Pro řízení válečkových dopravníků a pohybu objektů po nich mohou dobře posloužit speciální senzory - optozávory firmy SICK. Ty svým speciálním tvarem lze umístit mezi válečky dopravníku a navíc pokytují rozhtraní pro pneumatický ventil stlačeného vzduchu. To umožňuje přímo řídit pneumatická zařízení jako jsou pohony, seperátory, výhybky apod.


 Stále
více automatizované provozy a linky vyžadují kvalitní a přesné automatické
řízení pohybů produktů po dopravnících. Jedním z často využívaných typů dopravníků
v oblasti balení a přepravy zabalených předmětů jsou válečkové dopravníky. Pro
tyto účely existují speciální optosenzory určené pro zabudování do mezer mezi
válečky a tedy jsou chráněny jak proti poškození, tak nezabírají místo
v prostoru nad dopravníkem. V případě rozsáhlejších a složitějších linek, kdy
produkty často přejíždějí mezi různými dopravníky, umožňují jednoduché řízení
"provozu" - koordinovanému zastavování různých sekcí dopravníků.
Velkou výhodou uvedených senzorů je rozhraní pro přímé ovládání ventilu
stlačeného vzduchu.
Stále
více automatizované provozy a linky vyžadují kvalitní a přesné automatické
řízení pohybů produktů po dopravnících. Jedním z často využívaných typů dopravníků
v oblasti balení a přepravy zabalených předmětů jsou válečkové dopravníky. Pro
tyto účely existují speciální optosenzory určené pro zabudování do mezer mezi
válečky a tedy jsou chráněny jak proti poškození, tak nezabírají místo
v prostoru nad dopravníkem. V případě rozsáhlejších a složitějších linek, kdy
produkty často přejíždějí mezi různými dopravníky, umožňují jednoduché řízení
"provozu" - koordinovanému zastavování různých sekcí dopravníků.
Velkou výhodou uvedených senzorů je rozhraní pro přímé ovládání ventilu
stlačeného vzduchu.
Použití speciálních optosenzorů pro dopravníky
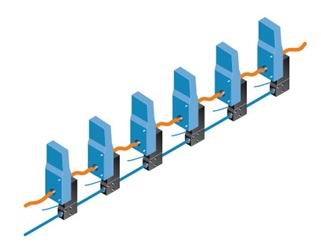
Optozávory pro válečkové dopravníky se nejčastěji využívají ve větším počtu v sériovém vzájemném propojení pro řízení pohybu objektu po dopravníku. Umožňují tak dle potřeby řízení zastavovat dopravované objekty v různých sekcích dopravníku a vytvářet tak například fronty s pevnými mezerami mezi objekty.
Obr. 1. Sériové propojení n senzorů podél jednoho dopravníku
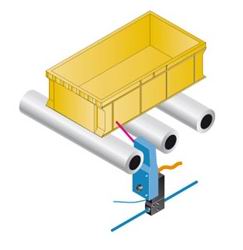
Obr. 2. Příklad řízení přechodu výrobků z horizontálního dopravníku na vertikální pomocí speciálních optosenzorů WTR firmy SICK
Tímto způsobem lze jednoduše řídit přechod objektů z jednoho dopravníku na jiný tak, aby nedošlo ke vzájemné kolizi několika objektů. Například na obrázku 3. dochází k zastavení objektů přecházejících z horizontálních dopravníků na vertikální. Nejenže řízení zamezuje kolizi vertikálně a horizontálně jdoucích předmětů, ale snímače při zastavování zajišťují vznik čekací fronty s definovanými rozestupy (mezerami) mezi objekty. Sériové propojení snímačů umožňuje automatické zastavení objektu na pozici snímače WTR n-1, pokud již na pozici WTR n čeká stojící objekt. Snímač WTR n totiž předává signál o zastavení objektu následujícímu snímači v řadě. Jakmile na tuto pozici dorazí libovolný objekt a je snímačem WTR n-1 vydetekován, vypne se jeho pohyb. Je tak zajištěna definovaná mezera mezi objekty ve frontě.
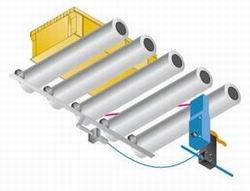
Obr. 3. Zastavování objektů na horizontálních dopravnících
Pokud to podmínky sledované opět soustavou snímačů na vertikálním dopravníku dovolí, jsou postupně objekty uvolňovány. Řízení na dopravníku tak odpovídá systému FIFO (First In, First Out) - viz obrázek 4.
Obr. 4. Příklad řízení provozu pohybu objektů po dopravnících
WTR a WLR řada firmy SICK
 Řada
optických WTR a WLR firmy SICK je speciálně vyvinutá právě pro výše popsané
použití ve válečkových dopravnících. Pro tento účel je vytvořen i speciální tvar
s odděleným vysílačem paprsku umístěným v horní úzké části pouzdra a přijímačem
jehož rozměrnější vstupní okénko je v širší spodní části senzoru. Úzká horní
část pak umožňuje ji zastrčit do prostoru mezi dva válečky dopravníku.
Řada
optických WTR a WLR firmy SICK je speciálně vyvinutá právě pro výše popsané
použití ve válečkových dopravnících. Pro tento účel je vytvořen i speciální tvar
s odděleným vysílačem paprsku umístěným v horní úzké části pouzdra a přijímačem
jehož rozměrnější vstupní okénko je v širší spodní části senzoru. Úzká horní
část pak umožňuje ji zastrčit do prostoru mezi dva válečky dopravníku.
Obr. 5. Nastavení senzoru pro správnou detekci objektu na dopravníku
Princip detekce je následující:
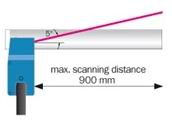 Vysílač
vysílá pod úhlem 5° paprsek světla, který je buď odražen zpět od přítomného
detekovaného objektu (senzory WTR) nebo reflexní pásky (senzory WLR) do optiky
přijímače nebo není odražen a přijímač paprsek neobdrží. V případě difuzních
senzorů WTR je zachycení paprsku na přijímači vyhodnocena jako přítomnost
objektu, zatímco u reflexních senzorů WLR naopak jeho nepřítomnost. Na obrázku
5. je
vidět, že pro správnou detekci objektu na dopravníku je nutné zvolit vhodné
umístění senzoru a hlavně jeho naklonění pod určitým úhlem vzhledem k horizontální
rovině. V opačném případě může posunutí objektu podle šířky dopravníku způsobit,
že ten pak nebude detekován.
Vysílač
vysílá pod úhlem 5° paprsek světla, který je buď odražen zpět od přítomného
detekovaného objektu (senzory WTR) nebo reflexní pásky (senzory WLR) do optiky
přijímače nebo není odražen a přijímač paprsek neobdrží. V případě difuzních
senzorů WTR je zachycení paprsku na přijímači vyhodnocena jako přítomnost
objektu, zatímco u reflexních senzorů WLR naopak jeho nepřítomnost. Na obrázku
5. je
vidět, že pro správnou detekci objektu na dopravníku je nutné zvolit vhodné
umístění senzoru a hlavně jeho naklonění pod určitým úhlem vzhledem k horizontální
rovině. V opačném případě může posunutí objektu podle šířky dopravníku způsobit,
že ten pak nebude detekován.
Obr. 6. Příklad detekce přepravky pomocí senzoru WTR firmy SICK
Pro účely dopravníku jsou tyto optické senzory vybaveny nejen logickými spínanými PNP výstupy, ale některé i rozhraním pro přímé připojení k pneumatickému ventilu 3/2 pro řízení tlaku (toku) stlačeného vzduchu. Pneumatické ovládání různých mechanických prvků stlačeným vzduchem (pohonů, separátorů, výhybek, odstrkovačů, odfukovačů) je v oblasti dopravníků běžná a právě kompaktní provedení ventilu a senzoru výrazně zjednodušuje provedení celého řízení linky. 3/2cestný ventil umožňuje přepínat tok stlačeného vzduchu mezi dvěmi cestami a tak podle okolnosti vybavovat pneumatický akční člen. Spínané logické výstupy PNP zase umožňují řídit elektrické prvky linky, přes relé a stykače pak i pohony. V případě reflexního optosnímače, pokud objekt přeruší paprsek světla, vybaví se (sepne) výstup. Stejně tak se přepne pneumatický ventil s polohy blokace vzduchu na propustný výstup, kterým se pak může vybavit odlučovací zařízení nebo spustit (zastavit) pohon dopravníku.
Obr 7. Sériové elektrické i pneumatické propojení senzorů například podél jednoho dopravníku
Výhodou uvedených senzorů je vnitřní logika s možností sériového propojení povolovacích vstupů E a výstupů A. Tak pak dochází k předávání informace od jednoho senzoru k druhému (vedlejšímu) proti směru přepravy FR. Pokud není u daného senzoru nastaven vstup E, tak se ani při detekci objektu výstup nepřepne a tak například nedojde k zastavení dopravníku. Pokud tak na pozici senzoru WTR (n) již stojí zastavený objekt, je nastaven vstup E následujícího senzoru WTR(n-1) a ten po detekci objektu jej také zastaví. Pokud není vstup E nastaven, není ani detekovaný objekt zastaven a nechá se projít dále.
Obr. 8. Vzájemné sériové propojení rozhraní senzorů - napájení (svorky L+ a M), vstupů a výstupů (E a A)
Hlavní parametry senzorů WTR a WLR:
- Skenovací vzdálenost TW: 250 ... 5000 mm (nastavitelná, některé typy řady mají nižší)
- Zdroj světla: červená nebo infra LED
- Reakce na paprsek: spínání světlem nebo tmou
- Elektrický výstup:
- Spínaný logický výstup: PNP (stav HIGH = Vs – 2 V, stav LOW = 0 V), výstupní proud: do 100 mA
- Časová odezva: okolo 2 ms
- Spínací frekvence: max. 250 Hz
- Připojení: 4vodičovým kabelem délky 1.2 m, 4pinový konektor M12
- Pneumatický výstup:
- 3/2-cestný ventil
- Tok stlačeného vzduchu: P -› A, B: cca 20 NI/min
- Kapacita ventilace: A, B -› R: cca 130 NI/min
- Pracovní rozsah tlaku vzduchu: 0... 8 bar
- Solenoid ventil pro tlačený vzduch a filtrované neutrální plyny
- Pracovní mód: ventil otevřený v režimu bez proudu
- Napájení Vs: 24 V DC nebo 10 ... 30 V DC
- Stupeň krytí: IP 54 nebo IP65
- Pracovní teplotní rozsah: – 15 °C ... + 50 °C nebo – 40 °C ... + 60 °C
Obr. 9. Základní vzdálenosti pro instalaci senzorů - x = skenovací vzdálenost, y = přechodná vzdálenost mezi x a potlačeným pozadím z
Závěr
Pro speciální aplikace se hodí speciální senzory. Výše uvedené optosenzory umožňují efektivně provádět řízení více dopravníků v lince, kde možnost sériového propojení snižuje množství kabeláže a zjednodušuje řídící logiku. Senzory s pneumatickými ventily navíc mohou přímo bez přídavných prvků řídit pneumatické akční členy. Odpadají tak meziprvky, pro které bylo nutné nalézt vhodné upevňovací místo.
Antonín Vojáček
vojacek@ hwg.cz
DOWNLOAD & Odkazy
- Domovská stránka české pobočky firmy SICK, výrobce senzorů - www.sick.cz
- Domovská stránka firmy SICK, výrobce senzorů - www.sick.com
- Článek o správné volbě optozávory na stránkách automatizace.HW.cz
- Článek o optických senzorech přiblížení na stránkách automatizace.HW.cz
- Článek o utrazvukových senzorech přiblížení na stránkách automatizace.HW.cz
- Článek o kapacitních senzorech přiblížení na stránkách automatizace.HW.cz
- Článek o indukčních senzorech přiblížení na stránkách automatizace.HW.cz



