Gyroskopy jsou již dlouhou dobu známy a využívány pro měření a určování změny polohy nebo natočení libovolného předmětu, ke kterému jsou připevněny. Dříve však bylo možné použít je mechanické provedení, případně optické s využitím světla nebo světlovodných vláken. Dnes je již lze najít v integrované podobě klasických součástek obsahující mimo samotný snímač i celou škálu vyhodnocovacích obvodů a logiky. Výstup je pak analogový, digitální nebo obojí. Díky tomu lze gyroskopy použít i v běžných aplikacích, nejen ve vědě a výzkumu. Například dnes běžné přesné určování pozice a sledování pohybu objektů přes GPS by bez gyroskopů nebylo možné.
Obecný princip MEMS gyroskopů
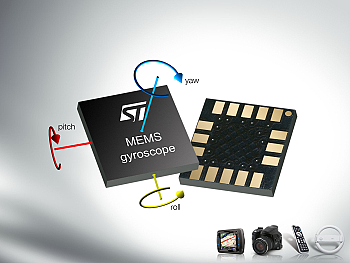
 Gyroskopy
jsou obecně určené pro měření úhlové rychlosti, tzn. údaj o tom, jak se měřený
objekt rychle otáčí, v jednotkách stupňů/sekundu (°/s). Rotaci je možné typicky
měřit vzhledem k jedné ze tří os z, y, x, někdy označované jako svislá (kolmá)
osa (yaw axis), příčná osa (pitch axis) a podélná osa (roll axis). Integrované
gyroskopy, vyráběné různými výrobci jako integrované MEMS obvody, pracující
na principu Coriolisovy síly.
Gyroskopy
jsou obecně určené pro měření úhlové rychlosti, tzn. údaj o tom, jak se měřený
objekt rychle otáčí, v jednotkách stupňů/sekundu (°/s). Rotaci je možné typicky
měřit vzhledem k jedné ze tří os z, y, x, někdy označované jako svislá (kolmá)
osa (yaw axis), příčná osa (pitch axis) a podélná osa (roll axis). Integrované
gyroskopy, vyráběné různými výrobci jako integrované MEMS obvody, pracující
na principu Coriolisovy síly.
Co je to Coriolisova síla a jak se projevuje ?
K dobrému pochopení principu dále uvedených senzorů - gyroskopů je nutné si alespoň stručně připomenout, co to je tzv. Coriolisova síla. Základní poučka z fyziky by mohla znít například takto: Coriolisova síla je tzv. virtuální síla, která působí na libovolný hmotný předmět či objekt, který se pohybuje rychlostí v v soustavě rotující kolem osy rotace úhlovou rychlostí ω (FC = 2 . m . v x ω, kde x je vektorový součet).
Jednodušeji to lze vysvětlit na níže uvedeném obrázku, kde se nějaká slečna pohybuje určitou rychlostí v od středu rotujícího kruhu k jeho okraji. Přitom na ni působí vzrůstající virtuální síla (Coriolisova síla), která má maximální velikost u kraje kotouče. Stejná síla tak působí na všechny hmotné objekty na naší planetě, protože ta je právě takovou soustavou otáčející se pravidelně kolem své osy. Podle vzorce pak na severní polokouli působí (stáčí objekt) ve směru hodinových ručiček, na jižní pak v protisměru. Na rovníku je síla nulová, na pólech maximální. Praktický důsledek lze například pozorovat v točení vírů při odtoku vody z umyvadla nebo u tornáda, vymleté pravé břehy řek nebo více opotřebované pravé kolejnice na jednosměrných železničních tratích.

Jednoduchý příklad působení Coriolisovy síly (modrá šipka) na osobu pohybující se od středu k okraji rotujícího kruhu
Stejného účinku se pak využívá i mechanických gyroskopech. Zde při pohybu objektu, upevněného na pružinách uvnitř rámu, směrem ven (k okraji rotujícího kotouče) na něj působí Coriolisova síla směrem doleva, při opačném směru pohybu objektu pak doprava. Protože velikost a směr této síly je úměrný i rychlosti a směru otáčení, lze tento systém snadno využít pro měření velikosti úhlové rychlosti.

Působení Coriolisovy síly na mechanický gyroskop tvořený hmotným objektem periodicky se pohybující (kmitající) k okraji kruhu (vlevo) a ke středu (vpravo)
Princip integrovaných MEMS gyroskopů
Při praktickém použití Coriolisovy síly v integrovaných gyroskopech se využívá technologie MEMS, kde se vytváří na čipu spolu s elektrickými obvody i mechanické mikrosoučásti, které tvoří samotný snímač. Různí výrobci sice používají trošku odlišné struktury, ale základní princip je vždy podobný. Základem je periodicky se pohybující (mechanicky rezonující) struktura přesně dané hmotnosti upevněná pomocí pružin v rámu. Směr pohybu (Mass drive direction) musí však vždy být kolmý ke směru otáčení. Za těchto podmínek vzniká a na hmotnou pohybující část snímače působí Coriolisova síla jejíž velikost je úměrná úhlové rychlosti otáčení. Ta způsobuje stlačení vnějších pružin rámu a způsobí vzájemný posuv měřících plošek (Coriolis sense fingers) fungující jako elektrody vzduchových kondenzátorů. Výstup je tedy změna kapacity úměrná úhlové rychlosti otáčení °/s.
Zjednodušená struktura snímače MEMS gyroskopu a příklad funkce struktury snímače gyroskopu při rotaci
Jaký je rozdíl mezi MEMS gyroskopem a akcelerometrem?
 Z
pohledu základního principu jen jeden rozdíl, za to však významný. Oba sice
využívají podobný pohyblivý rám se snímacími ploškami pracující jako elektrody
kondenzátorů, u kterých se tak při pohybu rámu mění kapacita, ale zatímco pohyblivá
struktura je u akcelerometru volná a hýbe se jen při působení síly (zrychlení),
u gyroskopu je s touto strukturou záměrně periodicky pohybováno (mechanická
rezonance), aby se projevil efekt Coriolisovy síly. Zatímco tedy akcelerometr
měří hodnotu vychýlení vnitřní MEMS struktury jako důsledek působícího zrychlení
(síly vznikající při urychlování či zpomalování přímo pohybujícího se objektu),
gyroskop zjišťuje rotační pohyb, přesněji řečeno rychlost ustáleného rotačního
pohybu.
Z
pohledu základního principu jen jeden rozdíl, za to však významný. Oba sice
využívají podobný pohyblivý rám se snímacími ploškami pracující jako elektrody
kondenzátorů, u kterých se tak při pohybu rámu mění kapacita, ale zatímco pohyblivá
struktura je u akcelerometru volná a hýbe se jen při působení síly (zrychlení),
u gyroskopu je s touto strukturou záměrně periodicky pohybováno (mechanická
rezonance), aby se projevil efekt Coriolisovy síly. Zatímco tedy akcelerometr
měří hodnotu vychýlení vnitřní MEMS struktury jako důsledek působícího zrychlení
(síly vznikající při urychlování či zpomalování přímo pohybujícího se objektu),
gyroskop zjišťuje rotační pohyb, přesněji řečeno rychlost ustáleného rotačního
pohybu.
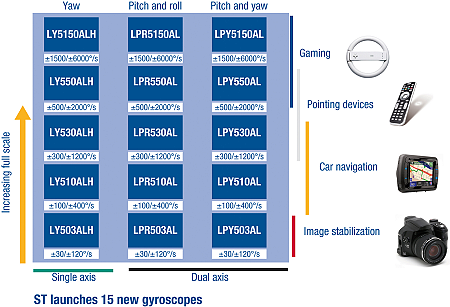
Nabídka MEMS gyroskopů od STMicroelectronics
Známý výrobce integrovaných obvodů a MEMS snímačů, společnost STMictroelectronics, má ve své široké nabídce celkem 15 různých typů integrovaných MEMS gyroskopů pro s různými rozsahy a směry měření. Jak již bylo značeno výše, gyroskopy jsou zde tvořeny kombinací jednoho akčního členu a jednoho akcelerometru integrovaných v jedné mikromechanické struktuře. Tzn. že zahrnuje snímací prvek tvořený jedním poháněným hmotným prvkem udržovaný v mechanických pohybových oscilacích. Tím se celá struktura udržuje ve schopnosti reagovat na její otáčení a využít Coriolisovu sílu.
Na stejném čipu integrované elektrické CMOS obvody vyhodnocují změny kapacity z MEMS struktury a upravují na výstupní signál integrovaného snímače. I když je výstup analogový, uvnitř probíhá digitální zpracování. Proto je nejdříve signál z MEMS struktury převeden na digitální, poté se číslicově vyhodnotí a přepočte změnu kapacity na jí úměrnou hodnotu rychlosti otáčení ve stupních za sekundu. Sled po sobě generovaných čísel je pak opět převádět D/A převodníkem na výsledný lineární analogový napěťový signál. Ten bývá ještě na závěr přizpůsoben a vyveden na příslušné vývody součástky. Většina gyroskopů je zapouzdřena v plastovém pouzdře LGA.

Kompletní přehled nabídky MEMS gyroskopů společnosti STMicroelectronics

 Základní
parametry MEMS gyroskopů STMicroelectronics
Základní
parametry MEMS gyroskopů STMicroelectronics
- Oddělené analogové výstupy pro každou snímanou osu
- Pro každou osy oddělený výstup zesílený 1x nebo 4x
- Rozšířené napájení: 2.7 až 3.6 V
- Měřící rozsah: od 30°/s (obvod Lxx503AL) až 6000°/s (obvod Lxx5150AL)
- Schopnost měření změn s frekvencí do 140 Hz (pásmo -3 dB)
- Spotřeba: < 10 µA v nízkopříkonovém režimu
- Velká teplotní stabilita: rozsah -40°C až 85°C
- Vestavěný autotest
- Velká odolnost proti nárazům a vibracím
- Pouzdro LGA


Vnitřní struktura 2D MEMS gyroskopu LPY510AL (vpravo) a příklad zapojení 1D gyroskopu LY5150ALH (vlevo)
 Příklady
použití gyroskopů ST
Příklady
použití gyroskopů ST

- Detekce a měření rotačního pohybu
- Stabilizační jízdní systémy automobilů
- Zpřesňování pozice systémů GPS
- Stabilizace obrazu a předmětů
- Zjišťování změny polohy, detekce pohybu
- Měření setrvačnosti
- Detekce převrácení, např. automobilu
- Navádění a řízení raket, letadel, robotů apod.
- atd.
Závěrem...
Po již "historické" recenzi integrovaných MEMS gyroskopů Analog Devices na stránkách serveru automatizace.hw.cz, který jsem napsal již v roce 2005, jsem se tímto článkem k tomu to tématu vrátil. Článek oprášil teoretické informace, které jsou pak zde doplněné o informace o nabídce společnosti STMicroelectronics. S tím jak se zdokonalují stávající a neustále vyvíjejí další inteligentní elektronická zařízení, které vyžadují bezkontaktní měření polohy, rychlosti a detekci pohybu či zrychlování, se nabídka integrovaných akcelerometrů a gyroskopů rozrůstá jako houby po dešti. Dávno to již nejsou "exotické" snímače, jako tomu ještě bylo před 5 lety, ale dnes jde již o zcela běžné součástky, které nalezneme v mnoha moderních elektronických zařízení. Neobejdou se dnes bez nich roboti, navigace, herní konzole, fotoaparáty a kamery, některé mobilní telefony a hlavně dopravní prostředky a systémy včele s letadly, automobily a loděmi. Najít je ale také již můžete ve lepších pračkách, sušičkách a další bílé technice a zařízeních, kde se něco otáčí, pohybuje nebo vibruje.
Antonín Vojáček
DOWNLOAD & Odkazy
- Domovská stránka společnosti STMicroelectronics - www.st.com
- Přímý odkaz na stránku o MEMS gyroskopech - www.st.com/stonline/products/families/sensors/gyroscopes.htm
- Článek "Gyroskopy v integrovaném provedení MEMS" na serveru automatizace.hw.cz
- Článek "MEMS akcelerometry všude kam se podíváš" na serveru automatizace.hw.cz



