 V minulém prvním díle "Magnetické senzory přiblížení - 1. díl" jsem se pokusil představit dva v současné době velmi rozšířené principy funkce průmyslových magnetických snímačů, tedy historický Reedův magnetický princip/přepínač a v porovnání s tím naopak nejmodernější princip magnetického senzoru s nasycovaným jádrem cívky, tedy běžněji označovaný jako magneto-indukční senzor. Nicméně ještě je tu další princip magnetického senzoru, který se nachází ve většině moderních elektro-mechanických zařízeních a strojích - magnetický senzor s Hallovým principem.
V minulém prvním díle "Magnetické senzory přiblížení - 1. díl" jsem se pokusil představit dva v současné době velmi rozšířené principy funkce průmyslových magnetických snímačů, tedy historický Reedův magnetický princip/přepínač a v porovnání s tím naopak nejmodernější princip magnetického senzoru s nasycovaným jádrem cívky, tedy běžněji označovaný jako magneto-indukční senzor. Nicméně ještě je tu další princip magnetického senzoru, který se nachází ve většině moderních elektro-mechanických zařízeních a strojích - magnetický senzor s Hallovým principem.
Základní teorie Hallova jevu
 Hallův jev či Hallův efekt, tedy vliv magnetického pole na směr toku elektrického proudu, byl objevem v roce 1879 Edwin Hallem během jeho doktorského studia na univerzitě Johna Hopkinse v Baltimoru. Hall si během pokusu, který měl potvrdit vliv magnetického pole na změnu odporu vodiče, všimnul, že pokud položí magnet kolmo k ploše tenkého kvádru zlata, kterým protéká proud, objeví se na jeho protějších stranách rozdílové napětí. Dále zjistil, že toto napětí je úměrné hodnotě proudu, hustotě magnetického toku a magnetické indukci.
Hallův jev či Hallův efekt, tedy vliv magnetického pole na směr toku elektrického proudu, byl objevem v roce 1879 Edwin Hallem během jeho doktorského studia na univerzitě Johna Hopkinse v Baltimoru. Hall si během pokusu, který měl potvrdit vliv magnetického pole na změnu odporu vodiče, všimnul, že pokud položí magnet kolmo k ploše tenkého kvádru zlata, kterým protéká proud, objeví se na jeho protějších stranách rozdílové napětí. Dále zjistil, že toto napětí je úměrné hodnotě proudu, hustotě magnetického toku a magnetické indukci.
Tento jev dále studoval, plně vyzkoušel a popsal, ale vzhledem k tehdy omezených technologiím došlo k jeho praktickému využití v aplikacích až po objevení a zvládnutí výroby polovodičových materiálů. V roce 1965 pak pánové Everett Vorthmann a Joe Maupin vytvořily plně integrovaný křemíkový bezkontaktní spínač s Hallovým jevem, který poté našel masové nasazení například v elektronických klávesnicích.
Hallův jev tedy spočívá ve vychylování směru toku el. proudu v závislosti na velikosti indukce magnetického pole B, které je kolmé na polovodičovou (křemíkovou) tenkou destičku, tzv. Hallův element. Výsledkem je generování rozdílového napětí na bočních stranách elementu úměrné právě velikosti působícího magnetického pole či jeho kolmosti vzhledem k destičce.
Zatímco bez působení magnetického pole na Hallův element je směr proudu přímý (vlevo), při jeho působení dochází k zakřivení dráhy (vpravo).
Pokud tedy Hallův element, jímž protéká konstantní hodnota proudu IC (je připojen na zdroj konstantního napětí), není vystaven působení magnetického pole B, je napětí VH na jeho svorkách nulové.
Pokud se objeví v jeho okolí magnetické pole, působí na elementem procházející proud elektronů tzv. Lorentzova síla, která elektrony vychyluje z přímého směru vždy k jedné boční straně destičky silou podle vzorce F = Q ( v x B ), kde Q je náboj, v je jejich rychlost a B je indukce působícího mag. pole. Změní se tak rozložení náboje, kdy na jedné straně je větší koncentrace nosičů náboje (elektronů) než na druhé a tedy obě boční stěny destičky mají rozdílný potenciál. Vzniká tak elektrické pole E a na svorkách Hallova elementu se generuje tzv. Hallovo napětí VH.
Magnetické senzory s Hallovým jevem
Magnetických senzorů s Hallovým jevem je hned několik typů, podle toho pro jaký účel se používají a v jakém jsou konkrétně mechanickém i elektrickém provedení.
Z toho pohledu lze vytvořit dvě základní skupiny:
- měření magnetického pole a jeho prostřednictvím i hodnotu el. proudu či napětí,
- měření a detekce pohybu, přiblížení, umístění.
 První skupina pak zahrnuje aplikace, kde je potřeba buď opravdu měřit žádoucí nebo nežádoucí magnetické pole, nebo zprostředkovaně jiné elektrické veličiny, jako je el. proud a napětí. Také se této metody využívá v známých klešťových ampérmetrech, kde není nutné rozpojovat obvod, pouze je "kleštěmi" měřáku obepne měřený vodič. Ty nás konkrétně v zaměření tohoto článku nezajímají,
První skupina pak zahrnuje aplikace, kde je potřeba buď opravdu měřit žádoucí nebo nežádoucí magnetické pole, nebo zprostředkovaně jiné elektrické veličiny, jako je el. proud a napětí. Také se této metody využívá v známých klešťových ampérmetrech, kde není nutné rozpojovat obvod, pouze je "kleštěmi" měřáku obepne měřený vodič. Ty nás konkrétně v zaměření tohoto článku nezajímají,
Druhá skupina představuje použití v aplikacích, kde lze použít i jiné "technologie" (např. jiné magnetické principy detekce, či indukční či kapacitní metody). Výhodou senzorů s Hallovou sondou je možnost jednoduše vytvářet na křemíkovém chipu společně se snímací jednotkou i celou vyhodnocovací jednotku a tedy je není možné dostatečně miniaturizovat. Lze tak vytvořit opravdu milimetrový senzor vybavený kompletní elektronikou pro detekci pohybu či přiblížení i velmi malých objektů.
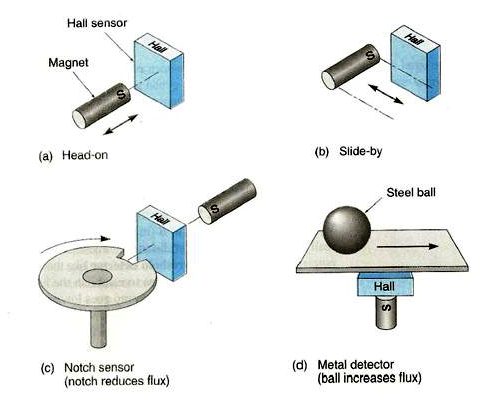

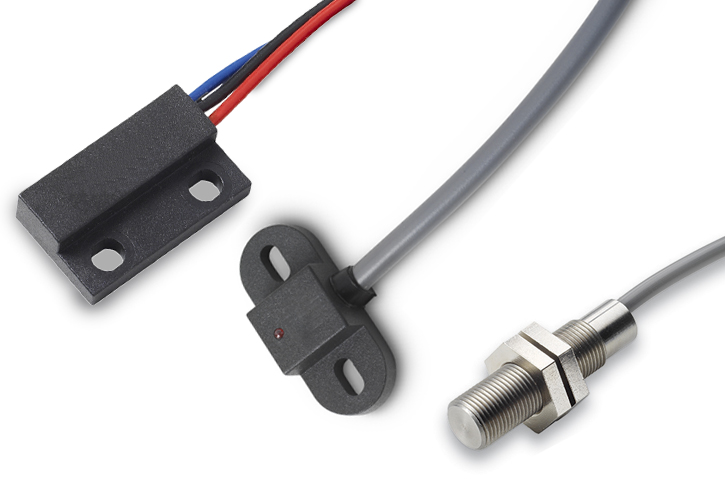
Příklady použití magnetických senzorů s Hallovým jevem - detekce přiblížení magnetů nebo feromagnetických mteriálů při použití tzv. vychýleného Hallova snímače (vlevo) a detekce natočení / rotace BLCD motoru (vpravo).
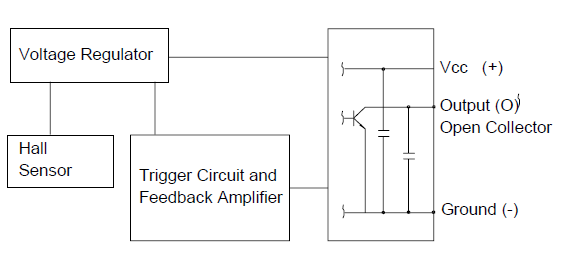
Toto řešení v praxi je dnes běžné a představuje kompletní miniaturní součástky trošku připomínající tranzistory, protože v této podobě dost často mají malé plastové pouzdro a 3 nebo 4 elektrické vývody (napájení +/- a pak jeden nebo 2 vývody signálové - buď spínaný výstup nebo proměnný analogový). Tyto součástky jsou však v provedení do desek plošných spojů a nehodí se pro přímé samostatné nasazení do průmyslu.
 Proto se také různí výrobci nabízejí i kompletní provedení v podobě, v jakém běžně uvidíte i například indukční či kapacitní senzory - tedy ve válcovém nebo různém kvádrovém pouzdru. Často také na první pohled je nelze od nich rozeznat a tak při identifikaci snímačů v praxi je nejlepší si vždy přečíst označení snímače z jeho pouzdra a najít na internetu konkrétní popis.
Proto se také různí výrobci nabízejí i kompletní provedení v podobě, v jakém běžně uvidíte i například indukční či kapacitní senzory - tedy ve válcovém nebo různém kvádrovém pouzdru. Často také na první pohled je nelze od nich rozeznat a tak při identifikaci snímačů v praxi je nejlepší si vždy přečíst označení snímače z jeho pouzdra a najít na internetu konkrétní popis.
Snadno lze v praxi zaměnit magnetický snímač s indukčním, protože dokonce i některé magnetické senzory z Hallovým snímačem nemusí k detekci mít přímo magnet, ale vystačí jim jen přiblížený feromagnetické materiál. Z tohoto pohledu totiž lze magnetické senzory s Hallovým jevem rozdělit na:
- Přímý magnetický senzor s Hallovým snímačem - sloužící pro detekci přiblížení magnetu.
- Senzor s vychýleným Hallovým snímačem - sloužící pro detekci přiblížení feromagnetického materiálu (bez magnetu).
 Přímý magnetický senzor s Hallovým snímačem
Přímý magnetický senzor s Hallovým snímačem

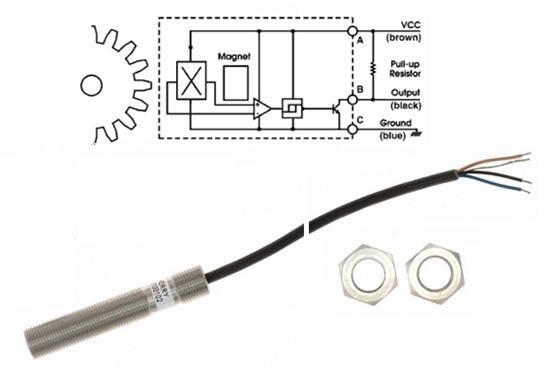
V prvém klasickém provedení magnetického senzoru s Hallovým jevem se v případě průmyslu s nimi obvykle setkáte v podobě válcového nebo kvádrového provedení zcela podobné indukčním snímačům nebo i magnetickém snímačům s magneto-indukčním principem. Obvykle se však nevyrábějí v provedení do T-drážky pneumatických válců, kde se využívá obvykle Reedův nebo magneto-indukční princip (viz článek Magnetické senzory přiblížení - 1. díl).
 Tyto snímače detekují přiblížení magnetu, který tak musí být umístěn v pohybujícím se předmětu. Sami tedy na kovové předměty ani pouzdra nereagují a tedy umožňují detekci předmětů i uvnitř kovových neferomagnetických pouzder (nerezová ocel, hliník, měď a její slitiny atd.). Mimo provedení jako součástek do plošných spojů se pro přímé průmyslové použití obvykle vyrábějí v růzmé, kvádrovém pouzdře nebo v typizovaném válcovém závitovém pouzdře M8 až M18, přičemž jejich snímací dosah bývá obvykle 50 až 60 mm u velikosti M8 a cca 70 mm u M18. Tyto hodnoty jsou obvykle o cca 10 až 30 mm nižší než u magneto-indukčních senzorů, který díky použité metodě s větší citlivostí mají větší dosah, nicméně obvykle bývají i dražší. Výstup bývá buď analogový, protože Hallův snímač sám generuje přesný lineární analogový napěťový signál, který pak již jen stačí zesílit a "přetransformovat" na klasický průmyslový výstup (buď napěťový 0 až 10 V, případně proudový 0/4-20 mA), nebo klasický spínaný tranzistorový PNP nebo NPN, jako u jiných průmyslových snímačů.
Tyto snímače detekují přiblížení magnetu, který tak musí být umístěn v pohybujícím se předmětu. Sami tedy na kovové předměty ani pouzdra nereagují a tedy umožňují detekci předmětů i uvnitř kovových neferomagnetických pouzder (nerezová ocel, hliník, měď a její slitiny atd.). Mimo provedení jako součástek do plošných spojů se pro přímé průmyslové použití obvykle vyrábějí v růzmé, kvádrovém pouzdře nebo v typizovaném válcovém závitovém pouzdře M8 až M18, přičemž jejich snímací dosah bývá obvykle 50 až 60 mm u velikosti M8 a cca 70 mm u M18. Tyto hodnoty jsou obvykle o cca 10 až 30 mm nižší než u magneto-indukčních senzorů, který díky použité metodě s větší citlivostí mají větší dosah, nicméně obvykle bývají i dražší. Výstup bývá buď analogový, protože Hallův snímač sám generuje přesný lineární analogový napěťový signál, který pak již jen stačí zesílit a "přetransformovat" na klasický průmyslový výstup (buď napěťový 0 až 10 V, případně proudový 0/4-20 mA), nebo klasický spínaný tranzistorový PNP nebo NPN, jako u jiných průmyslových snímačů.
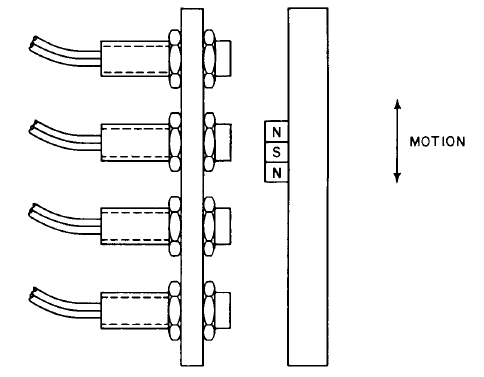
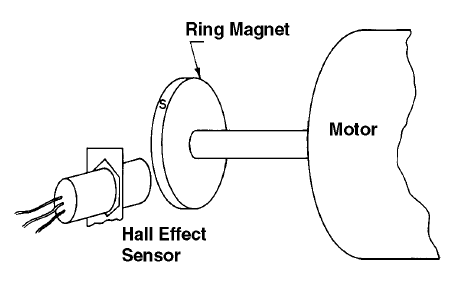
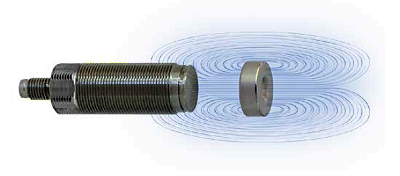
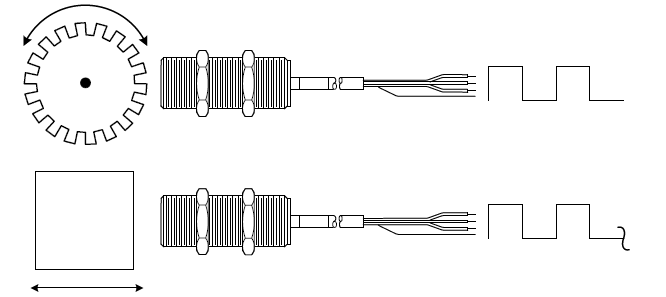
Příklady použití průmyslého provedení válcových magnetických snímačů s Hallovým snímačem: detekce posuvu předmětu (vlevo) a detekce otáčení magnetického kola (vpravo).
 Senzor s vychýleným Hallovým snímačem
Senzor s vychýleným Hallovým snímačem
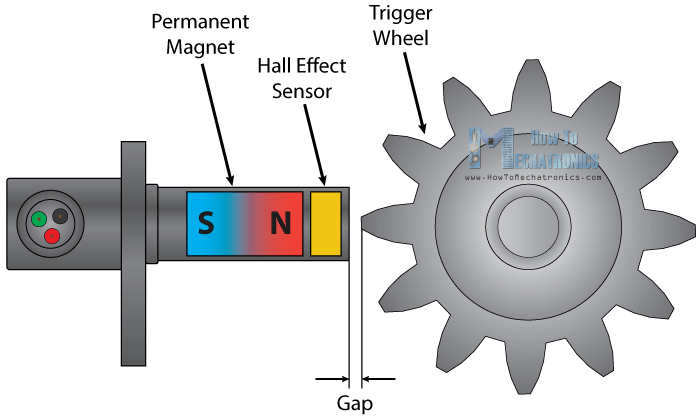
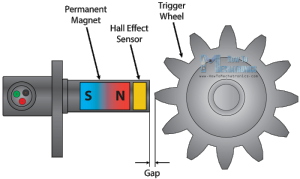
V druhém uvedeném provedení tzv. vychýleného Hallova snímače, však se však již nedetekuje přiblížení magnetu, ale jen feromagnetického kovu, tedy nejčastěji železa. Využívá se ze "fígl", kde za Hallovým snímačem je ve společném pouzdru pevně umístěn magnet, který generuje potřebné magnetické pole. Přiblížením feromagnetického kovu druhé straně Hallova snímače (tj. k čelní snímací straně pouzdra) se pak provádí vychýlení jeho magnetického pole a tato změna na Hallově snímače se pak objeví ve formě změny napětí, která se vyhodnotí.
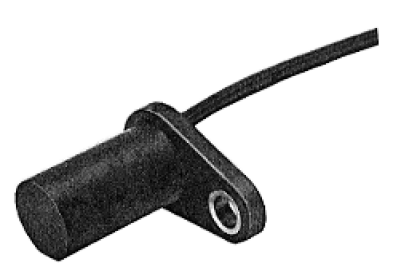
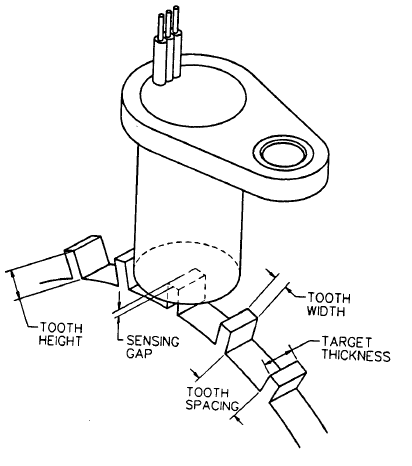
Příklad provedení průmyslového magnetického Hallova senzoru pro měření otáček.
 Tento systém je velmi elegantní, nicméně má jednu velkou potíž: jeho snímací dosah je poměrně malý, v řádu jednotek mm. Proto se tento systém v průmyslové praxi využívá hlavně pro systém měření otáček prostřednictvím snímání otáčení ozubeného kola. To je nejčastější varianta, kdy je snímací čelo senzoru pevně umístěno cca 2 mm od ozubeného kola a následně během jeho otáčení se přibližováním a oddalování jeho zubů generuje na výstupu Hallova snímače obdélníkový signál jehož frekvence odpovídá rychlosti otáčení kola a počtu jeho zubů. Nicméně by bylo možné použít i variantu měření rychlého vibrujícího posuvného pohybu v rovině kolmé na snímací čelo senzoru. Maximální frekvence signálu může být teoreticky až 100 kHz, ale často ji skutečné snímače je mají o něco nižší cca 15 až 20 kHz.
Tento systém je velmi elegantní, nicméně má jednu velkou potíž: jeho snímací dosah je poměrně malý, v řádu jednotek mm. Proto se tento systém v průmyslové praxi využívá hlavně pro systém měření otáček prostřednictvím snímání otáčení ozubeného kola. To je nejčastější varianta, kdy je snímací čelo senzoru pevně umístěno cca 2 mm od ozubeného kola a následně během jeho otáčení se přibližováním a oddalování jeho zubů generuje na výstupu Hallova snímače obdélníkový signál jehož frekvence odpovídá rychlosti otáčení kola a počtu jeho zubů. Nicméně by bylo možné použít i variantu měření rychlého vibrujícího posuvného pohybu v rovině kolmé na snímací čelo senzoru. Maximální frekvence signálu může být teoreticky až 100 kHz, ale často ji skutečné snímače je mají o něco nižší cca 15 až 20 kHz.
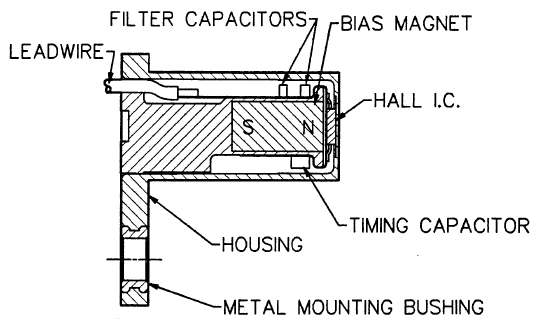
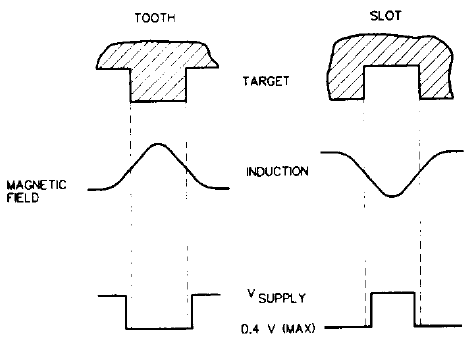
Příklad provedení principu a výstupního signálu senzoru otáček s Hallovým snímačem společnosti Honeywell.
Závěr 2. dílu
 Magnetické senzory s Hallovým jevem (snímačem) jsou společně s magnetickými senzory s magneto-indukčním snímačem dnes nejběžnější provedení pro spolehlivou a přesnou detekci pozice předmětů prostřednictvím magnetů.
Magnetické senzory s Hallovým jevem (snímačem) jsou společně s magnetickými senzory s magneto-indukčním snímačem dnes nejběžnější provedení pro spolehlivou a přesnou detekci pozice předmětů prostřednictvím magnetů.
Mnoho výrobců však často ani neuvádí, na jakém z techto dvou principů jejich senzory vlastně pracují a je pravda, že ve většině aplikací to je docela jedno. Jen tam, kde dopředu je maximalizovat snímací dosah při co nejmenších rozměrech senzoru, je dobré vědět, že magneto-indukční princip je v tomto směru výhodnější a obvykle dosahuje cca o 20% v tomto směru lepších hodnot. Nicméně při porovnávání údajů max. snímacích dosahů je nutné se v případě mag. senzorů vždy zajímat i o velikost magnetu, pro který je uváděná hodnota platná. Kvalitní a solidní výrobce / dodavatel vždy v datasheetu by měl uvádět tabulku či graf snímacího dosahu vs. velikost použitých magnetů a pro vzájemné porovnání snímacích dosahů senzorů různých výrobců je nutné vybrat hodnoty pro shodný typ a velikost magnetu.
Mezi přední výrobce na magnetické senzory s Hallovým snímačem jistě patří americká firma Honeywell. Jak dalšího výrobce lze zmínit například společnost Sick GmbH.
Na proti tomu mezi výrobce magnetických senzorů s magneto-indukčním principem pak například patří společnost Micro-Epsilon nebo Turck GmbH.
Odkazy:
- Webové stránky společnosti Honeywell, velkého výrobce Hallových snímačů i celých průmyslových senzorů s Hallovým jevem:
- Webové stránky společnosti SICK, výrobce průmyslových senzorů s Hallovým jevem: www.sick.com
- Kniha vydavatelství BEN: Ing. Radislav Martínek, "Senzory v průmyslové praxi", 2004
- Článek "Magnetické senzory přiblížení - 1. díl" na serveru automatizace.HW.cz.
- Další články týkající se senzorů na serveru automatizace.HW.cz



