu či řezačky, ve kterém je mimo akčního prvku elektromotoru integrován i přesný absolutní lineární enkodér, který snímá jeho pozici. Řídící jednotka stroje tak mám neustále přesné informace o aktuálním natočení kol, což je základní údaj potřebný k definování, kam stroj ve skutečnosti následující metry pojede. Pro přesné a odolné snímání rychlosti náprav se pak obvykle využívají robustní indukční snímače.
Nicméně satelitní navigace není jediným prostředkem pro určení polohy a regulací řízení pohybu. Za prvé její přesnost ve stanovení polohy se mění s aktuálními povětrnostními podmínkami a chyba může být až 3 metry a navíc správné autonomní zemědělské vozidlo by mělo umět zcela pružně reagovat na aktuální stav porostu pole a tomu jízdu primárně přizpůsobovat. To samozřejmě ze signálů ze satelitů zjistit nelze, a proto je nutné řídící jednotce dodat i informace o aktuální stavu prostředí okolo traktoru.
 K tomu dnes slouží moderní systémy automatického vedení po konturách / automatického vedení řádků a varování před kolizí. Ty obvykle pracuje na bázi laserového skeneru a zjišťuje pozici a výškový profil terénu či řádků. Systém pak vypočítá požadovanou trajektorii, ve které lze automaticky vést soupravu traktoru a příslušného nástroje, například v podobě polního postřikovače nebo balíkovacího lisu. V případě balíkovacího lisu například nepřetržitě zjišťuje objem řádků, což například i umožňuje automatickou regulaci rychlosti pro optimální objemový tok, aby balíkovací lis mohl pracovat s optimálním výkonem. Díky současné moderní s inteligentní senzorice s integrovaným aplikačním softwarem se snímaná surová data vyhodnocují společně s daty vozidel již v senzoru.
K tomu dnes slouží moderní systémy automatického vedení po konturách / automatického vedení řádků a varování před kolizí. Ty obvykle pracuje na bázi laserového skeneru a zjišťuje pozici a výškový profil terénu či řádků. Systém pak vypočítá požadovanou trajektorii, ve které lze automaticky vést soupravu traktoru a příslušného nástroje, například v podobě polního postřikovače nebo balíkovacího lisu. V případě balíkovacího lisu například nepřetržitě zjišťuje objem řádků, což například i umožňuje automatickou regulaci rychlosti pro optimální objemový tok, aby balíkovací lis mohl pracovat s optimálním výkonem. Díky současné moderní s inteligentní senzorice s integrovaným aplikačním softwarem se snímaná surová data vyhodnocují společně s daty vozidel již v senzoru.
 Například lze konkrétně jmenovat senzorový systém Sick WGS Pro, který pracuje na bázi 2D laserového skeneru TiM a umí sám o sobě zjišťovat trajektorie řádku (průběh řádku) a zobrazení absolutní polohy řádku pro automatickou příčnou regulaci, zobrazení objemu řádku pro automatickou regulaci rychlosti a pomocí integrovaného modelu vozidla provádět výpočet správného vlastního pohybu.
Například lze konkrétně jmenovat senzorový systém Sick WGS Pro, který pracuje na bázi 2D laserového skeneru TiM a umí sám o sobě zjišťovat trajektorie řádku (průběh řádku) a zobrazení absolutní polohy řádku pro automatickou příčnou regulaci, zobrazení objemu řádku pro automatickou regulaci rychlosti a pomocí integrovaného modelu vozidla provádět výpočet správného vlastního pohybu.
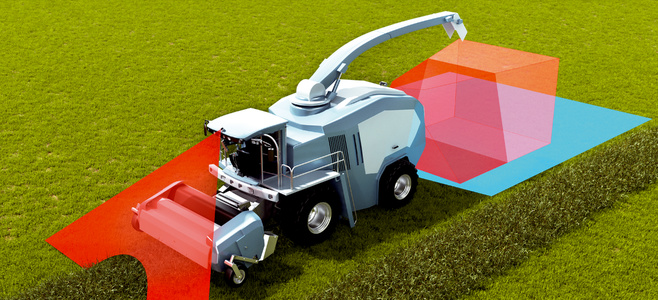
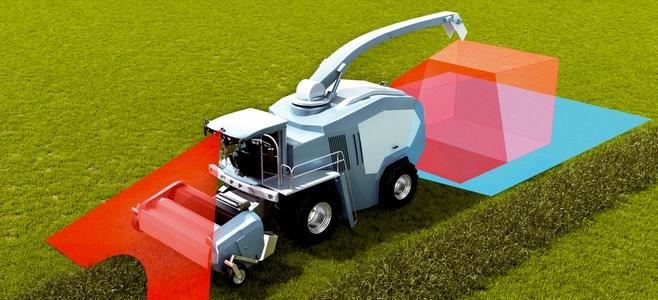
 Naopak při manévrování v mrtvém úhlu a při couvání může například v zadním prostoru sklízecí řezačky rychle dojít ke kolizím s objekty. Pro zamezení těmto škodám se pak může použít inteligentní 3D asistenční systém s 2D kamerovým senzorem Sick Visionary-B, který poskytuje reálný obraz s optickými a akustickými výstražnými signály. I při silném slunečním záření nebo dešti spolehlivě pomáhá operátorovi sklízecí řezačky při detekci objektů v slepých zónách okolo vozidla a v kritických jízdních situacích může varovat operátora či případně i automaticky zastavit funkci stroje.
Naopak při manévrování v mrtvém úhlu a při couvání může například v zadním prostoru sklízecí řezačky rychle dojít ke kolizím s objekty. Pro zamezení těmto škodám se pak může použít inteligentní 3D asistenční systém s 2D kamerovým senzorem Sick Visionary-B, který poskytuje reálný obraz s optickými a akustickými výstražnými signály. I při silném slunečním záření nebo dešti spolehlivě pomáhá operátorovi sklízecí řezačky při detekci objektů v slepých zónách okolo vozidla a v kritických jízdních situacích může varovat operátora či případně i automaticky zastavit funkci stroje.
 U zařízení polních postřikovačů může být systém řízení doplněn například o ultrazvuková čidla pro režim plně automatickému vedení tyčí. Senzory slouží k dodržování správné vzdálenosti polních postřikovačů např. u porostů se značně odlišnou výškou vzrůstu a u různých profilů terénu. Snímače náklonu pak slouží k nivelaci tyčí. Při různých profilech terénu lze např. díky senzoru nastavit náklon tyčí. Ve spojení s laserovým skenerem pak systém i může umět okamžitě rozpoznat stav porostů a řídit operativně v reálném čase variabilní dávkování hnojiv podle potřeb rostlin.
U zařízení polních postřikovačů může být systém řízení doplněn například o ultrazvuková čidla pro režim plně automatickému vedení tyčí. Senzory slouží k dodržování správné vzdálenosti polních postřikovačů např. u porostů se značně odlišnou výškou vzrůstu a u různých profilů terénu. Snímače náklonu pak slouží k nivelaci tyčí. Při různých profilech terénu lze např. díky senzoru nastavit náklon tyčí. Ve spojení s laserovým skenerem pak systém i může umět okamžitě rozpoznat stav porostů a řídit operativně v reálném čase variabilní dávkování hnojiv podle potřeb rostlin.
Více na: https://www.euro.cz/byznys/traktory-nepotrebuji-ridice-897306#utm_medium=selfpromo&utm_source=euro&utm_campaign=copyV případě postřikovačů v ovocnářství se pro optimalizaci aplikace využívají ultrazvukové senzory pro detekci a vyhodnocení parametrů skutečného porostu, jako například různé rozestupy stromů, jejich výšky vzrůstu a mezery, které často snižují účinnost. Například pro tyto aplikace navržení snímače Sick UC30 se snímací vzdáleností až 8 m umožňují spolehlivou aktivaci stříkacích trysek nebo i například automatickému odpojení/připojení aplikace na souvrati. Senzor tak zajišťuje efektivnější aplikaci postřikového přípravku i v automatickém autonomním režimu.


Ukázka použití ultrazvukových snímačů Sick pro detekci výšky a vzdálenosti porostu pro efektivní regulaci postřikování.
2) Co by bylo možné realizovat pomocí UAV/dronů?
 Zatímco výše popsaná situace s kolovými zemědělskými stroji již je zcela aktuální, použití létajících prostředků je stále ještě v praxi hra budoucnosti. Nicméně vývoj k tomu zcela jistě směřuje, když technologicky již v cestě tomuto systému využití skoro nic nebrání, ale překážky jsou spíše z pohledu zákonů a zvyků.
Zatímco výše popsaná situace s kolovými zemědělskými stroji již je zcela aktuální, použití létajících prostředků je stále ještě v praxi hra budoucnosti. Nicméně vývoj k tomu zcela jistě směřuje, když technologicky již v cestě tomuto systému využití skoro nic nebrání, ale překážky jsou spíše z pohledu zákonů a zvyků.
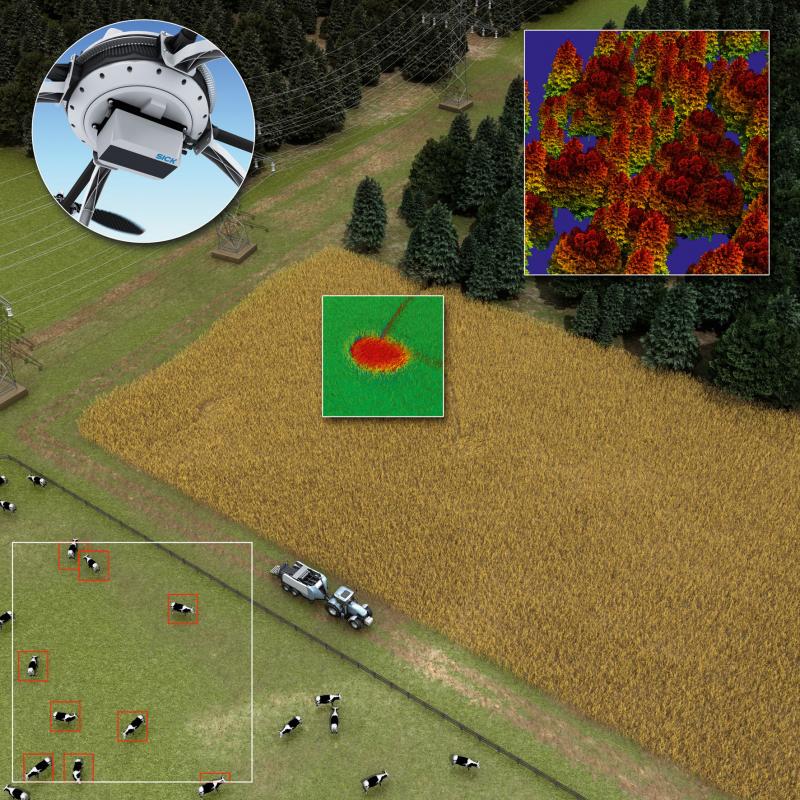
Je jasné, že hlavní úkony, jako například orání, setí či sklizeň plodin asi zůstane doménou po zemi se pohybujících kolových strojů. Nicméně zvláště v případě cíleného zavlažování, hnojení či hubení škůdců může být automatická autonomní létající zařízení velmi efektivní. Mohou totiž snadněji a přesněji laserovým skenery či kamery monitorovat výšku porostu, jeho vlhkost, barvu, i místní poškození a následně například selektivně pohnojením, postřikem či zavlažením zasáhnout přesně na potřebném místě bez jakéhokoliv poškození okolí. Technologie snímání povrchu půdy i porostu jsou již dnes velmi vyspělé a známé i pod označením LiDAR (viz. článek UAV 3D LiDAR i pro průmysl).
Pro zemědělské potřeby by samozřejmě bylo nutné využívat robustnějších dronů pro potřeby dostatečné nosné kapacity pro postřikové a zavlažovací kapaliny či případné další zemědělské nástroje, ale principiálně se na technologii nic nemění. Dá se říct, že takový létající prostředek může pro velké, ale i malé farmáře a zemědělce představovat to, co za socialistické doby velkých lánů prováděla běžně práškovací letadla, které se dnes z logických ekonomických důvodů již prakticky nevyužívají.

3) Možnosti použití chytrých senzorů / IoT v polnohospodářství
Dnes populární oblast IoT, který se zatím aktuálně převážně profiluje v podobě systémů automatického kontinuálního měření a bezdrátové komunikace s může hodit i v oblastí polního zemědělství. Do země zasunuté bezdrátové snímače teploty, vlhkosti a složení půdy mohou sloužit k průběžného monitorování stavu pole po stránce vhodných podmínek růstu rostlin, přičemž řídící jednotka, která bude průběžné informace od mnoha senzorů z různých částí pole vyhodnocovat, může zajistit vhodné zavlažování či pohnojení. Ať již přivoláním "živého" zemědělce tím, že mu pošle informační správu, co se s jeho polem XY děje, či tím, že sama spustí na poli pevně instalovaná postřiková zařízení. V případě budoucí větší automatizace pak již asi sama dá povel k vyslání příslušných autonomních pojízdných či létajících strojů pro provedení nápravy vzniklé situace, tedy například pro provedení zavlažení, pohnojení, odplevelení atd.
V případě nízké ceny takových monitorovacích bezdrátových jednotek by bylo možné použít jich i poměrně velké množství pro monitorování jednotlivých částí velkého pole, přičemž z pohledu odolnosti proti povětrnostním podmínkách i rukou nenechavců by mohly být zasunuty pod povrch pole (do hlíny) a jen malá anténa by "čouhala" ze země. Malá spotřeba IoT snímačů umožňuje napájení z baterie pro celý rok, aniž by bylo nutné během jednoho cyklu osetí - sklizeň je ze země vyndavat.
Závěr
Masivní automatizace se projevuje ve všech odvětvích průmyslu, zemědělství z toho nevyjímaje. Zvláště v oblasti potravinářské produkce pak bude v budoucnosti velmi zajímavé, kam se bude automatizace ubírat, protože v této oblasti se může nesnadněji uplatnit díky snadné předvídatelnosti a relativně pomalému růstu (na rozdíl od chovu zvířat). Zda postupně autonomní roboti (stroje) zcela nahradí lidskou sílu a práci a prakticky již nebude v potravinářské produkci lidí potřeba nebo z nějakého důvodu nikoliv. Osobně si troufám říci, že v oblasti velkoprodukce tomu tak bude, nicméně je otázkou, do jaké míry bude využívána u středních a malých farmářů.
Vývoj, dle mého názoru, směřuje k tomu, že v supermarketech budou nabízeny právě pouze ty automaticky vypěstované produkty pro hlavní nakrmení "lidské masy" (což je do jisté míry už i současná realita) a současně zde zůstane prostor pro neautomatizované či jen málo automatizované tzv. biofarmaření spojené s agroturistikou. Zde si například lidé budou moci v rámci zaplaceného relaxačního víkendu sami natrhat ovoce a zeleninu, vylisovat si svůj mošt, vytrhat si vlastní salát, mrkev, cibuli atd.
Odkazy:
- Web společnosti Sick GmbH - prezentace "Efektivně na cestách: automatizace začíná být mobilní": https://www.sick.com/cz/cs/mobile-applications/w/mobile-applications/
- Článek "Traktory nepotřebují řidiče" na webu: https://www.euro.cz/byznys/traktory-nepotrebuji-ridice-897306
- Článek "O krok dále v automatizaci pojezdu": http://mechanizaceweb.cz/o-krok-dale-v-automatizaci-pojezdu/
- Článek "UAV 3D LiDAR i pro průmysl" na serveru automatizace.hw.cz.
- Článek "Budoucnost automatizace průmyslové výroby" na serveru automatizace.hw.cz.
- Článek "Budoucnost automatizace regulace dopravy" na serveru automatizace.hw.cz.



