 Pod
pojmem elektromotor se asi každému nejdříve vybaví klasický rotační pohon s
pevným statorem a otáčejícím se rotorem. Pokud se dodá lineární elektromotor,
tak ty v oboru zasvěcení si patrně představí pojezd a na něm pohybující se „vozík“
/ jezdec. V mnoha případech, zvláště v případě stále vyspělejších robotů a automatů
potřebujeme realizovat lineární pohyb ve vertikálním nebo horizontálním směru,
který je realizován vysouváním a zasouváním tyče podobně jako u pneumatických
válců (např. pro zvedání ramen, vystrkování předmětů z dopravního pásu, svislé
pokládání / zvedení předmětů apod.). Právě k těmto účelům nebo jako přímá náhrada
pneumatických válců výborně poslouží válcové lineární pohony, které obvykle
mají velmi kompaktní rozměry a přitom dobrou rychlost vysouvání a zatížitelnost.
Ano, v případě malých rychlostí lze toto povést ozubeným převodem rotačního
pohybu běžného elektromotoru na lineární, ale toto provedení je náročné na uspořádání,
provedení není zrovna kompaktní, je u něj náročnější údržba a rychlost pohybu
omezena.
Pod
pojmem elektromotor se asi každému nejdříve vybaví klasický rotační pohon s
pevným statorem a otáčejícím se rotorem. Pokud se dodá lineární elektromotor,
tak ty v oboru zasvěcení si patrně představí pojezd a na něm pohybující se „vozík“
/ jezdec. V mnoha případech, zvláště v případě stále vyspělejších robotů a automatů
potřebujeme realizovat lineární pohyb ve vertikálním nebo horizontálním směru,
který je realizován vysouváním a zasouváním tyče podobně jako u pneumatických
válců (např. pro zvedání ramen, vystrkování předmětů z dopravního pásu, svislé
pokládání / zvedení předmětů apod.). Právě k těmto účelům nebo jako přímá náhrada
pneumatických válců výborně poslouží válcové lineární pohony, které obvykle
mají velmi kompaktní rozměry a přitom dobrou rychlost vysouvání a zatížitelnost.
Ano, v případě malých rychlostí lze toto povést ozubeným převodem rotačního
pohybu běžného elektromotoru na lineární, ale toto provedení je náročné na uspořádání,
provedení není zrovna kompaktní, je u něj náročnější údržba a rychlost pohybu
omezena.
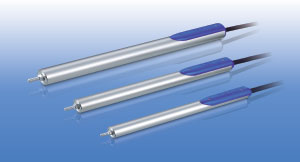
Válcové mikropohony RCL od společnosti IAI
![]() Jedním
z předních světových výrobců lineární elektromotorů / pohonů je americká společnost
IAI. Její nabídka je opravdu velmi rozsáhlá a najdeme zde i velmi malé válcové
pohony (mikropohony) s označeném RCL. Ty nejmenší mohou mít vnější průměr 16
mm a délku jen 200 mm, přičemž poskytují zdvih 25 mm. Samozřejmě jsou k dispozici
provedení i o malinko větší s průměry válců 20 až 25 mm, které poskytují zdvih
až 40 mm s přesností regulace na 0,1 mm. Zde se ke zjišťování polohy využívá
vestavěného inkrementálního snímače. Jsou tedy vhodné pro velmi jemné a přesné
stroje, roboty a mechanismy. I při těchto malých velikostech jsou tažnou / tlačnou
silou až 30 N tyto motory schopny ve vertikálním použití zvedat až 0,4 kg. U
horizontálního použití pak až 0,5 až 2 kg. To vše při rychlosti pohybu až 300
až 450 mm/s a zrychlení až 2 G v horizontálním nebo 1 G ve vertikálním použití.
Díky tomu je lze použít i místo solenoidů často používaných u různých elektricky
ovládaných rychlých ventilů.
Jedním
z předních světových výrobců lineární elektromotorů / pohonů je americká společnost
IAI. Její nabídka je opravdu velmi rozsáhlá a najdeme zde i velmi malé válcové
pohony (mikropohony) s označeném RCL. Ty nejmenší mohou mít vnější průměr 16
mm a délku jen 200 mm, přičemž poskytují zdvih 25 mm. Samozřejmě jsou k dispozici
provedení i o malinko větší s průměry válců 20 až 25 mm, které poskytují zdvih
až 40 mm s přesností regulace na 0,1 mm. Zde se ke zjišťování polohy využívá
vestavěného inkrementálního snímače. Jsou tedy vhodné pro velmi jemné a přesné
stroje, roboty a mechanismy. I při těchto malých velikostech jsou tažnou / tlačnou
silou až 30 N tyto motory schopny ve vertikálním použití zvedat až 0,4 kg. U
horizontálního použití pak až 0,5 až 2 kg. To vše při rychlosti pohybu až 300
až 450 mm/s a zrychlení až 2 G v horizontálním nebo 1 G ve vertikálním použití.
Díky tomu je lze použít i místo solenoidů často používaných u různých elektricky
ovládaných rychlých ventilů.
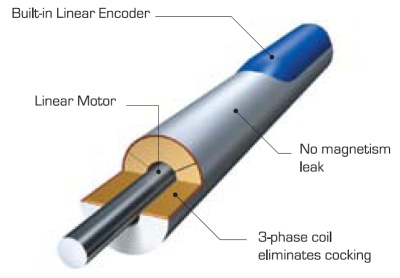
Z pohledu ovládání / napájení se motor řídí pulsním (obdélníkovým) 3fázovým 24 V napětím, které se přivádí na napájecí svorky U, V a W 3fázové budicí cívky (3-phase coil). K řízení se však využívá níže uvedených řídicích jednotek, které umožňují přesně a snadno řídit pozice vysunutí, rychlost pohybu a průběh zrychlení a brždění. Velkou výhodou uvedeného typu RCL je již vestavněný inkrementální enkodér, který slouží jako zpětná regulační vazba pro řídící jednotku.
Popis lineárního mikromotoru RCL a možnosti použití ve vertikální i horizontální pohyb / zvedání
Grafickému průběhu rychlosti v čase (vpravo) pak odpovídá následující průběh síly vyvinuté motorem v čase
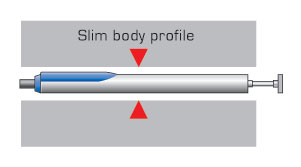
Základní vlastnosti:
- Rozměry: 16 x 200 mm; 20 x 236 mm; 25 x 300 mm
- Zdvih: 25 mm; 30 mm; 40 mm
- Rychlost pohybu: 300 mm/s; 340 mm/s; 450 mm/s
- Zrychlení: vertikální 1 G; horizontální 2 G
- Napájení: 24 VDC; 2 až 10 W pevným kabelem
- Max. zatížení: ve vertikální směru 0.1 až 0.4 kg; v horizontálním směru 0.5 až 2 kg
- Max. tlačná / tažná síla: 10 až 30 N

Rozměry všech 3 zástupců mikromotorů RCL
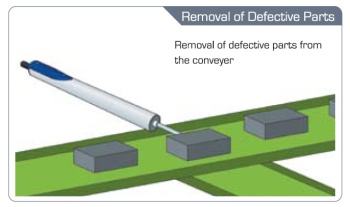
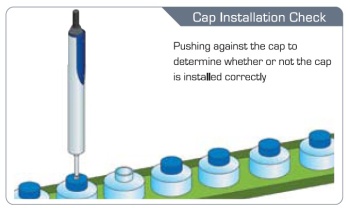
Některé možnosti použití lineárních motorů
Řízení mikropohonů RCL
 Jak
je známo, každý elektromotor musí mít svoje řízení a buzení, kterým je ovládán.
Pokud jej nechceme jen zapnout či vypnout, ale chceme i nějakou polohovou nebo
pohybovou regulaci, je nutné použít pro tyto účely řídící jednotky, nejlépe
speciálně navržené pro daný typ motoru. Stejně je tomu i u zde uvedeného mikropohonu
RLC, pro který jsou z mnoha různých IAI produktů určeny jednotky ACON a ASEL.
Zatímco ta první s názvem ACON slouží pro účely polohování (polohovací řídící
jednotka), ASEL je univerzální 2osá programovací řídící jednotka pro náročné
aplikace.
Jak
je známo, každý elektromotor musí mít svoje řízení a buzení, kterým je ovládán.
Pokud jej nechceme jen zapnout či vypnout, ale chceme i nějakou polohovou nebo
pohybovou regulaci, je nutné použít pro tyto účely řídící jednotky, nejlépe
speciálně navržené pro daný typ motoru. Stejně je tomu i u zde uvedeného mikropohonu
RLC, pro který jsou z mnoha různých IAI produktů určeny jednotky ACON a ASEL.
Zatímco ta první s názvem ACON slouží pro účely polohování (polohovací řídící
jednotka), ASEL je univerzální 2osá programovací řídící jednotka pro náročné
aplikace.
Polohovací řídicí jednotka ACON
Řídicí 1-osé polohovací jednotka řady ACON je nabízena v celkem 5 různých provedeních, poskytujících různou podporu ovládání:
- ACON-C a ACON-CG - standardní provedení pro běžné řízení pozice s až 512 pozicemi
- ACON-CY - provedení solenoid s 3 pozicemi pro přímou náhradu solenoidových ventilů
- ACON-PL / PO - provedení pro řízení vstupních sekvencí impulsů
- ACON-SE - provedení pro online síťové řízení polohy sériovou komunikací RS-485 (paměť na 64 pozic)
Provedení ACON-C lze pak považovat za základní řídící jednotku řady ACON-C. To poskytuje buď 64 nebo v rozšířeném provedení až 512 nastavitelných polohových pozic a jejich hraničních pohybových zón. Lze i nastavit parametry a křivku zrychlení a brždění pro minimalizaci rázů a vibrací a rychlost pohybu.
Programování se provádí prostřednictvím sériového rozhraní RS-485 z PC, PLC nebo jiného nadřazeného systému.
 Základní
parametry jednotky ACON-C
Základní
parametry jednotky ACON-C
- Počet řízených os: 1
- Napájecí napětí motoru: 24 VDC
- Budící proud motoru: 1.3 až 1.7 A
- Měření pozice: inkrimentální enkodér, max. 800 impulsů na otáčku
- Počet nastavitelných pozic:
- standardní provedení: 64
- rozšířené provedení: 512
- Řízení přechodu na pozice (např. z PLC):
- 16 vstupních řídících bin. signálů 24 V
- 16 výstupních zpětných info bin. Signálů 24 V
- nastavení funkce řízení do 1 z 5 režimů
- Záloha paměti při výpadku napájení
- Nastavené pozice uložené v sériové EEPROM
- LED indikace funkce
- Programovací / učící rozhraní: RS-485
- Rozhraní pro připojení enkodéru: RS-422A/423A
- Napájení: 24 VDC
- Rozměry: 35 x 178.5 x 68.1 mm
- Hmotnost: cca 300 g
- Krytí: IP20


Příklady připojení, zapojení a použití řídicí polohovací jednotky ACON-C
Programovací řídící jednotka ASEL
 Kontroléry
ASEL je univerzálnější řídicí jednotka pro 1- nebo 2-osou regulaci lineárních
motorů / pohonů AIA. Pro tyto účely poskytuje tzv. programový režim, ve kterém
pohon ovládá v jednotce uložený program, nebo v tzv. polohovacím režimu, ve
kterém se využívá uložených až 1 500 pozic, na které se přechází dle povelů
z nadřazeného PLC. Zjišťování aktuální pozice lze provádět z inkrementálního
sériového enkodéru, absolutního sériového enkodéru, ABZ paralelní enkodér. Ovládání
běhu programu či přechod na nastavené pozice lze provádět pomocí 24 binárních
vstupů a 8 výstupů v režimu NPN nebo PNP. Jednotka nabízí i další řídící vstupy
pro nouzové zastavení nebo brždění apod. Jednotka má rozměry 43 x 159 x 110
mm a hmotnost cca 450 g.
Kontroléry
ASEL je univerzálnější řídicí jednotka pro 1- nebo 2-osou regulaci lineárních
motorů / pohonů AIA. Pro tyto účely poskytuje tzv. programový režim, ve kterém
pohon ovládá v jednotce uložený program, nebo v tzv. polohovacím režimu, ve
kterém se využívá uložených až 1 500 pozic, na které se přechází dle povelů
z nadřazeného PLC. Zjišťování aktuální pozice lze provádět z inkrementálního
sériového enkodéru, absolutního sériového enkodéru, ABZ paralelní enkodér. Ovládání
běhu programu či přechod na nastavené pozice lze provádět pomocí 24 binárních
vstupů a 8 výstupů v režimu NPN nebo PNP. Jednotka nabízí i další řídící vstupy
pro nouzové zastavení nebo brždění apod. Jednotka má rozměry 43 x 159 x 110
mm a hmotnost cca 450 g.
V programovém režimu může mít program napsaný v programovacím jazyku Super SEL délku až 2000 kroků a v jednotce může být uloženo až 64 programů. V rámci multitaskingu lze paralelně provozovat až 8 programů. Programy jsou uloženy ve Flash EPROM paměti. V polohovacím režimu lze nastavit až 1 500 polohových pozic a k dispozici je dalších 5 podrežimů, které umožňují řízení přizpůsobit dané aplikaci na míru.

Fotografie a příklad připojení programovatelné řídicí jednotky ASEL
Závěr
Zde představený lineární motor je svými minirozměry ideální nástroj pro realizaci malých robotů a plně automatických mini zařízeních a systémů. Samozřejmě, že v nabídce společnosti IAI je i mnoho velkých verzí různě provedených s velkých zdvihem a větší silou pro velké stroje. Ty ale vyrábí po světě mnoho různých firem, a proto mě právě zaujala tyto nejmenší provedení. Více informací, datasheety, manuály i 2D a 3D modely pak najdete na stránkách výrobce www.intelligentactuator.com/products/micro_cylinder_rcl.php.
Antonín Vojáček
DOWNLOAD & Odkazy
- Domovská stránka výrobce, společnosti IAI America, Inc. - www.intelligentactuator.com
- Přímý odkaz na stránky o lineárních mikromotorech RCL - www.intelligentactuator.com/products/micro_cylinder_rcl.php.
- Další zajímavé články najdete na stránkách serveru automatizace.HW.cz



