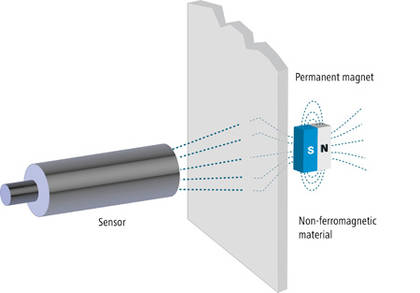
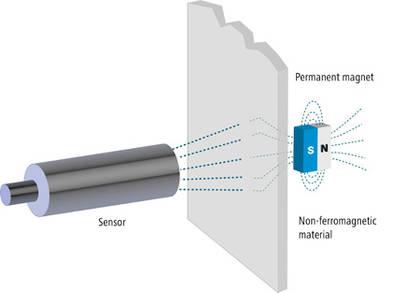
 Magnetické senzory přiblížení (Magnetic proximity sensors) nebo magnetické spínače, jak se taky pojmenovávají, slouží obecně k bezdotykové a bez opotřebení probíhající detekci poloh v řídicí technice. Jsou používány všude tam, kde již induktivní senzory z hlediska spínacích vzdáleností nestačí, protože proti nim nabízí podstatně delší spínací vzdálenosti při stejných nebo i menších rozměrech snímače. Další jejich výhodou je použití jen magnetismu. Magnetická pole totiž prochází všemi nemagnetickými materiály, a tak mohou tyto senzory rozpoznávat magnety, které jsou umístěny např. za stěnami z barevných kovů, ušlechtilé ocele, hliníku, umělých hmot nebo dřeva. Pod obecným označením "magnetický senzor" se však skrývá z pohledu principu jeho funkce hned několik možných provedeních vykazující zcela odlišný systém funkce a tím i odlišné některé provozní vlastnosti :
Magnetické senzory přiblížení (Magnetic proximity sensors) nebo magnetické spínače, jak se taky pojmenovávají, slouží obecně k bezdotykové a bez opotřebení probíhající detekci poloh v řídicí technice. Jsou používány všude tam, kde již induktivní senzory z hlediska spínacích vzdáleností nestačí, protože proti nim nabízí podstatně delší spínací vzdálenosti při stejných nebo i menších rozměrech snímače. Další jejich výhodou je použití jen magnetismu. Magnetická pole totiž prochází všemi nemagnetickými materiály, a tak mohou tyto senzory rozpoznávat magnety, které jsou umístěny např. za stěnami z barevných kovů, ušlechtilé ocele, hliníku, umělých hmot nebo dřeva. Pod obecným označením "magnetický senzor" se však skrývá z pohledu principu jeho funkce hned několik možných provedeních vykazující zcela odlišný systém funkce a tím i odlišné některé provozní vlastnosti :
- Magneto-mechanický (historický) Reedův senzor
- Senzory s nasycovaným jádrem cívky = magnetoindukční
- Senzory s Hallovou sondou
- Magnetorezistivní sondy
V průmyslové praxi se pak využívají všechny principy asi stejně často, přičemž první zmíněný princip je ten nejjednodušší a využívaný pro málo náročné aplikace, zatímco druhý zmíněný je z nich nejsofistikovanější vyžadující použití elektroniky, ale poskytuje obvykle i nejlepší detekční vlastnosti.
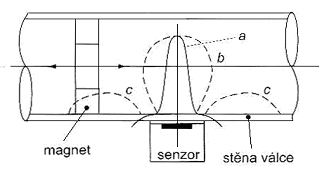
Porovnání spínací charakteristiky: a) magnetoindukčního senzoru, b) a c) senzoru s jazýčkovým relé (Reedův senzor).
Příklady použití
Magnetické senzory přiblížení lze použít v mnoha aplikacích, jako například:
- Identifikace objektu skrz nádobu z umělé hmoty.
- Identifikace objektu v agresivním prostředí přes teflonovou stěnu.
- Identifikace objektu v oblasti vysokých teplot.
- Rozpoznání daného magnetu prostřednictvím kódování.
- V elektromechanických, jeřábových, manipulačních systémech.
- Měření otáček, detekce natočení a otáčení (velmi rychle reagovat na změnu stavu).
- Měření limitů, hladin, polohy apod.
- Indikaci polohy v oblasti vysokých teplot - magnetické pole je možné přenášet magnetickými vodiči a vlastní indikaci provádět ze vzdálených míst.
- Snímání poloh pneumatických a hydraulických válců.
Klasický Reedův magnetický senzor přiblížení
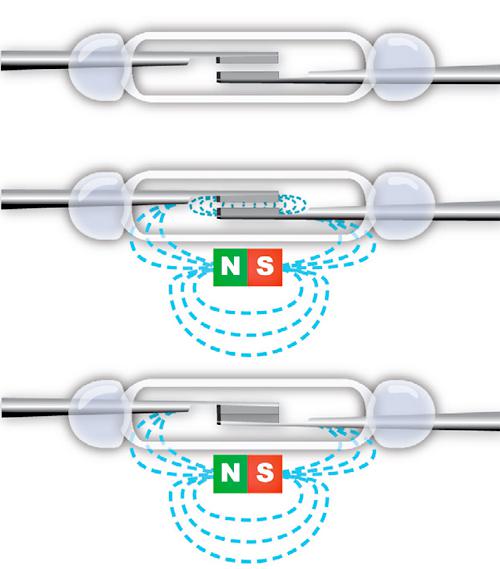 Nejjednodušší provedení, které se však stále běžně využívá v jednoduchých polohovacích aplikacích (například u dveřních spínačů nebo méně náročné detekce pozice válců apod.), je založeno na tzv. Reedově principu. Ten byl vynalezený v roce 1936 ve společnosti Bell Telephone Laboratories panem W. B. Ellwoodem a je tvořen flexibilním jazýčkovým kontaktem, který se skládá z dvou feromagnetických jazýčků uložené ve skleněné žárovkové baňce s inertním plynem. Kontakty jsou citlivé na vlivy magnetických polí, které jsou vytvářeny magnety, cívkami nebo v jeho blízkosti procházejícím elektrickým proudem. Elektrickou indukcí od přiloženého magnetického pole se vytváří ve feromagnetickém materiálu jazýčků opačná magnetická polarita, které svými protikladnými póly jazýčky přitáhne a vytvoří tak elektricky vodivé spojení kontaktů. Po odstranění magnetického pole se jazýčky vrátí do své výchozí rozpojené pozice, tedy rozepnutí kontaktů. Povrch kontaktů je potažen kvalitním materiálem (zlato, rhodium, wolfram), který podle zvoleného povlaku umožňuje napájení nízkonapěťových obvodů nebo vedení silně indukční zátěže. Tak lze spínat napětí v rozsahu 10~30V DC nebo 20~240V AC. A právě možnost přímého spínání i napětí až 250 VAC při celkových rozměrech senzoru jen několik milimetrů je hlavní praktická výhoda jejich použití v průmyslu.
Nejjednodušší provedení, které se však stále běžně využívá v jednoduchých polohovacích aplikacích (například u dveřních spínačů nebo méně náročné detekce pozice válců apod.), je založeno na tzv. Reedově principu. Ten byl vynalezený v roce 1936 ve společnosti Bell Telephone Laboratories panem W. B. Ellwoodem a je tvořen flexibilním jazýčkovým kontaktem, který se skládá z dvou feromagnetických jazýčků uložené ve skleněné žárovkové baňce s inertním plynem. Kontakty jsou citlivé na vlivy magnetických polí, které jsou vytvářeny magnety, cívkami nebo v jeho blízkosti procházejícím elektrickým proudem. Elektrickou indukcí od přiloženého magnetického pole se vytváří ve feromagnetickém materiálu jazýčků opačná magnetická polarita, které svými protikladnými póly jazýčky přitáhne a vytvoří tak elektricky vodivé spojení kontaktů. Po odstranění magnetického pole se jazýčky vrátí do své výchozí rozpojené pozice, tedy rozepnutí kontaktů. Povrch kontaktů je potažen kvalitním materiálem (zlato, rhodium, wolfram), který podle zvoleného povlaku umožňuje napájení nízkonapěťových obvodů nebo vedení silně indukční zátěže. Tak lze spínat napětí v rozsahu 10~30V DC nebo 20~240V AC. A právě možnost přímého spínání i napětí až 250 VAC při celkových rozměrech senzoru jen několik milimetrů je hlavní praktická výhoda jejich použití v průmyslu.
Tradiční "historický" princip magnetického senzoru přiblížení - Reedův senzor.
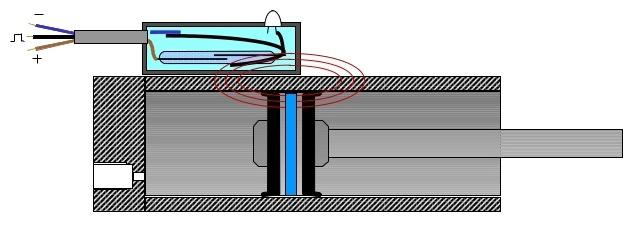
Princip jazýčkového magnetického senzoru s indikační LED pro pneumatické válce Festo.
Spínací vzdálenost závisí na používaném magnetu, maximálně však 10 cm. Nemagnetické a neželezné materiály, které jsou umístěny mezi senzor a magnet, neovlivňují jeho funkci. Jestliže je senzor nainstalován na železném povrchu, který rozptyluje magnetické proudění, je při instalaci nezbytné vkládat vhodné nemagnetické mezerníky. Reedův princip se vyznačuje spínací frekvencí až stovky Hz a poměrně dlouhou životností kontaktů (desítky až stovky milionů operací). Hlavní nevýhodou je pak vykazování tzv. opakovaného spínání, kdy při úplném horizontálním přejetí magnetu kolem snímače dojde k několikanásobnému sepnutí (viz obrázek spínacích charakteristik uvedený výše).
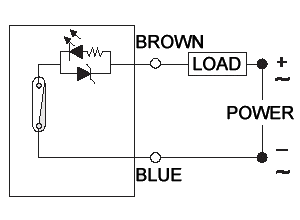
Obvyklý princip spínání - NO (Normally Open) nebo NO/NC (NC = Normally Closed) a provedení i s indikační LED.


Ukázka průmyslových provedení Reedova senzoru - zleva válcové, dveřní a pro T-držáku pneumatických válců.
Magnetoindukční senzory přiblížení = senzory s nasycovaným jádrem cívky
Z pohledu praktického používání relativně novým principem, který bylo možné použít až se zvládnutím technologie amorfního kovu, jsou magnetické senzory s nasycovaným jádrem cívky. Kompletní senzor v průmyslovém provedení se pak obvykle nazývá jako magnetoindukční nebo prostě magnetický senzor.
|
Magnetoindukční senzor přiblížení ve válcovém provedení obsahuje podobné vnitřní elektrické bloky jako indukční senzor. Hlavní rozdíl je prakticky pouze ve snímači, resp. provedení cívky a jejího jádra. Obecně tedy vnitřní zapojení senzoru obsahuje několik za sebe řazených bloků elektrických obvodů:
|
Řazení bloků uvnitř běžného válcového senzoru. |

 Snímač magnetického senzoru, jak již název napovídá, využívá magnetické pole vytvořené v magnetu. Magnetické siločáry probíhají od severního pólu jižnímu. Přiblížením ocelové destičky (clonky) k magnetu, způsobí deformaci magnetických siločar. Na rozhraní dvou materiálu s rozdílnou permeabilitou se siločáry (v případě, že nejdou kolmo) lámou. Pomocí feromagnetických předmětů se tak dají siločáry nasměrovat dle potřeby.
Snímač magnetického senzoru, jak již název napovídá, využívá magnetické pole vytvořené v magnetu. Magnetické siločáry probíhají od severního pólu jižnímu. Přiblížením ocelové destičky (clonky) k magnetu, způsobí deformaci magnetických siločar. Na rozhraní dvou materiálu s rozdílnou permeabilitou se siločáry (v případě, že nejdou kolmo) lámou. Pomocí feromagnetických předmětů se tak dají siločáry nasměrovat dle potřeby.
Konkrétně je princip snímače s nasycovaným jádrem (magnetoindukčního senzoru) tvořen jádrem cívky z amorfního kovu. Tento materiál vykazuje vůči obvyklým krystalickým slitinám velmi vysokou permeabilitu (až 500 000), nepatrnou koercitivní sílu, nízké hysterezí ztráty a ztráty vířivými proudy. Vůči Hallovým a magnetorezistivním sondám mají vyšší citlivost.
Indukčnost celé cívky je pak závislá na reverzibilní permeabilitě jádra. Jestliže je tedy cívka buzena střídavým proudem konstantní amplitudy, který vyvolá rozkmit intenzity magnetického pole H okolo pracovního bodu, pak působením vnějšího magnetického pole dojde k posuvu bodu na magnetizační křivce. Důsledkem je snížení permeability a tím i indukčnosti cívky. Mírou intenzity mag. pole je pak měřený úbytek napětí na cívce nebo, jako v případě indukčních senzorů, změna kmitočtu a amplitudy signálu generovaného oscilátorem, kterého je cívka snímače součástí.
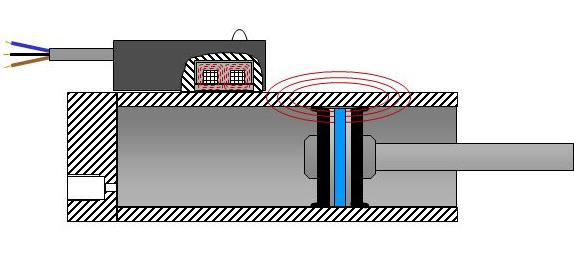
Magnetoindukční princip senzoru použitý pro detekci pozice pístu válce uzavřeného v hliníkovém nebo nerezovém válci.
|
Každý indukční senzor přiblížení vždy popisuje v katalogovém listu několik důležitých základních údajů:
|
Princip detekce magnetoindukčního senzoru . |
Funkce magnetických senzorů přiblížení závisí ještě na polarizaci magnetu. Pozor na variantu se dvěma spínacími body. Podélná magnetizace vyvolá jeden spínací bod a příčná magnetizace dva body.
Provedení magnetických senzorů je opět podobné provedení ostatních senzorů přiblížení, aby bylo možné použít stejné provedení držáků nebo otvorů, případně i připojení.
Z pohledu tvarového provedení senzoru se zde objevuje jak provedení kvádrové s různými rozměry, tak i válcové provedení. Například výrobky firmy SICK mají často rozměry 10.3 x 16 x 37 mm. V případě válcového provedení se obvykle používá rozměrů M8, M10 nebo M12. Magnetoindukční senzory se vyrábí s vysokou mechanickou ochranou proti vodě i prachu, IP65 až IP67.


Příklady provedení kvádrového a válcového magnetoindukčního senzoru firmy SICK.
Z pohledu elektrických vlastností, snímač je obvykle konstruován pro napojení do obvodů s napájením v základním rozsahu 10 - 30 V DC (stejnosměrných), u vybraných typů 20 - 60 V nebo 22 - 250 V AC (střídavých). Vyrábí se obvykle ve dvou typech vývodů:
- pro vývod je použit kabel délky obvykle 2m
- pro vývod je použit konektor
Příklad provedení výstupu kvádrového (vlevo) a válcového senzoru (vpravo) společnosti Sick.
Podle typu spínání zátěže při detekovaném přiblížení kovového předmětu lze i magnetické senzory, stejně jako ostatní senzory přiblížení, rozdělit na NPN a PNP. Mimo to se ale také uvádí další označení: NO (Normally Open) a NC (Normally Close), příp. NO/NC. Uvedené označení prakticky definuje, jaký stav sepnutí na kontaktech bude v okamžiku připojení napájení, bez přítomnosti detekovaného magnetu (magnetického pole).

Příklad PNP a NPN spínaného výstupu.
Závěr 1. dílu
 Magnetické senzory jsou obecně v průmyslu méně využívané než indukční, kapacitní, nebo optické senzory, ale mají odlišné vlastnosti, které lze využít v případech nevyhovujících jiným senzorům přiblížení. Typickým příkladem je právě aplikace snímání pístů ve válcích, kde se naopak využívají téměř výhradně. Také se vyznačují relativně velkým dosahem až do desítek centimetrů (obvykle dle použitého magnetu v těle detekovaného objektu), hůře se ruší a protože magnetické pole neomezeně prostupuje nemagnetickými materiály (tzn. i kovy jako hliník), lze je snímat přes stěny pouzder a krytů. Proto se velmi hodí i pro hermeticky zakrytové stroje kvůli požadavku na vysoké krytí nebo použití do výbučného prostředí.
Magnetické senzory jsou obecně v průmyslu méně využívané než indukční, kapacitní, nebo optické senzory, ale mají odlišné vlastnosti, které lze využít v případech nevyhovujících jiným senzorům přiblížení. Typickým příkladem je právě aplikace snímání pístů ve válcích, kde se naopak využívají téměř výhradně. Také se vyznačují relativně velkým dosahem až do desítek centimetrů (obvykle dle použitého magnetu v těle detekovaného objektu), hůře se ruší a protože magnetické pole neomezeně prostupuje nemagnetickými materiály (tzn. i kovy jako hliník), lze je snímat přes stěny pouzder a krytů. Proto se velmi hodí i pro hermeticky zakrytové stroje kvůli požadavku na vysoké krytí nebo použití do výbučného prostředí.
V 2. díle se budu podrobněji věnovat magnetorezistivním senzorům a také těm na principu Hallova jevu. V obou případech je lze z důvodu možnosti vyrobení ve velmi miniaturním provedení použít pro detekci pozice různých malých pohyblivých prvků v součástek strojů, jako například různá aplikační ramena, pneumatických či elektrických pístů a válců. Tato vlastnost je spojuje. Také obvykle tvoří hlavní detekční prvek u polohování lineárních pohonů.
Odkazy:
- Webové stránky společnosti SICK, výrobce různých magnetických senzorů: www.sick.com
- Webové stránky společnosti Festo, výrobce magnetických senzorů pro pneumatické válce: http://www.festo.cz
- Další firmy a webové stránky zabývající se mimo jiné magnetickými senzory: www.if-electronic.de, http://www.turck.cz ,https://www.baumer.com
- Martin Krupa: "Monitorování polohy a teploty objektu s využitím bezkontaktních senzorů", semestrální práce, FS VSB-TU Ostrava
- Kniha vydavatelství BEN: Ing. Radislav Martínek, "Senzory v průmyslové praxi", 2004
- Další články týkající se senzorů na serveru automatizace.HW.cz



