Náhodou jsem na internetu narazil na stránky zajímavého norského výrobce integrovaných MEMS senzorů, společnosti Sensonor Technologies AS. Nejen netypická domovská země společnosti je zajímavá. Její hlavní výrobní složkou jsou totiž integrované MEMS gyroskopy, tedy senzory pro detekci a měření rychlosti otáčení, jejichž funkce je založena na velmi zajímavém principu realizovaném na křemíkovém čipu. Tuto technologii výrobce nazval jako „ButterflyGyro“, tedy v překladu motýlí gyroskop. Zajímavé je, že tento název plně vystihuje základní měřící princip struktury připomínající motýlí křídla.
 MEMS
gyroskopy SAR1xx
MEMS
gyroskopy SAR1xx
V nabídce společnosti Sensonor jsou tři základní řady integrovaných jednoosých (1D) gyroskopů s označením SAR10, SAR100 a SAR150, lišící se přesností měření a rozlišením. Měřící rozsahy jsou v zásadě tři: 100, 250 a 400 °/s a všechny typy se vyznačují obousměrným plně duplexním sériovým komunikačním rozhraním SPI (vývody SCLK, MISO a MOSI), i když jejich pouzdra mají rozdílné provedení (speciální keramické LCC nebo klasické SOIC).
Některá pouzdra jsou v provedení pro snadnou horizontální i vertikální montáž a tím natočení na desce plošných spojů dle požadované osy měření. Shodné je i napájení stejnosměrným napětím 5 V, spotřeba cca 3 až 17 mA nebo i široká provozní teplota -40 až 90 °C.
Základní struktura gyroskopů Sensonor
Všechny typy gyroskopů mají stejný základní blokovou strukturu a funkční princip založený na mechanické ButterflyGyro MEMS křemíkové struktuře a vyhodnocovacích obvodech vytvořené technologií BiCMOS na jednom křemíkovém čipu.
 Funkce
je založena na vybuzení (excitaci) referenčního periodického pohybu tzv. motýlí
struktury (Butterfly structure). Úhlová rotace celé struktury pak generuje tzv.
Coriolisovi síly (Coriolis forces), jejichž frekvence je shodná s frekvencí
referenčnímu pohybu. Výsledkem je změna amplitudy měřených vibrací, která je
úměrná měřené rychlosti otáčení senzoru.
Funkce
je založena na vybuzení (excitaci) referenčního periodického pohybu tzv. motýlí
struktury (Butterfly structure). Úhlová rotace celé struktury pak generuje tzv.
Coriolisovi síly (Coriolis forces), jejichž frekvence je shodná s frekvencí
referenčnímu pohybu. Výsledkem je změna amplitudy měřených vibrací, která je
úměrná měřené rychlosti otáčení senzoru.
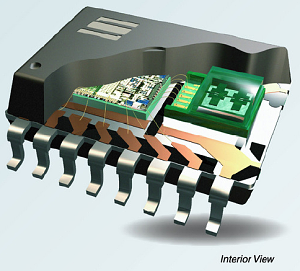
Společnost SensoNor má v tomto směru patentovanou uzavřenou technologii, kde vibrující hmoty jsou instalovány uvnitř nízkotlakého hermeticky uzavřeného pouzdra nutného pro vytvoření prostředí s malým dynamickým tlumením a vysokým činitelem jakosti Q elektromechanické rezonanční struktury bez jakékoliv časové degradace.
Křemíková struktura je třívrstvá a skládá se ze:
- spodní skleněné podložky s metalizovanou vrstvou vytvářející budící (excitační) a měřící (detekční) elektrody
- střední mikromechanické monokrystalické vrstvy s oscilačními hmotami, která též reprezentuje společnou zápornou elektrodu
- svrchní krycí skleněné vrstvy.
Tato struktura je prostřednictvím elektronického časově multiplexovaného přepínacího rozhraní připojena na plně elektronickou vyhodnocovací část senzoru s A/D převodníkem a procesorem pro digitálním zpracování naměřeného signálu. Tento způsob propojení umožňuje zlepšit symetrii struktury. Symetrickým mechanickým provedením podle vertikální osy a křížovým symetrickým propojením elektrod je Butterfly struktura trvale provozována ve vyváženém protifázovém pohybu. Bez působení externí rotace je budící a detekční režim vyvážený, což způsobuje, že senzor je téměř necitlivý na okolní vibrace a limitující jevy způsobené driftem a taktéž zvyšuje činitel jakosti Q.
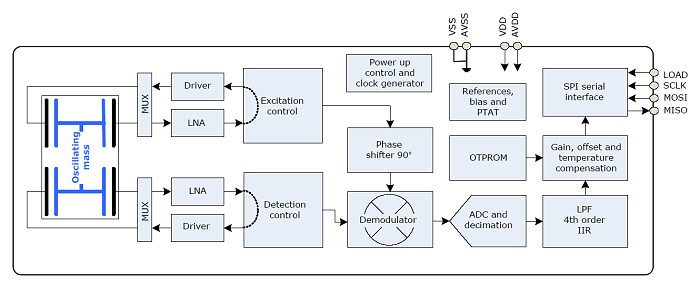
Blokové schéma zapojení MEMS gyroskopů Sensonor SAR1xx (podrobnější schéma je zde...).
Vzájemné porovnání budícího excitačního a naměřeného detekčního signálu se provádí prostřednictvím demodulátoru. Výsledný rozdílový signál úměrný externí rychlosti otáčení senzoru je pak dále digitalizován 10 nebo 12bitovým sigma-delta A/D převodníkem a digitálně filtrován, zesílen, kompenzován atd. Přes D/A převodník se pak případně realizuje ještě řídící zpětná vazba.
Přesné naladění budící rezonanční frekvence struktury je prováděno zvlášť u každého senzoru při závěrečném testování. To umožňuje přesně doladit tuhost celé měřící struktury a eliminovat výrobní nepřesnosti. Výsledek tohoto ladění jsou nahrané koeficienty v OTP paměti každého senzoru, které využívají vnitřní výpočetní algoritmy při digitálním zpracování signálu. Navíc pro přesné měření se využívá informace o aktuální teplotě z integrovaného teplotního senzoru, též zahrnuté do algoritmů vyhodnocovací části senzoru.
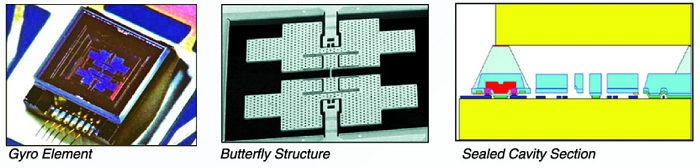
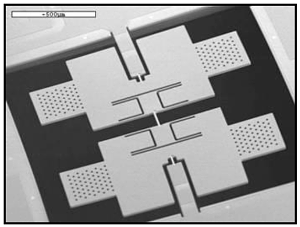
Reálné provedení ButterflyGyro struktury v senzorech SAR.
Bližší popis funkce ButterflyGyro mechanismu
Jak již bylo výše uvedeno měřící čip gyroskopu se skládá ze tří vrstev, přičemž prostřední vrstva tvoří onen hlavní snímací element. Ten se skládá ze dvou párů „křidélek“, které jsou upevněny k rámu prostřednictvím dvou asymetrických nosníčků realizující pružiny. Tvar snímací části velmi připomíná křídla motýla, což dalo struktuře uvedené jméno ButterflyGyro. Vytvořena je procesem anisotropického mokrého leptání. Proto jsou upevňovací nosníky zešikmené a umožňuje to umístit všechny kapacitní elektrody pro buzení pohybu struktury (excitaci) i zpětného měření pohybu (detekci) na stejnou spodní vrstvu pod párem křídel. Excitační elektrody představují na obrázku vlevo ty menší čárkované obdélníčky (8 ks plošek), zatímco detekční elektrody jsou ty čtyři větší čárkované obdélníky. Připojením stejnosměrného vychylovacího a střídavého budícího napětí na čtyři páry menších excitačních elektrod jsou „křídla“ nucena vibrovat (kmitat/rezonovat) v protifázi, v rovině čipu (excitation axis), danou budící / rezonanční frekvencí. To je tzv. excitační režim. Na každou z vibrujících hmot začne působit Coriolisovo zrychlení (Coriolis Acc.) způsobené Coriolisovými silami a vytváří periodický protifázový pohyb křídel mimo rovinu čipu. To je tzv. detekční režim. |
Základní principielní struktura systému ButterflyGyro |
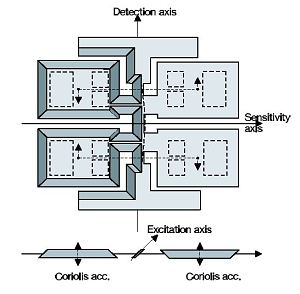
 Coriolisovo
zrychlení pak může být prezentováno jako setrvačná síla aplikovaná kolmo na
směr pohybu hmoty snímacího elementu a zároveň kolmo na osu externí měřené rychlosti
otáčení. Případná externí rychlost rotace senzoru okolo měřící osy (Sensitivity
axis) se pak projevuje jako zvýšením amplitudy detekčního signálu získávaného
z větších detekčních elektrod měřením kapacity.
Coriolisovo
zrychlení pak může být prezentováno jako setrvačná síla aplikovaná kolmo na
směr pohybu hmoty snímacího elementu a zároveň kolmo na osu externí měřené rychlosti
otáčení. Případná externí rychlost rotace senzoru okolo měřící osy (Sensitivity
axis) se pak projevuje jako zvýšením amplitudy detekčního signálu získávaného
z větších detekčních elektrod měřením kapacity.
Pro funkci ButterflyGyro struktury se využívá frekvence budícího napětí v řádu jednotek kHz. Konkrétně gyroskopy Sensonor využívají kmitočtu 9,4 kHz. Síla pohybu křidélek je pak v řádu setin mikroN. Tedy velmi malá.
Současná reálná struktura používaná v integrovaných senzorech Sensonor SAR1xx (viz obrázky vlevo a níže) se sice na první pohled lehce liší od základní principielní struktury, jak byla vynalezena a prezentována v roce 2004 Imego Institutem v Goteborgu, ale základní princip funkce je prakticky totožný.
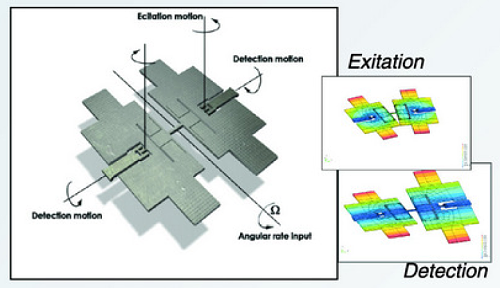
Reálná ButterflyGyro struktura používaná v senzorech Sensonor SAR1xx.
Závěrem…
Jak je ze stručného popisu i obrázků patrné, fyzika funkce celé struktury je dost složitá. Také její vývoj trval více jak 3 roky. Výsledkem jsou však dost přesné a na rušení odolné snímače vhodné pro použití i v náročných provozních podmínkách. Výrobce pak u nejlepšího typu SAR100 uvádí nepřesnost měření 1% rozsahu, nelinearitu 0,1% rozsahu, vliv vibrací max. +/ -0,05 (°/s)/g, posun vlivem teploty +/- 0,5°/s, stabilitu 0,02°/s a chybu opakovatelnosti 0,1°/s.
Vytvořil na základě informací od firmy Sensonor: Antonín Vojáček
DOWNLOAD & Odkazy
- Stránky výrobce gyroskopů SAR / ButterflyGyro, norské společnosti Sensonor Technologies AS - www.sensonor.com
- Dag Billger: "The Butterfly Gyro (35889)", The Imego Institute, Göteborg, Sweden, 2004
- Článek o principu MEMS gyroskopů STMicroelectronics - http://automatizace.hw.cz/integrovane-mems-gyroskopy
- Další články a testy o snímačích, PLC, komponentech nejen pro průmyslové aplikace najdete na stránkách serveru automatizace.HW.cz



