
Co se skrývá pod označením "řízení motorů" ?
 Posledních cca 30 let se s velkým rozvojem a rozmachem elektronického ovládání, automatizace systémů a zařízení kladou stále větší nároky i na regulaci motorů. V souladu s tím se masivně rozšířilo programové řízení motorů pomocí výkonných mikroprocesorů využívajících pulsní řízení založené na pulsně-šířkové modulaci (PWM). PWM, realizující u motorů řízení doby sepnutí (připojení) konstantního stejnosměrného napájecího napětí/proudu, je jedna z nejlepších univerzálních metod, kterou lze zároveň regulovat stejnosměrné i střídavé motory a je snadno digitálně hardwarově i softwarově realizovatelná.
Posledních cca 30 let se s velkým rozvojem a rozmachem elektronického ovládání, automatizace systémů a zařízení kladou stále větší nároky i na regulaci motorů. V souladu s tím se masivně rozšířilo programové řízení motorů pomocí výkonných mikroprocesorů využívajících pulsní řízení založené na pulsně-šířkové modulaci (PWM). PWM, realizující u motorů řízení doby sepnutí (připojení) konstantního stejnosměrného napájecího napětí/proudu, je jedna z nejlepších univerzálních metod, kterou lze zároveň regulovat stejnosměrné i střídavé motory a je snadno digitálně hardwarově i softwarově realizovatelná.
Obvykle se celkový řídicí řetězec skládá z následujících bloků:
- Řídicí jednotka (procesor se vstupy a PWM výstupy připojené na spínací tranzistorové můstky)
- Stejnosměrný nebo střídavý motor
- Případně zpětná vazba
V závislosti na tom, zda se zpětně sleduje výsledný vytvořený pohyb (otáčení) motoru a využívá se zpětně k doladění řízení, se regulace motorů rozděluje na:
- Řízení v otevřené smyčce - pouze pro nenáročnou regulaci motorů, protože se nevyužívá zpětné vazby, která hlídá výsledný běh elektromotoru a informuje o tom, zda je motor ve skluzu nebo zablokován, či zda se otáčí požadovanou rychlostí. Dá se říct, že řízení probíhá "naslepo".
- Řízení v uzavřené smyčce - průběh regulace motoru je monitorován, lze řídit rychlost otáčení, rozběh i doběh motoru apod.
Používané typy motorů a jejich provedení
Za dlouhou dobu od vzniku prvního elektromotoru bylo vynalezeno a využíváno mnoho různých principů a provedení. Některé se již téměř přestaly využívat, jiné naopak přetrvaly dodnes.
V současné době patří mezi nejběžnější typy motorů:
-
 Kartáčový (komutátorový) stejnosměrný motor (Brushed DC Motor)
Kartáčový (komutátorový) stejnosměrný motor (Brushed DC Motor) - Univerzální motor (na střídavé i stejnosměrné napětí)
- Bezkartáčový stejnosměrný motor (BLDC Motor)
- Střídavý 3fázový indukční (asynchronní) a synchronní motor (AC Motor)
- Střídavý 1fázový motor (AC Motor)
- Krokový bipolární a unipolární motor (Stepper Motor)
- Reluktanční / reakční motor (SR Motor)
Stejnosměrný komutátorový motor
 Princip tohoto motoru je založen na periodickém střídavém přepínání polarity napájecího stejnosměrného proudu pomocí komutátoru po každém otočení rotoru o 180°. Rotor je tvořen elektromagnety navinutými okolo pólových nástavců. Jejich nejběžnější počet je 3, aby se minimalizovala možnost zaseknutí. Rychlost otáčení se řídí velikostí napětí, nejjednodušeji jeho spínáním (PWM modulace napájecího napětí), kdy průměrná hodnota napájecího napětí je dána vzájemným poměrem četností stavů zapnuto / vypnuto. Toto řízení generuje šum, který je nutné filtrovat nebo se využívá vysoké frekvence spínání. Pro ochranu vinutí je nutné zapojit "vybíjecí" diodu. Spínání dává krátkodobě větší úroveň proudu a tedy i větší okamžitý točivý moment, který je proudu úměrný. Použití větší úrovně spínaného napětí rychleji nabíjí vinutí. Kartáčové komutátorové motory mají omezenou účinnost právě díky komutátoru, který limituje max. proud a napětí. Proto u nich nikdy nelze dosáhnout účinnosti BLDC či střídavých AC motorů.
Princip tohoto motoru je založen na periodickém střídavém přepínání polarity napájecího stejnosměrného proudu pomocí komutátoru po každém otočení rotoru o 180°. Rotor je tvořen elektromagnety navinutými okolo pólových nástavců. Jejich nejběžnější počet je 3, aby se minimalizovala možnost zaseknutí. Rychlost otáčení se řídí velikostí napětí, nejjednodušeji jeho spínáním (PWM modulace napájecího napětí), kdy průměrná hodnota napájecího napětí je dána vzájemným poměrem četností stavů zapnuto / vypnuto. Toto řízení generuje šum, který je nutné filtrovat nebo se využívá vysoké frekvence spínání. Pro ochranu vinutí je nutné zapojit "vybíjecí" diodu. Spínání dává krátkodobě větší úroveň proudu a tedy i větší okamžitý točivý moment, který je proudu úměrný. Použití větší úrovně spínaného napětí rychleji nabíjí vinutí. Kartáčové komutátorové motory mají omezenou účinnost právě díky komutátoru, který limituje max. proud a napětí. Proto u nich nikdy nelze dosáhnout účinnosti BLDC či střídavých AC motorů.
Univerzální motor
Univerzální motory jsou variací stejnosměrných kartáčových motorů a je možné je provozovat jak na stejnosměrné, tak i na střídavé napětí a proud. Rotor tvoří kotva (rotor s komutátorem) zapojená v sérii se statorem. Tyto motory mohou pracovat se stejnosměrným i střídavým proudem. U motorů na střídavý proud musí být stator složen z plechů. Reverzace se provádí přepólováním buď statoru, nebo rotoru. Né však zároveň. Možnosti řízení jsou však velmi omezené, běžné je jen dvouúrovňové řízení rychlosti diodou. Univerzální motory nejsou vhodné pro moderní elektronické spotřebiče. Jejich točivý moment je maximální při pomalých otáčkách a naopak minimální při otáčkách vysokých.
Stejnosměrný BLDC motor
 Bezkartáčový BLDC motor (Brushless DC motor) patří do kategorie stejnosměrných, i když je strukturou podobný střídavému 3fázovému synchronnímu motoru. Z tohoto důvodu nelze na motor připojit přímo stejnosměrné napětí ze zdroje, ale je nutné provádět jeho spínání. Stator je běžně tvořen 3 budícími vinutími zapojenými do hvězdy, i když menší motory někdy mají jen 2, přičemž stejnosměrné napájecí napětí se střídavě připojuje ke dvěma ze tří vinutí nebo celé napětí k jednomu a 1/2 napětí na zbylá dvě vinutí. Rotor je tvořen permanentními magnety a může být v provedení vnitřním, vnějším nebo paralelně se statorem. Proud vinutími se sekvencuje, přičemž se 3fázový průběh simuluje současným napájením vždy jen 2 vinutí, každé opačným směrem proudu (jedno pozitivním, druhé negativním). Spínání uvnitř sekvencích se realizuje PWM modulací aplikované tak, aby se vytvořil efekt sinusového průběhu.
Bezkartáčový BLDC motor (Brushless DC motor) patří do kategorie stejnosměrných, i když je strukturou podobný střídavému 3fázovému synchronnímu motoru. Z tohoto důvodu nelze na motor připojit přímo stejnosměrné napětí ze zdroje, ale je nutné provádět jeho spínání. Stator je běžně tvořen 3 budícími vinutími zapojenými do hvězdy, i když menší motory někdy mají jen 2, přičemž stejnosměrné napájecí napětí se střídavě připojuje ke dvěma ze tří vinutí nebo celé napětí k jednomu a 1/2 napětí na zbylá dvě vinutí. Rotor je tvořen permanentními magnety a může být v provedení vnitřním, vnějším nebo paralelně se statorem. Proud vinutími se sekvencuje, přičemž se 3fázový průběh simuluje současným napájením vždy jen 2 vinutí, každé opačným směrem proudu (jedno pozitivním, druhé negativním). Spínání uvnitř sekvencích se realizuje PWM modulací aplikované tak, aby se vytvořil efekt sinusového průběhu.
Rychlost otáčení se řídí frekvencí (časováním) sekvencování, zatímco střídou a frekvencí impulsů uvnitř sekvencí se určuje "hladkost" běhu. Z tohoto pohledu je řízení v otevřené smyčce (bez zpětné vazby) problematické zvláště, když se motor má rozbíhat již zatížen. Proto se obvykle využívá uzavřené regulační smyčky, kde se pozice (natočení) určuje buď měřením proudu Hallovým senzorem nebo absolutním či inkrementálním rotačním enkodérem. Točivý moment je definován velikostí proudu, přičemž vysokonapěťové impulsy vytvářejí stejný efekt.
U stejnosměrných BLDC motorů, které se jsou konstrukčně podobné s 3fáz. motory, se nahrazuje soustava fázově posunutých sinusovek postupným přikládáním dvou úrovní stejnosměrného napětí (High a Low) na budicí statorová vinutí (kombinace HLL odpovídá vrcholu sinosuvky na příslušném vinutí, zatímco HHL odpovídá středu).
Střídavý 3fázový motor
Všechny střídavým napětím napájené 3fázové motory mají 3 pevná budící vinutí (stator) napájená napětím/proudem vzájemně posunutý o 120° (fáze U, V a W), čímž se vytváří točivé magnetické pole. Podle provedení rotoru se pak rozlišují dvě základní provedení:
-
Synchronní motor - rotor je tvořený buď permanentními magnety nebo prostřednictvím kartáčů stále napájenými elektromagnety. Otáčení (pohyb) rotoru přesně sleduje točivé magnetické pole statoru. tzn. rotor se otáčí synchronně. Rychlost se řídí změnou frekvence.
-
Indukční asynchronní motor - rotor je
 tvořený tyčovou klecí spojenou nakrátko (squirrel cage), tzv. rotor s kotvou nakrátko. Proměnné magnetické pole tvořené statorem indukuje v kleci proud, který vytváří vlastní magnetické pole. Pole statoru a rotoru se navzájem odpuzuje a tak se rotor otáčí. Proud se však v kleci vytváří a ztrácí v porovnání se statorem se zpožděním a tedy i otáčení rotoru je zpožděné za točivým mag. polem statoru, tedy otáčí se asynchronně. Rychlost se opět řídí také změnou frekvence. Rychlost lze řídit i při pevné frekvenci pomocí spínání triaků, ale motor rychle ztrácí točivý moment.
tvořený tyčovou klecí spojenou nakrátko (squirrel cage), tzv. rotor s kotvou nakrátko. Proměnné magnetické pole tvořené statorem indukuje v kleci proud, který vytváří vlastní magnetické pole. Pole statoru a rotoru se navzájem odpuzuje a tak se rotor otáčí. Proud se však v kleci vytváří a ztrácí v porovnání se statorem se zpožděním a tedy i otáčení rotoru je zpožděné za točivým mag. polem statoru, tedy otáčí se asynchronně. Rychlost se opět řídí také změnou frekvence. Rychlost lze řídit i při pevné frekvenci pomocí spínání triaků, ale motor rychle ztrácí točivý moment.

Vzájemný fázový posun 120° třech sinusových fázových napětí U, V a W připojené na 3 statorová vinutí, sám osobě realizuje točivé magnetické pole. V případě PWM řízení je toto nutné realizovat sekvencováním.
Střídavý 1fázový motor
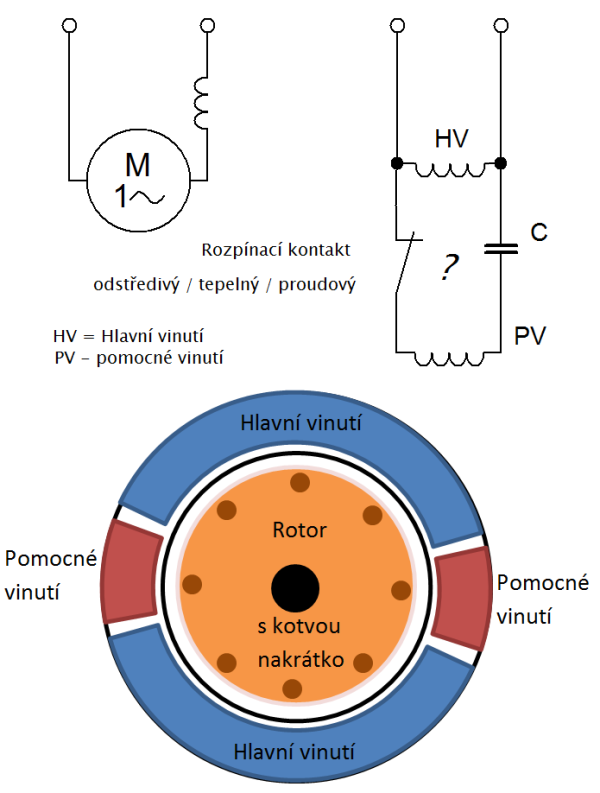
Jednofázový motor, též známý jako motor s rozběhovým kondenzátorem nebo kondenzátorový motor, není jen zjednodušenou verzí motoru třífázového. Protože nelze provozovat, resp. hlavně rozběhnout, střídavým napětím napájený motor jen jednofázovou fází, musí být konstrukce 1fázového motoru s jedním budicím statorovým vinutím doplněna o další pomocné (rozběhové) vinutí.
Podle provedení rozběhové vinutí, se 1fázové motory obvykle vyskytují ve dvou provedeních:
-
Motor se stínovým pólem - obsahuje jedno hlavní vinutí a pomocná vinutí realizovaná jednoduchými měděnými smyčkami, vytvářející potřebné fázové zpoždění. Jeho pozice určuje směr otáčení. Takto provedený motor se vyznačuje velmi nízkým točivým momentem a je tedy vhodný pouze pro větráky a jiné podobné účely, kde rotor je zatížen jen velmi malou zátěží.
-
Motor s rozběhovou fází - hlavní vinutí je doplněno pomocným vinutím připojeným k hlavnímu přes kondenzátor, který vytváří potřebné minimální fázové zpoždění. Motor se vyznačuje obtížným rozběhem, což limituje jeho trvalé mechanické zatížení, resp. hlavně zatížení při rozběhu.
Dá se říct, že obecně se jednofázové motory vyznačují ne úplně pravidelným chodem, dané jednofázovým buzením a tedy generováním vibrací, více se zahřívají, hůře se rozbíhají a hůře pracují na nízkých nebo hodně vysokých otáčkách. Rychlost otáčení je podobně jako u 3fázových motorů dána frekvencí budicího napětí. Elektronické řízení rychlosti se tedy provádí pomocí změny nebo generování potřebné frekvence. To provádí frekvenční měnič, dnes obvykle založen na PWM modulaci.
Obecně se však v dnešní době díky nízké ceně elektroniky již obvykle místo 1fázových asynchronní motorů volí 3fázové asynchronní motory (3x230V) zapojené do trojúhelníka na frekvenční měnič s 1fázovým napájením 230 VAC (L, N, PE). Mají bezproblémový rozběh, klidný chod a již k dispozici i regulaci otáček.
Krokové motory
Krokové motory se podle konstrukce rozdělují na dvě následující varianty:
-
 Bipolární krokové motory
Bipolární krokové motory - Unipolární krokové motory
U bipolárního motoru je stator podobný jako u BLDC motoru, ale běžně obsahuje pouze 2 vinutí (dva páry napájecích vodičů). Rotor je tvořen permanentními magnety s póly (zuby), které jsou přitahovány "zuby" statorového vinutí. Přesnost krokování je dána počtem zubů rotoru (někdy jich obsahuje i několik stovek). Motor dokáže zastavit a zůstat stát na konkrétní pozici zubu nebo na 1/2 pozici (mezi zuby), přičemž síla držní motoru na místě je dána velikostí proudu. Pro jedno celé otočení (jednu otáčku) je nutné výrazně více sekvencí než u BLDC motoru = složitější řízení a zpracování. Nejběžnější je tedy bipolární provedení s dvěma páry vodičů, které umožňuje dopředný i zpětný chod, krokování po 1/2 kroku či mikrokrokování pomocí současného buzení obou vinutí.
Unipolární provedení je tvořeno 6 vodiči (3 páry), i když běžněji jen 4 (jeden společný vodič místo třech), přičemž neumožňuje reverzaci, ale pouze dopředný chod daný vždy napájením jednoho vodiče každého páru.
Synchronní reluktanční motor (Reakční motor)
Reakční motor lze zkráceně popsat jako kombinace BLDC a unipolárního krokového motoru. Podobně jako krokový motor má rotor pólové nástavce (zuby) tvořené velmi silnými magnety, ale jejich počet je výrazně menší (stejně jako statorových pólů). Stator má 3 vinutí, která však nejsou vzájemně propojena, tzn. do motoru jsou přivedeny regulérní 3 páry napájecích vodičů napájené. Vinutí jsou buzena jen v jednom směru a magnetický tok se uzavírá přes části rotoru s menší vzduchovou mezerou. Rotor má tak vlastní vyniklé póly, které brání skluzu – motor má synchronní otáčky. Indukce je téměř lineární od minima až do maxima. Minimální, když zub rotoru je nejdále od vinutí a maximální, když je zub v zákrytu s vinutím. Často se u tohoto motoru průběh indukce označuje jako trojúhelníková. Kvůli větším vzduchovým mezerám má motor menší účinnost, než odpovídající asynchronní motor. Přetížení vede k asynchrnonnímu běhu se skluzem.
Obecně vždy potřebuje mít zpětnou vazbu k zajištění hladkého chodu. V případě bezsenzorového provedení se alespoň měří proud vinutími. Princip a konstrukce reakčního motoru se spíše používá pouze pro velké motory.
Závěr
Druhý díl pak stručně shrne principy řízení zde uvedených typů motorů a principy zpětných vazeb pro realizace uzavřených regulačních smyček.
Odkazy:
- Stránky společnosti Freescale Semiconductor, výrobce MCU a periferií pro řízení motorů - www.freescale.com
- Stránky společnosti Luminary Micro, výrobce speciálních MCU pro řízení motorů - www.luminarymicro.com
-
Článek "Přehled zapojení motorů": http://mylms.cz/text-prehled-a-zapojeni-motoru/
- Další články o motorech a řídích obvodech najdete na serveru automatizace.HW.cz




Komentáře
Váš názor
Děkuji za zajímavý článek o řízení motorů. Mám dotaz, zda má někdo zkušenosti s těmito DC kartáčovými motory, zejména ohledně jejich životnosti a hlučnosti při provozu. Jak si stojí v porovnání s bezkartáčovými motory v náročnějších aplikacích?