Indukční senzory přiblížení jsou všeobecně docela známé i používané v široké oblasti průmyslové automatizace. Ne však vždy, když stojíme před řešením nějakého problému, nás hned napadne vhodný snímač k použití. V následujícím článku ukazuje případy, po které se hodí použití indukčních senzorů přiblížení s analogovým výstupem.


 Už
i na HW serveru, resp. serveru automatizace.HW.cz,
lze najít několik článků, týkající se indukčních senzorů přiblížení (Indukční
senzory přiblížení - obecný popis, Indukční
senzory s analogovým výstupem od Carlo Gavazzi). Ty se však hlavně věnují
principu funkce těchto senzorů nebo popisu jejich parametrů, ale je v nich málo
informací o tom, kdy a v jakých případech je lze použít. Toto zkusím napravit
v tomto článku.
Už
i na HW serveru, resp. serveru automatizace.HW.cz,
lze najít několik článků, týkající se indukčních senzorů přiblížení (Indukční
senzory přiblížení - obecný popis, Indukční
senzory s analogovým výstupem od Carlo Gavazzi). Ty se však hlavně věnují
principu funkce těchto senzorů nebo popisu jejich parametrů, ale je v nich málo
informací o tom, kdy a v jakých případech je lze použít. Toto zkusím napravit
v tomto článku.
Zatímco použití indukční senzory přiblížení se "klasickým" spínaným výstupem se omezuje pouze získání informace, zda se kus kovu dostal do spínací oblasti senzoru, použití indukčních senzorů s analogovým výstupem (viz článek Indukční senzory s analogovým výstupem od Carlo Gavazzi) je mnohem širší a existuje pro ně mnoho aplikací. Zjednodušeně se dá říct, že jimi lze provádět téměř každé měření mechanického pohybu. Pro takové měření se v praxi často používají také optické reflexní závory, které jsou však vhodné pouze pro čisté provozy, protože jejich správná funkce optiky je výrazně závislá na čistotě optiky senzorů. Proto indukční senzory vždy najdete v špinavých provozech typu elektrárny, pískovny, kamenolomy, těžké strojírenské provozy, dopravní prostředky apod.
Měření posuvného pohybu
 Měření
posuvu a přiblížení objektu
Měření
posuvu a přiblížení objektu
Zde jde o měření, ke kterému jsou indukční senzory přiblížení primárně určeny, tj. k zjišťování vzdálenosti mezi kovovým předmětem a snímací částí senzoru. Každý senzor pak reaguje na změnu této mezery, změnou hodnoty analogového výstupu. Většina moderních senzorů umožňuje i nastavit, zdá má při hodnota napětí či proudu výstupu se při zvětšování mezery zvyšovat nebo snižovat. Citlivost senzoru a měřící dosah v takových případech velkou měrou závisí na typu kovu detekovaného objektu. Hodně magnetické kovy, jako je například železo, poskytují nejlepší citlivost, naopak na pravou nerezovou austenickou ocel je detektor citlivý minimálně. Ostatní kovy se pohybují mezi těmito mantinely. Navíc výstupní závislosti samotného indukčního snímače nejsou lineární (viz graf typické nelinearity indukčního snímače pro měřený objekt z hliníku (aluminium) a oceli (steel), což se v praxi řeší tzv. linearizací. Ta je buď prováděna obvody uvnitř senzoru, nebo je ji nutné dle potřeb aplikace nebo uživatele provádět externě. To se dnes téměř vždy provádí již digitálně v PLC nebo mikrokontroléru po digitalizaci analogového signálu A/D převodníkem. Parametry citlivosti, měřícího dosahu, případně křivky citlivosti obvykle najdete v datasheetech konkrétního indukčního senzoru.

Příklad nelineární závislosti výstupu indukčního snímače - závislost vzdálenosti s mezi měřeným objektem a snímačem na hodnotě výstupního napětí či proudu
Jeden klasický příklad regulace s využitím indukčního senzoru je na následujícím obrázku. Zde zjišťují kraje posuvu stolu změnou výšky kovové "rampy". Informace ze senzoru je vyhodnocena v řídícím systému, například s PLC, a je generován řídící signál pro motor provádějící posuv. Přiblížení ke kraji stolu se postupně zvyšuje mezera mezi objektem a senzorem, což například zvyšuje hodnotu napětí na výstupu senzoru. PLC tak získává postupně informaci o blížícím se okraji stolu a postupně zastaví motor. Místo indukčního snímače s analogovým výstupem by zde šel použít i jednodušší snímač se spínaným výstupem a ostré hrany "rampy", pak by se však musel řešit pozvolný dojezd a zastavení motoru softwarově v PLC a nebylo by možné provádět regulaci s takovou přesností.
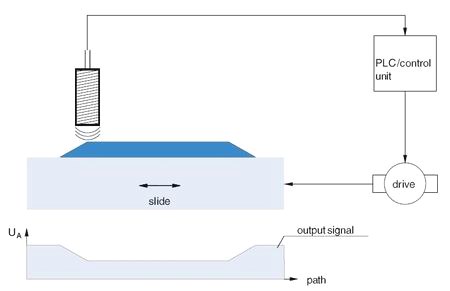
Použití indukčního snímače s analogovým výstupem k automatické regulaci posuvu
 Měření
rovnosti a kolmosti hran
Měření
rovnosti a kolmosti hran
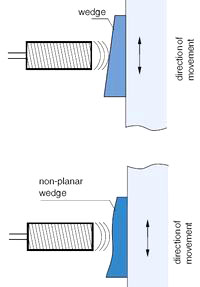
Indukční senzor s analogovým výstupem lze také účinně využít ke kontrole rovnosti vodorovných i šikmých povrchů, správnosti tvarování předmětu nebo ke kontrole kolmosti hran. Správně linearizovaný výstup senzoru by měl dávat při konstantně rostoucí výšce povrchu měřeného kovového předmětu lineární, postupně se zvyšující nebo snižující signál napětí či proudu na výstupu. Pak lze digitálním zpracováním a vyhodnocením tohoto signálu, například v PLC či v PC, zjišťovat tvar povrchu daných objektů a porovnáním s daty požadovaného průběhu vyhodnotit, zda požadovaný tvar odpovídá či nikoliv požadavkům.
Často se uvedená metoda, vzhledem k přesnosti měření až na jednotky mikrometrů, používá k měření tloušťky kovových nebo pokovených fólií či plechů, nebo k hlídání rovného povrchu.
Měření rotačního pohybu
Právě pro detekci nebo měření natočení/rotace jsou indukční senzory často využívané. K jejich funkci je však nutné provést mechanickou úpravu detekovaného objektu. Rotační pohyb se totiž musí převést z rotačního na "posuvný". Nejčastěji se využívá změny mezery mezi senzorem a otáčejícím se objektem. Úroveň signálu analogového napěťového nebo proudového výstupu je tak úměrná okamžité velikosti této mezery, a tedy i natočení např. hřídele.
K takovému měření se využívají kovové kotoučky:
- s excentrickým diskem (eccentric disk)
- s výstupky ("schody")
- kombinace výstupků a excentrického disku
 Koutouč
se excentrickým diskem
Koutouč
se excentrickým diskem
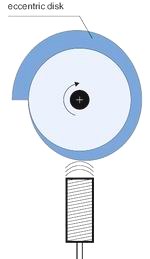
Ten představuje postupný lineární nárůst materiálu - kovu okolo celé jedné otočky (360°), který snižuje vzduchovou mezeru mezi kotoučem a senzorem. V úhlu natočení 0°, kde je vzduchová mezera například nejmenší, dává senzor na výstupu největší signál (největší napětí nebo proud v proudové smyčce), zatímco při otočení o 360° je vzduchová mezera naopak největší a signál na výstupu senzoru nejmenší. Při přechodech z jedné otáčky do druhé je navíc generován skok v signálu vlivem skokové změny vzduchové mezery. Tak lze i počítat počet otáček i zjišťovat směr otáčení. Záleží jen na složitosti vyhodnocení signálu, obvykle mikrokontrolérem, PLC nebo embedded PC.
Takovou to konfigurací lze například nahradit často problémový potenciometr nebo tachodynamo, které nejen, že musí mít mechanickou vazbu, ale má i nižší životnost. V případě provedení s indukčním senzorem je zajištěné elektrické oddělení obou systémů vzduchovou mezerou a vysoká odolnost proti znečištění.
V některých případech je úhel natočení limitovaný, což umožňuje použít jen výseč z excentrického disku, jako je tomu například v případě elektronického pedálu, v automobilech označovaného jako drive-by-wire. Právě spolehlivost tohoto principu tu hraje klíčovou roli.
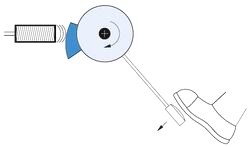
Převod pohybu pedálu na elektrický signál s použitím indukčního senzoru
 Kotouč
se "schody"
Kotouč
se "schody"
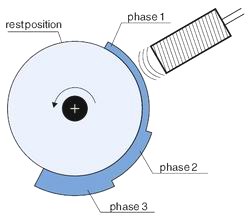
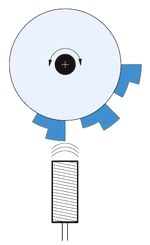
Další možností je provedení kotouče se "schody", kdy se vždy po otočení o určitý úhel skokově změní vzduchová mezera mezi senzorem a kotoučem (obrázek phase 1 až phase 2). Odstupňování skoků a jejich umístění může být libovolné dle potřeby aplikace. Tímto provedením lze navíc počítat jednotlivé otáčky i určovat směr otáčení.
Tak, kde není nutné absolutně měřit úhel natočení, lze použít metodu počítání impulsů. Proti klasickému provedení jen se stejnými pravidelnými výstupky, kde lze použít jednodušší indukční senzor přiblížení s pouze spínaným výstupem a kde není možné zjistit směr otáčení, lze použít složitější variantu s dvouúrovňovými schody, která sice vyžaduje použití senzoru s analogovým výstupem, ale umožňuje zjistit i směr otáčení (clockwise/anti-clockwise direction).
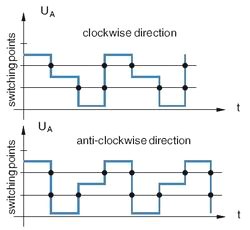
Příklad provedení systému pro měření rychlosti, hodnoty i směru natočení
 Měření
vyosení rotace a vibrací
Měření
vyosení rotace a vibrací
Kotouč bez výstupků nebo disku se pak dá použít pro hlídání nebo měření vyosení nebo házivosti, s přesností až na jednotky mikrometrů. Toho se využívá například ke kontrole hřídelí generátorů a motorů, házivosti válečků dopravníků, ložisek apod. Takové jednoduché měření může zabránit často velkým škodám u velkých otáčecích strojů, kde i jen malá házivost způsobená opotřebováním ložiska může úplně zničit celé zařízení, zvláště, když se v současné době výrobci obvykle snaží zvyšovat výkon právě zvyšováním počtu otáček/min. Jinde naopak může kontrola házivosti významně přispět k přesnosti měření a i dlouhodobě k dosažení výsledků s menší odchylkou.
Použití dvou a více senzorů dovoluje indukční senzory s analogovým výstupem využít i jako měřič vibrací nejen rotačního kovového předmětu (viz obrázek níže). Z principu je nejvhodnější zvolit rozmístění senzorů ve vzájemném posuvu 90°. Tato jednoduchá a levná kontrola může s výrazným předstihem dopředu detekovat i nejdříve malé mechanické poruchy systému, které však bez včasné opravy mohou způsobit velké škody nejen samotným zničením stroje, ale v horším případě i jeho okolí.
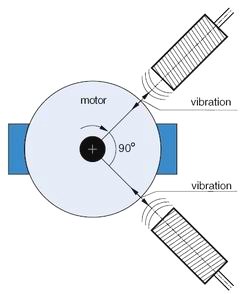
Měření vibrací otáčejícího se zařízení pomocí indukčního senzoru přiblížení s analogovým výstupem
Detekce postavení produktu na dopravníku
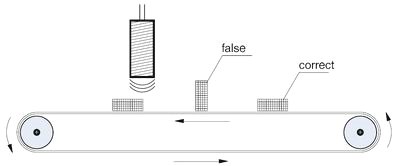
Indukční senzor lze využít i v některých aplikacích, kde se častěji objevují optické senzory přiblížení/optozávory (difúzní nebo reflexní optozávory). Pokud jsou hlídané objekty kovové nebo mají alespoň na sobě kovovou "značku", je možné použít i indukční senzor. Například pro aplikaci na obrázku níže, kde je hlídána správná pozice postavení produktu na dopravním páse pro účely dalšího zpracování, například balení, lakování nebo lepení etiket a štítků. Zde je však často i na překážku malý dosah senzoru, proto v uvedeném případě nesmí být příliš vysoký rozdíl výšky předmětu ve správné (correct) a špatné pozici (false). V provozech s prašným prostředím a více znečištěným prostředím však tato řešení může být spolehlivější než použití optozávor.
Závěr
Indukční senzory jsou jedna z možností, jak i v obtížných podmínkách bezkontaktně detekovat nebo zjišťovat přiblížení elektricky vodivých předmětů na vzdálenosti desítek mm. Indukční senzory přiblížení se proto dnes často využívají v průmyslu a jejich výrobou se zabývá každá významná firma z oblasti průmyslové senzoriky. V tomto článku jsem se pokusil přiblížit některé příklady a možnosti jejich použití. Případnou kombinací uvedených příkladů lze nalézt i další vhodné aplikace.
Antonín Vojáček
vojacek@ hwg.cz
DOWNLOAD & Odkazy
- Domovská stránka firmy Contrinex AG Industrial Electronics - www.contrinex.ch (převzaté obrázky uvedené v tomto článku)
- Domovská stránka firmy ifm electronic, spol. s r.o., výrobce senzorů - www.ifm-electronic.cz
- Domovská stránka firmy Carlo Gavazzi Automation Components - www.gavazzi-automation.com
- Domovská stránka firmy TURCK s.r.o, výrobce mj. indukčních senzorů - www.turck.cz
- Další firmy a web-stránky zabývající se mimo jiné indukčními senzory - www.katlax.com,
www.kotlin.cz, www.ipf-electronic.de
- Článek "Indukční senzory přiblížení - obecný popis" na serveru automatizace.HW.cz
- Článek " Indukční senzory s analogovým výstupem od Carlo Gavazzi" na serveru automatizace.HW.cz
- článek o integrovaných senzorech tlaku na stánkách automatizace.HW.cz
- Další články týkající se senzorů na serveru automatizace.HW.cz



