Průmyslová automatizace potřebuje standardní, spolehlivé, efektivní a modulární řešení. Tyto vlastnosti splňuje komunikační standard IO-Link. IO-Link je obousměrné, point-to-point, single-drop digitální komunikační rozhraní, které se řídí standardy IEC 61131-2, IEC 61131-9 (SDCI) a IO-Link 1.1.3.
V článku najdeme přehled o provozu na IO-Link a o tom, jak zjednodušuje převod průmyslové výroby do Smart Factory. Představíme si příklady zařízení IO-Link od Analog Devices, včetně podřízeného zařízení, které lze použít k nahrazení pneumatických pohonů. Nebudou chybět ani referenční návrhy pro rychlou realizaci průmyslových pohonů s podporou IO-Link.
Přechod na Smart Factory
Díky jednoduché instalaci a schopnosti obousměrné komunikace je IO-Link rozšířen v celé řadě průmyslových aplikacích. Změnu nastavení konfiguračních parametrů lze jednoduše a rychle provést vzdáleně přes IO-Link. Inteligentní diagnostika a detekce chyb jsou další funkce, které lze provést přes IO-Link. Architektura systému IO-Link se skládá z point to point spojení mezi IO-Link masterem a různými zařízeními IO-Link. Použití standardních konektorů M8 nebo M12 a až 20 m dlouhého 3 nebo 4 žilového kabelu zjednodušuje instalaci systému. Master IO-Link obvykle má 4 nebo 8 portů, z nichž každý je připojen k zařízení IO-Link. Každý port může pracovat v režimu standardního vstupu/výstupu (SIO) nebo v režimu obousměrné komunikace.
IO-Link sice není provozní sběrnice (field bus), ale sběrnice typu point-to-point. Nicméně je kompatibilní pro použití s průmyslovým Ethernetem a lze ho tedy připojit k programovatelným logickým automatům (PLC) nebo HMI zařízením ( Obrázek 1).
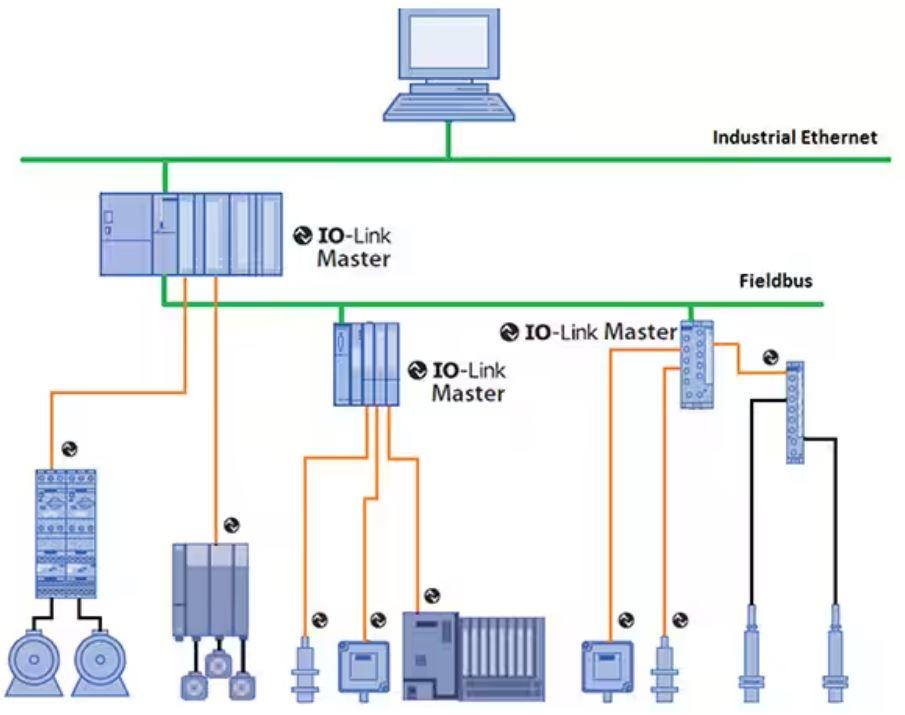
Obrázek 1: IO-Link je kompatibilní s provozními sběrnicemi a sítěmi průmyslového Ethernetu IEEE. (Zdroj obrázku: IO-Link Community)
Kromě provozu v režimu SDCI poskytuje IO-Link zpětnou kompatibilitu se standardem IEC 60974-5-2 pro binární senzory. Základní komunikace typu point-to-point využívá 3 pinové rozhraní (L+, C/Q a L-). V režimu IO-Link je komunikace mezi master a slave zařízeními obousměrná se třemi možnými přenosovými rychlostmi. COM1 je 4,8 kbps, COM2 je 38,4 kbps a COM3 je 230,4 kbps (obrázek 2). IO-Link master musí podporovat všechny tři přenosové rychlosti, aby mohl komunikovat s jakýmkoli připojeným slave zařízením. Slave zařízení podporují pouze jednu rychlost přenosu dat. Komunikace probíhá pomocí 24 voltových impulsů pomocí kódování nonreturn-to-zero (NRZ) na lince C/Q. V režimu IO-Link může být pin 2 nastaven jako digitální vstup (DI), digitální výstup (DO) nebo nemusí být připojen vubec. Zařízení IO-Link (snímač nebo akční člen) musí fungovat do 300 ms poté, co L+ překročí prahovou hodnotu 18 V.
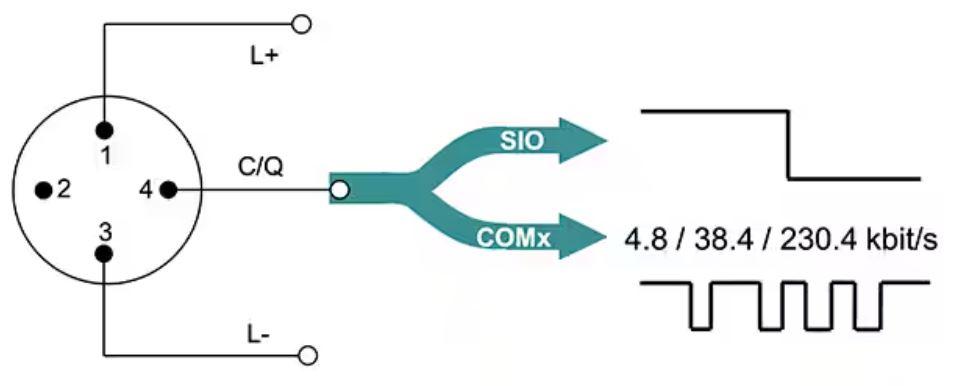
Obrázek 2: Komunikace IO-Link je obousměrná a může podporovat 4,8kbps; 38,4kbps a 230,4 kbps. (Zdroj obrázku: IO-Link Community)
Popis IO-Link zařízení (slave)
Všechny snímače a akční členy IO-Link mají tzv. popis zařízení IO-Link (IODD - IO-Link device description) (obrázek 3). IODD je xml soubor, který poskytuje IO-Link masteru data, která potřebuje k identifikaci a konfiguraci zařízení a interpretaci jeho dat. Struktura IODD je popsána odděleně ve standardu IEC 61131-9. Centralizovaná databáze souborů IODD je udržována konsorciem IO-Link a každý výrobce ho poskytuje na svých stránkách ke konkrétnímu produktu.
IODD obsahuje:
- Vlastnosti potřebné pro podporu komunikace
- Parametry zařízení
- Identifikační údaje
- Procesní a diagnostické informace
- Obrázek zařízení a logo výrobce
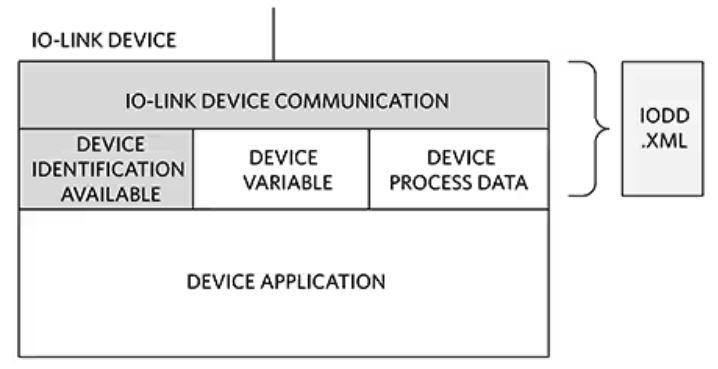
Obrázek 3: IODD je xml soubor, který obsahuje informace potřebné pro IO-Link master k identifikaci, konfiguraci a komunikaci se slave zařízením. (Zdroj obrázku: Analog Devices)
Datový spoj a datové typy
Výměna zpráv mezi IO-Link masterem a slave zařízeními jsou řízeny linkovou vrstvou (DL – Data Link Layer ). Zprávy jsou dlouhé 1 až 66 UART slov a nazývají se „M sekvence“. Zprávy mohou být různého typu. Například data, které jsou na vyžádání, příkazy pro správu systému nebo běžná procesní data. Master obsahuje DL handler, který se stará o chyby a chybová hlášení a spravuje provozní režimy (wake-up, SIO nebo COM). Pokud master odešle požadavek, slave zařízení mu musí odpovědět. Komunikace IO-Link může být synchronní nebo asynchronní.
Master a slave zařízení IO-Link zahrnují obslužné jednotky procesních dat pro synchronní komunikaci a obsluhu pro asynchronní komunikaci dat událostí, řízení, parametrů a servisních ISDU dat (index service data unit). Asynchronní data jsou na vyžádání a obsahují následující informace:
- Informace o konfiguraci nebo údržbě a ovládání
- Událost spuštěná se třemi úrovněmi naléhavosti: Chyba, Varování, Oznámení
- Data stránky pro přímé čtení parametrů zařízení
- Servisní data pro rozsáhlé datové struktury
Integrace komunikace IO-Link do masteru i do slave zařízení nemusí být jednoduchá záležitost. Je nutné plně implementovat příslušné standardy, aby byla zajištěna interoperabilita mezi zařízeními, a tím i spolehlivý provoz celého systému. Pro rychlou integraci komunikace IO-Link do aktuátorů smart-factory lze využít předem navržená řešení. Integrovaný transceiver IO-Link má velmi nízkou spotřebu a disponuje aktivní ochranou proti přepólování. Navíc jsou k dispozici s integrovaným DC/DC převodníkem i bez něj. Součástí řadiče je také SPI rozhraní pro rozsáhlou diagnostiku. Dvoukanálové transceivery IO-Link obsahují UART rozhraní a a funkci FIFO. Díky tomu je usnadněn výběr příslušného mikrokontroleru.
Výměna pneumatických pohonů za servomotory s IO-Link
IO-Link nabízí jednoduchý způsob, jak nahradit pneumatické pohony servopohony se sofistikovaným digitálním ovládáním. K tomu lze využít referenční návrh servopohonu MAXREFDES37# (obrázek 4). Tento referenční design poskytuje 5 V napájení a umožňuje ovládat až čtyři servomotory. Deska obsahuje konektor M12-4 pro připojení k IO-Link masteru.
Konektory se třemi kolíky podporují rychlé připojení ke standardním 5V servomotorům, z nichž jeden je součástí základního referenčního provedení. Připojení k 5 voltovým digitálním vstupům, napájecímu uzemnění a všem čtyřem PWM kanálům se provádí pomocí svorkovnic poke-in-wire. Technologie Management Gruppe Technologie und Engineering (TMG TE) IO-Link je součástí dodávky. MAXREFDES37# a lze ji použít v kombinaci s MAXREFDES277 dvoukanálovým IO-Link masterem ve formátu Pmod, který obsahuje GUI pro snadné ovládání pomocí Windows PC.

Obrázek 4: MAXREFDES37# má konektor M12 (vlevo) pro připojení k IO-Link masteru a je dodáván se servomotorem (vpravo). (Zdroj obrázku: Analog Devices)
MAXREFDES37# obsahuje MAX14821ETG+T IO-Link transceiver a MAX17504ATP+T buck DC/DC měnič. Jsou podporovány všechny specifikované přenosové rychlosti IO-Link a ovladače C/Q a DO mohou pracovat s proudem až 100 mA. Dva interní lineární regulátory poskytují 3,3 až 5 V napětí VDC pro napájení senzorů a akčních členů. Součástí jsou také 24 V digitální vstupy a výstupy. Integrované ovladače DO a C/Q lze nezávisle konfigurovat jako push-pull, low-side (NPN) nebo high-side (PNP). Transceiver lze konfigurovat a monitorovat prostřednictvím SPI.
Synchronní step down DC/DC měnič MAX17504 pracuje se vstupním napětím v rozsahu 4,5 až 60 V DC. Rozsah výstupního napětí se pohybuje od 0,9 V do 90 % vstupního napětí a je schopen dodávat proud 3,5 A. Přesnost měniče je ±1,1 % a to v teplotním rozsahu od -40 do +125 °C. Účinnost se pohybuje nad 90 % a proud ve vypnutém stavu je pouhých 2,8 μA.
IO-Link transceiver s integrovaným DC/DC měničem
MAX22514 je IO-Link transceiver se dvěma lineárními napěťovými regulátory a integrovanou přepěťovou ochranou. To vše je umístěno v pouzdře WLP o velikosti 2,5 mm x 2,6 mm nebo TQFN o velikosti 4 mm x 5 mm. Vzhledem k velikosti pouzdra je tento transceiver vhodný i pro průmyslové aplikace IO-Link s velmi omezeným prostorem (obrázek 5). Například transceiver pod názvem MAX22514AWA+ je umístěn v pouzdře WLP. Integrované SPI rozhraní podporuje možnost konfigurace a diagnostiky a také podporuje datové rychlosti COM1, COM2 a COM3.
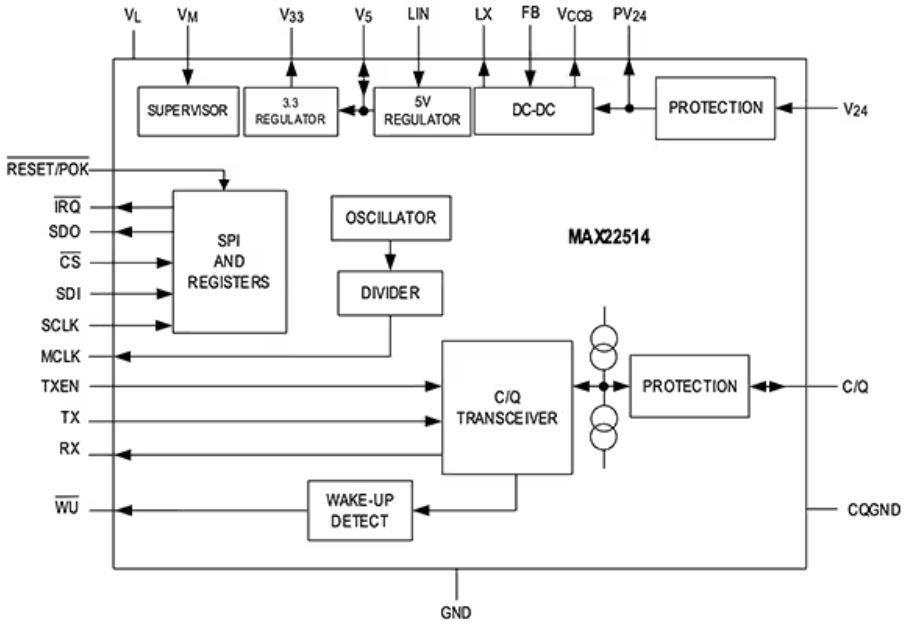
Obrázek 5: Transceiver MAX22514 je vhodný pro použití v masterech i slavech IO-Link. (Zdroj obrázku: Analog Devices)
Pro zkrácení doby vývoje lze využít referenční desku MAXREFDES278#. Jedná se o 8 kanálový solenoidový aktuátor založený na transceiveru MAX22514 IO-Link spolu s 8 kanálovým 1 A solenoidovým driverem MAX22200 s integrovanými FET tranzistory. Referenční deska obsahuje také integrovaný DC/DC buck napěťový měnič. Součástí dodávky je software s GUI pro operační systém Windows, díky čemuž lze vyhodnotit všechny funkce MAX22514. Pro připojení desky k počítači se používá kabel USB-A s konektorem micro-B.
Dvoukanálový IO-Link master
Pokud je nutné použít dvoukanálový IO-Link master lze využít transceiver MAX14819ATM+, který obsahuje dva digitální kanály. Integrovaný IO-Link framer eliminuje potřebu externích UART rozhraní a integrovaný časovač odlehčuje mikrokontroler od zpracování časově kritických úloh.
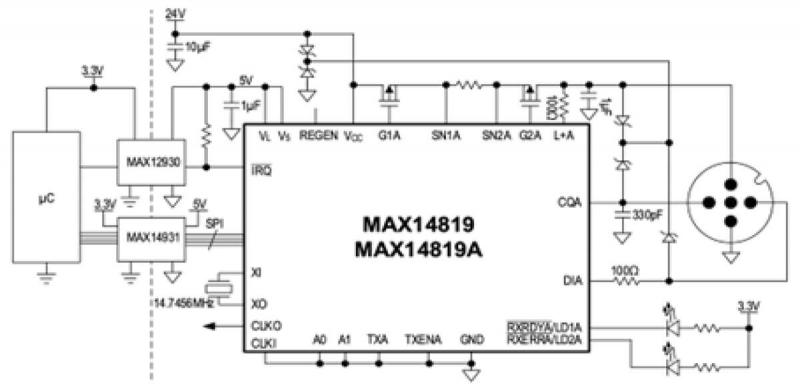
Tento transceiver lze použít v kombinaci s digitálními izolátory MAX14931FAWE+ a MAX12930EASA+T. MAX14931FAWE+ disponuje čtyřmi kanály pro přenos digitálních signálů v jednom směru. MAX12930EASA+T disponuje dvěma kanály pro přenos dat. Vývojová deska MAX14819EVKIT# je založena na transceiveru MAX14819A a obsahuje digitální izolátory MAX14931 a MAX12930 (obrázek 6).
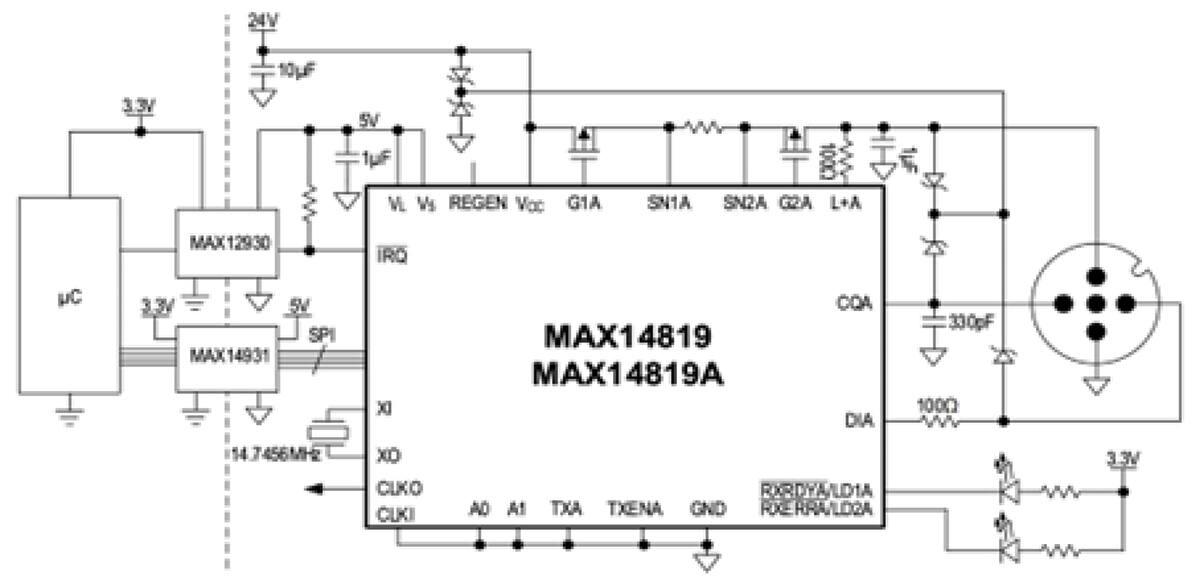
Obrázek 6: Vývojová sada MAX14819EVKIT# pro dvoukanálový IO-Link obsahuje transceiver MAX14819 a digitální izolátory MAX12930 a MAX14931. (Zdroj obrázku: Analog Devices)
Závěr
Aby bylo možné těžit z výhod Průmyslu 4.0 ,musí se senzory a převodníky implementovat rychle a efektivně. Za tímto účelem poskytuje IO-Link standardní, spolehlivý, efektivní a modulární přístup. IO-Link přináší inteligentní řešení pro monitorování a rekonfiguraci senzorů a akčních členů.
Článek vyšel v originále na webu DigiKey.com



