
Co je RoboDK?
 RoboDK je výkonný a cenově výhodný programátor a simulátor pro průmyslové roboty, který umožňuje dostat z libovolného robota maximum jeho schopností. Intuitivní rozhraní RoboDK nevyžaduje žádné programovací dovednosti, protože lze snadno naprogramovat jakéhokoli robota offline pomocí několika kliknutí. Rozsáhlá knihovna s více než 1000 robotickými rameny všech známých výrobců průmyslových robotů a použití simulačních a offline programovacích nástrojů umožňuje programovat roboty v klidu mimo produkční prostředí. S RoboDK tak lze programovat roboty přímo z počítače a eliminovat tak prostoje ve výrobě způsobené programováním v dílně.
RoboDK je výkonný a cenově výhodný programátor a simulátor pro průmyslové roboty, který umožňuje dostat z libovolného robota maximum jeho schopností. Intuitivní rozhraní RoboDK nevyžaduje žádné programovací dovednosti, protože lze snadno naprogramovat jakéhokoli robota offline pomocí několika kliknutí. Rozsáhlá knihovna s více než 1000 robotickými rameny všech známých výrobců průmyslových robotů a použití simulačních a offline programovacích nástrojů umožňuje programovat roboty v klidu mimo produkční prostředí. S RoboDK tak lze programovat roboty přímo z počítače a eliminovat tak prostoje ve výrobě způsobené programováním v dílně.
 Simulace a offline programování průmyslových robotů jsou pomocí RoboDK poměrně jednoduché. Lze si rychle vytvořit virtuální prostředí pro simulaci konkrétní aplikace a následně snadno vygenerovat programy robota offline pro jakýkoli ovladač robota bez potřeby se učit specifické programování pro každého výrobce / dodavatele robotů. Programy lze exportovat do zvoleného typu robota, protože v RoboDK integrované postprocesory podporují mnoho ovladačů různých výrobců robotů, například ABB RAPID (mod/prg), Fanuc LS (LS/TP), KUKA KRC/IIWA (SRC/java), Motoman Inform (JBI), Universal Robots (URP/script) a další.
Simulace a offline programování průmyslových robotů jsou pomocí RoboDK poměrně jednoduché. Lze si rychle vytvořit virtuální prostředí pro simulaci konkrétní aplikace a následně snadno vygenerovat programy robota offline pro jakýkoli ovladač robota bez potřeby se učit specifické programování pro každého výrobce / dodavatele robotů. Programy lze exportovat do zvoleného typu robota, protože v RoboDK integrované postprocesory podporují mnoho ovladačů různých výrobců robotů, například ABB RAPID (mod/prg), Fanuc LS (LS/TP), KUKA KRC/IIWA (SRC/java), Motoman Inform (JBI), Universal Robots (URP/script) a další.
Příklady použití
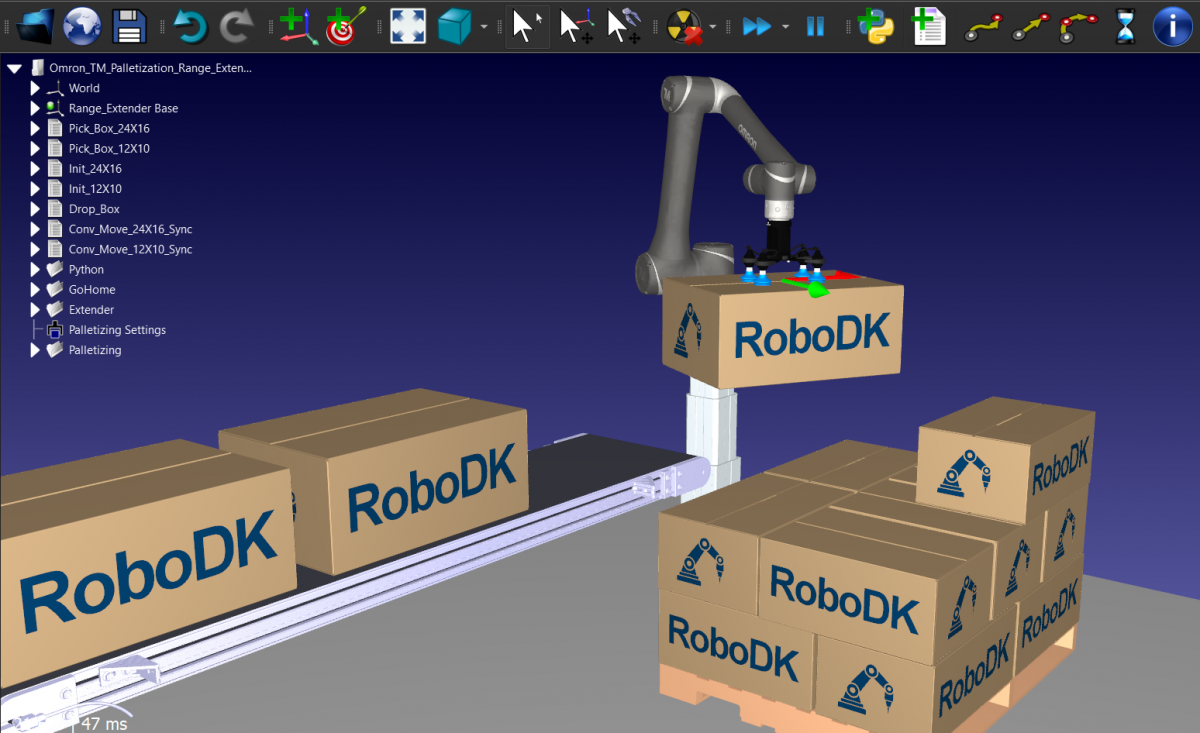
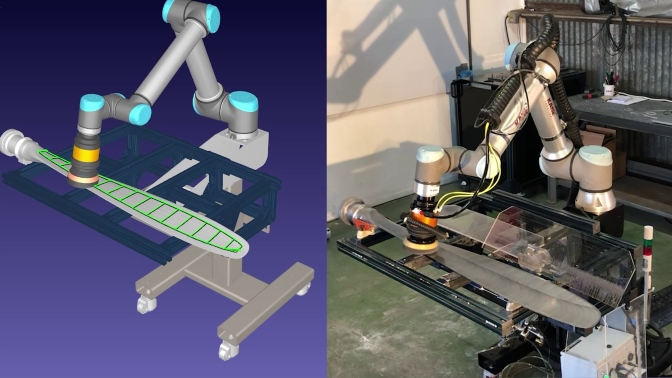
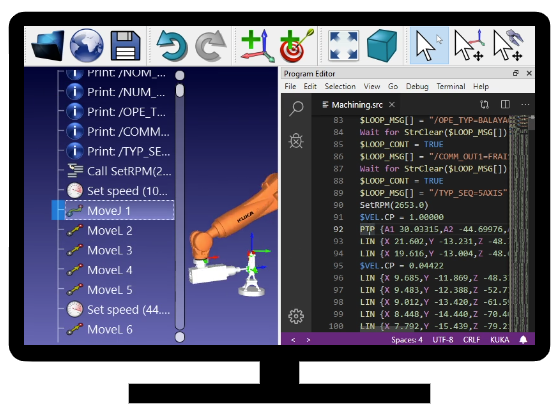
 Jedním z typických příkladů použití robotického ramene naprogramovaného pomocí RoboDK je aplikace 5osé frézky (CNC) nebo průmyslové velké 3D tiskárny. Pomocí RoboDK lze totiž simulovat a převádět NC programy na programy robotů (například soubory G-code nebo APT-CLS), přičemž RoboDK automaticky optimalizuje dráhu robota a vyhne se singularitám, limitům os a kolizím. Navíc rozsáhlá knihovna ramen, externích os a nástrojů od více než 50 různých výrobců robotů zjednodušuje použití jakéhokoli robota pro jakoukoli aplikaci, jako je obrábění, svařování, řezání, lakování, kontrola, odstraňování otřepů a další.
Jedním z typických příkladů použití robotického ramene naprogramovaného pomocí RoboDK je aplikace 5osé frézky (CNC) nebo průmyslové velké 3D tiskárny. Pomocí RoboDK lze totiž simulovat a převádět NC programy na programy robotů (například soubory G-code nebo APT-CLS), přičemž RoboDK automaticky optimalizuje dráhu robota a vyhne se singularitám, limitům os a kolizím. Navíc rozsáhlá knihovna ramen, externích os a nástrojů od více než 50 různých výrobců robotů zjednodušuje použití jakéhokoli robota pro jakoukoli aplikaci, jako je obrábění, svařování, řezání, lakování, kontrola, odstraňování otřepů a další.
RoboDK offline programování
 Offline programování (nebo Off-line programování) znamená programování robotů mimo produkční prostředí a eliminuje prostoje ve výrobě způsobené programováním v dílně. Offline simulace navíc umožňuje studovat různé scénáře pracovní buňky robota před nastavením produkční buňky. Chyby, které se běžně dělají při navrhování pracovní buňky, lze tak včas předvídat a vyhnout se jim.
Offline programování (nebo Off-line programování) znamená programování robotů mimo produkční prostředí a eliminuje prostoje ve výrobě způsobené programováním v dílně. Offline simulace navíc umožňuje studovat různé scénáře pracovní buňky robota před nastavením produkční buňky. Chyby, které se běžně dělají při navrhování pracovní buňky, lze tak včas předvídat a vyhnout se jim.
Základní kroky: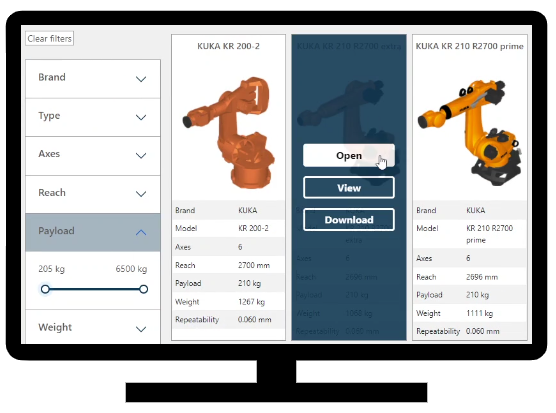
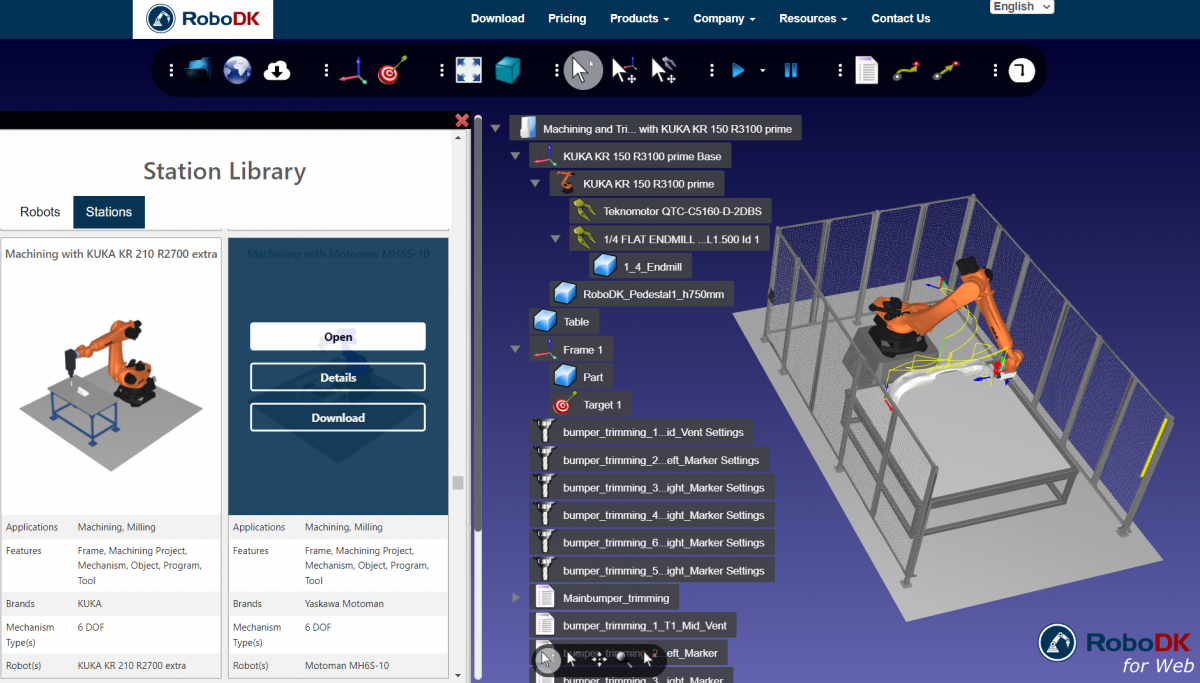
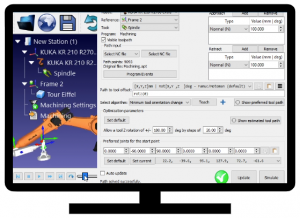
- 1. Výběr robota - výběr robota se provádí z rozsáhlé knihovny robotů přímo z softwaru RoboDK. Knihovna totiž obsahuje více než 1000 robotických ramen od 50 různých výrobců robotů, včetně: ABB, Fanuc, KUKA, Yaskawa/Motoman, Universal Robots atd. Vybrat lze také vnější osy, jako jsou 1, 2 nebo 3osé točny nebo lineární kolejnice.
- 2.
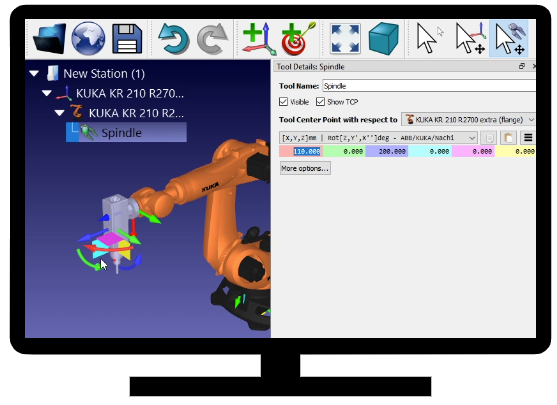
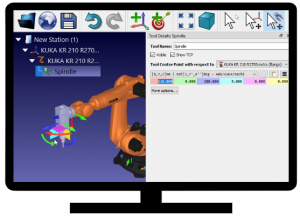 Definování nástroje - následně lze načíst 3D model požadovaného nástroje a převést jej na robotický nástroj přetažením do robota (podporované formáty zahrnují STL, STEP a IGES). Nástroj lze snadno kliknout a přetáhnout, přičemž souřadnice nástroje (TCP) lze zadat ručně stejně tak, jak je vidíte na řídicí jednotce robota. Pomocí RoboDK lze nástroje robota i kalibrovat.
Definování nástroje - následně lze načíst 3D model požadovaného nástroje a převést jej na robotický nástroj přetažením do robota (podporované formáty zahrnují STL, STEP a IGES). Nástroj lze snadno kliknout a přetáhnout, přičemž souřadnice nástroje (TCP) lze zadat ručně stejně tak, jak je vidíte na řídicí jednotce robota. Pomocí RoboDK lze nástroje robota i kalibrovat. - 3.
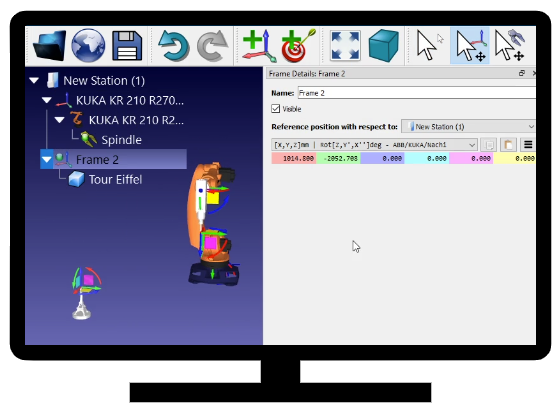
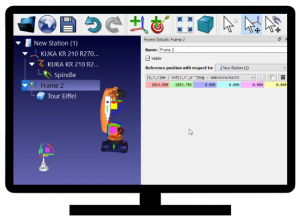 Načtení 3D modelu - pak se umístí 3D model do referenčního rámečku přetažením referenčního snímku (známý také jako souřadnicový systém robota nebo vztažný bod) pro rychlé otestování konceptu. Souřadnice lze zadat ručně tak, jak jsou vidět na ovladači robota. RoboDK pak přesně lokalizujte součást offline a vytvoří z ní své digitální dvojče.
Načtení 3D modelu - pak se umístí 3D model do referenčního rámečku přetažením referenčního snímku (známý také jako souřadnicový systém robota nebo vztažný bod) pro rychlé otestování konceptu. Souřadnice lze zadat ručně tak, jak jsou vidět na ovladači robota. RoboDK pak přesně lokalizujte součást offline a vytvoří z ní své digitální dvojče. - 4.
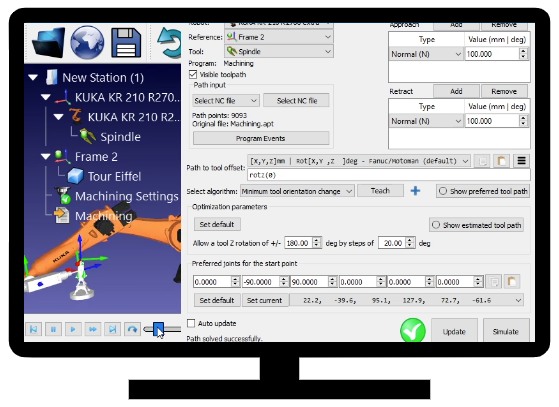
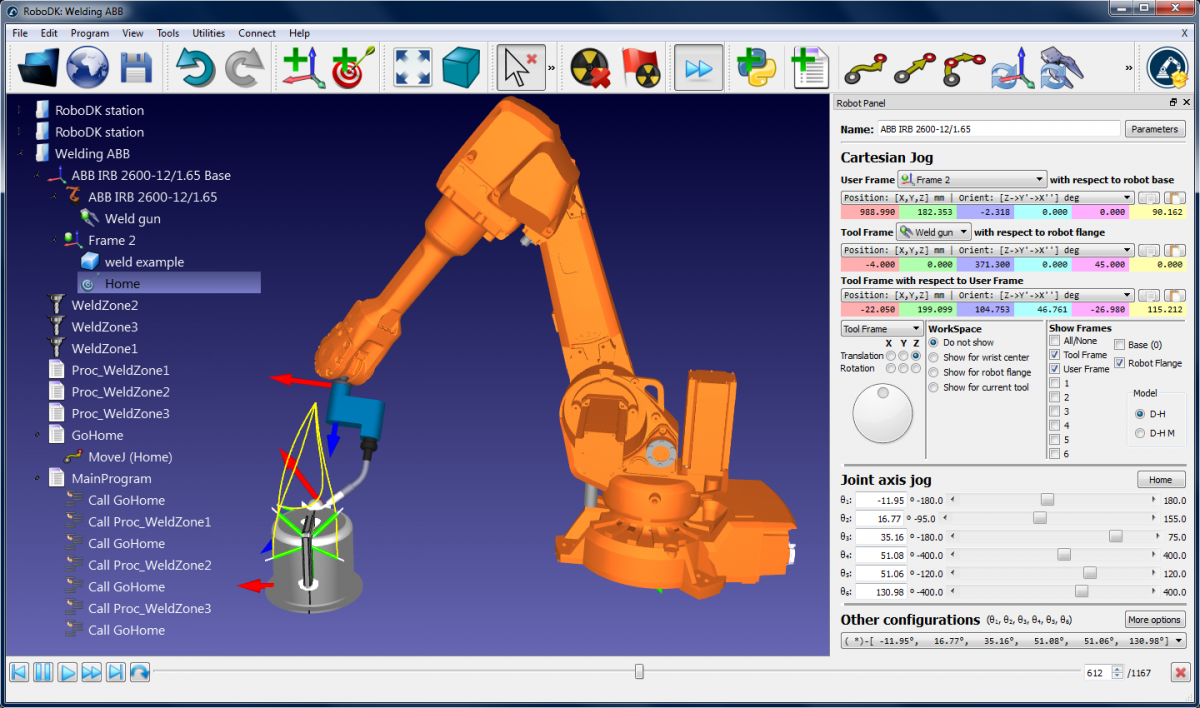
 Simulace dráhy nástroje - jeho pomocí lze vytvořit pracovní dráhu robota s automatickým vyhnutím se singularitám, limitům os a kolizím pomocí intuitivního uživatelského rozhraní RoboDK, který umožňuje i snadnou integraci se softwarem CAD/CAM, protože obsahuje přístup k zásuvným modulům pro SolidWorks, Mastercam, Fusion 360, Rhino, Alphacam, WorkNC a TopSolid.
Simulace dráhy nástroje - jeho pomocí lze vytvořit pracovní dráhu robota s automatickým vyhnutím se singularitám, limitům os a kolizím pomocí intuitivního uživatelského rozhraní RoboDK, který umožňuje i snadnou integraci se softwarem CAD/CAM, protože obsahuje přístup k zásuvným modulům pro SolidWorks, Mastercam, Fusion 360, Rhino, Alphacam, WorkNC a TopSolid. - 5.
 Vygenerování programu robota - v RoboDK lze generovat programy robotů i v offline režimu pouze kliknutími myši, přičemž díky integraci více než 70 postprocesorů, RoboDK podporuje více než 40 výrobců robotů, včetně ABB, KUKA, Fanuc, Yaskawa/Motoman, Universal Robots a dalších. Navíc pro realizaci většiny aplikací nejsou vyžadovány žádné zkušenosti s programováním, protože pomocí intuitivního rozhraní RoboDK lze snadno upravit sekvenci programu nebo automaticky rozdělit dlouhé programy, aby je bylo možné snadněji načíst do řídicí jednotky robota.
Vygenerování programu robota - v RoboDK lze generovat programy robotů i v offline režimu pouze kliknutími myši, přičemž díky integraci více než 70 postprocesorů, RoboDK podporuje více než 40 výrobců robotů, včetně ABB, KUKA, Fanuc, Yaskawa/Motoman, Universal Robots a dalších. Navíc pro realizaci většiny aplikací nejsou vyžadovány žádné zkušenosti s programováním, protože pomocí intuitivního rozhraní RoboDK lze snadno upravit sekvenci programu nebo automaticky rozdělit dlouhé programy, aby je bylo možné snadněji načíst do řídicí jednotky robota.

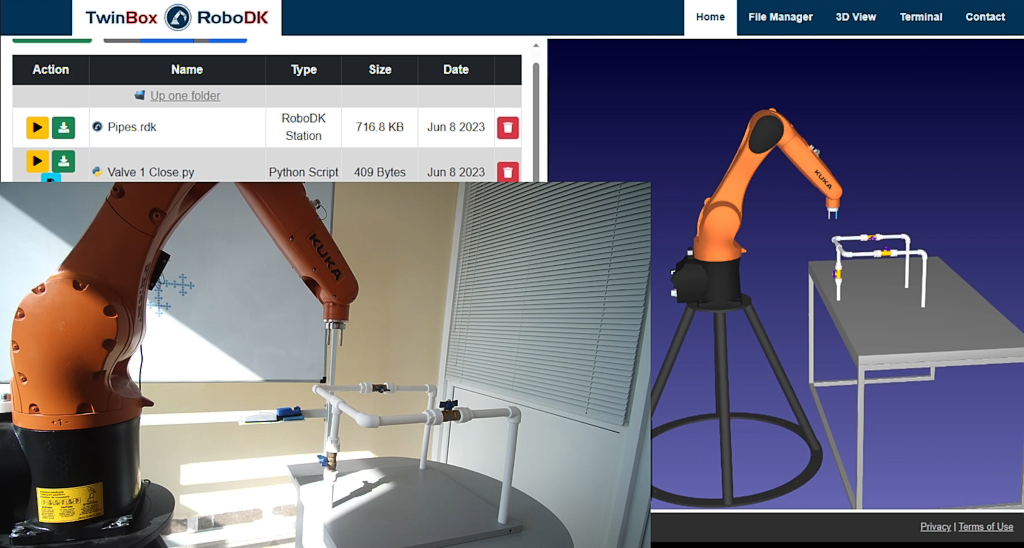
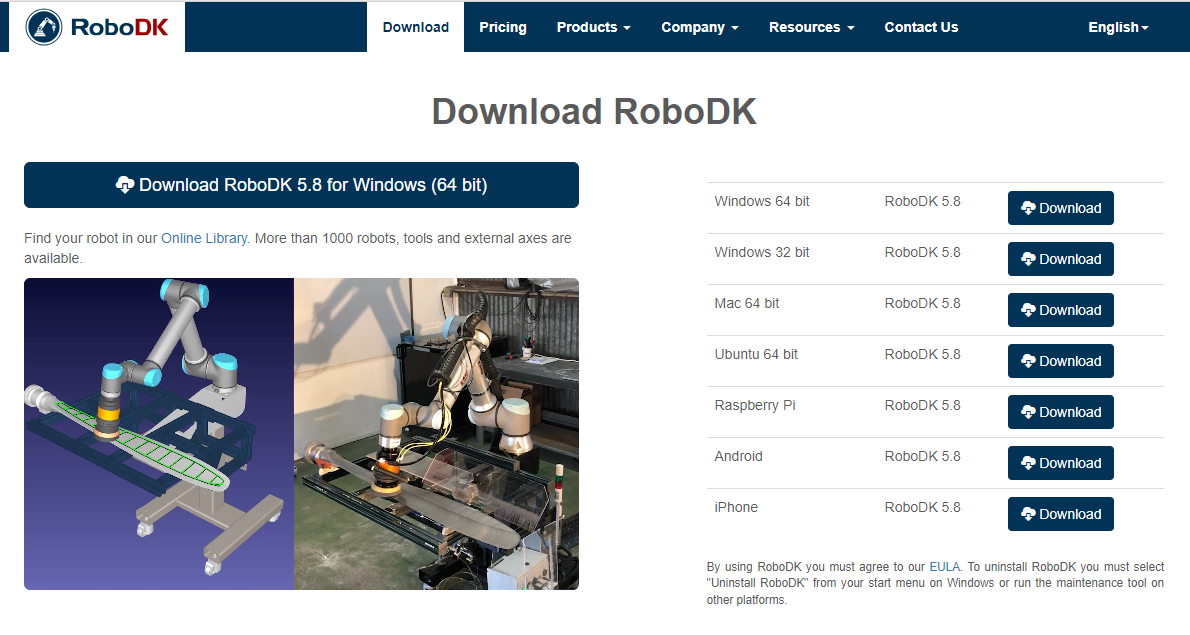
Možnosti stažení pro různé OS a i Raspberry Pi
RoboDK programovací a simulační software není k dispozici jen pro "plné" operační 64bitové systémy PC, jako Windows nebo Linux, ale v menší verzi i pro Android ve smartphonech nebo dokonce i pro Raspberry Pi OS běžící na populárních malých jednodeskových počítačích Raspberry Pi. A to dokonce již od verze 3+.
Samozřejmě verze Raspberry Pi je vhodná hlavně pro malé projekty. Výhodu ale je, že byla pro Raspberry Pi speciálně vytvořena, aby na něm běžela optimálně a proto je mírně odlišná od standardních "velkých" verzí RoboDK. Je primárně zaměřena na malé samostatné projekty programování robotů. Více informací najdete v článku https://robodk.com/blog/robodk-for-raspberry-pi/.
MSV 2024
 Kanadská společnost RoboDK Global s produktem RoboDK bude vystavovat na Mezinárodním strojírenském veletrhu, který je nejvýznamnějším průmyslovým veletrhem ve střední Evropě. Zastoupeny jsou všechny klíčové oblasti strojírenského a elektrotechnického průmyslu. Hlavním tématem MSV 2024 je Průmysl 4.0 a digitální továrna. Mezi další zvýrazněná témata patří cirkulární ekonomika. Součástí veletrhu je špičkový doprovodný program složený z odborných konferencí, seminářů a workshopů na aktuální technická, obchodní a ekonomická témata. Veletrh probíhá na Výstavišti Brno od 8.10. do 11.10.2024. https://www.bvv.cz/msv
Kanadská společnost RoboDK Global s produktem RoboDK bude vystavovat na Mezinárodním strojírenském veletrhu, který je nejvýznamnějším průmyslovým veletrhem ve střední Evropě. Zastoupeny jsou všechny klíčové oblasti strojírenského a elektrotechnického průmyslu. Hlavním tématem MSV 2024 je Průmysl 4.0 a digitální továrna. Mezi další zvýrazněná témata patří cirkulární ekonomika. Součástí veletrhu je špičkový doprovodný program složený z odborných konferencí, seminářů a workshopů na aktuální technická, obchodní a ekonomická témata. Veletrh probíhá na Výstavišti Brno od 8.10. do 11.10.2024. https://www.bvv.cz/msv
Odkazy:
- Webové stránky společnosti RoboDK Global: https://robodk.com
- RoboDK - postup offline programování: https://robodk.com/simulation
- Návod, jak zprovoznit RoboDK na Raspberry Pi OS: https://robodk.com/blog/robodk-for-raspberry-pi/



