 Pod
označením MEMS mikrofony se skrývají miniaturní křemíkové mikrofony vyráběné
v provedení jedné integrované součástky (CMOS čipu), která obsahuje jak snímací
na tlak citlivou křemíkovou membránu přímo upevněnou na křemíkový čip, tak i
integrovaný předzesilovač a případně další pomocné obvody, jako například různé
aktivní filtry pro odstranění nežádoucích složek zvuku (např. hluk). Pro snadné
připojení k dnešním již plně digitálním systémům již také dost často obsahuje
integrovaný A/D převodník a výstup z „mikrofonu“ již tedy jsou digitální sériově
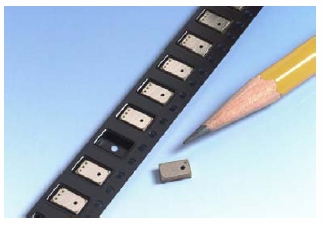
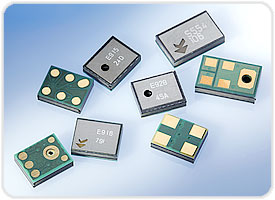
přenášená data. Celý mikrofon je tak jedna kompaktní součástka velikosti max.
několika mm. Ve většině případů je systém snímání tlaku ve formě měření změny
kapacity (podobně jako například snímání vibrací u MEMS akcelerometrů), tedy
prakticky jde o kapacitní mikrofon.
Pod
označením MEMS mikrofony se skrývají miniaturní křemíkové mikrofony vyráběné
v provedení jedné integrované součástky (CMOS čipu), která obsahuje jak snímací
na tlak citlivou křemíkovou membránu přímo upevněnou na křemíkový čip, tak i
integrovaný předzesilovač a případně další pomocné obvody, jako například různé
aktivní filtry pro odstranění nežádoucích složek zvuku (např. hluk). Pro snadné
připojení k dnešním již plně digitálním systémům již také dost často obsahuje
integrovaný A/D převodník a výstup z „mikrofonu“ již tedy jsou digitální sériově
přenášená data. Celý mikrofon je tak jedna kompaktní součástka velikosti max.
několika mm. Ve většině případů je systém snímání tlaku ve formě měření změny
kapacity (podobně jako například snímání vibrací u MEMS akcelerometrů), tedy
prakticky jde o kapacitní mikrofon.
Mezi aktuálně nejlepší výrobce MEMS mikrofonů patří následující společnosti:
- Wolfson Microelectronics (WM7xxx)
- Analog Device (ADMP40x)
- Akustica (AKU200x)
- Infineon (SMM310)
- Knowles Electronics (SiSonic SPx04xxxxx)
- Memstech (MSMx)
- AAC Acoustic Technologies (SM0401x)
- Omron - STMicroelectronics
Nejnověji k těmto výrobcům v minulém roce 2009 ještě přibyl STMicroelectronics, který však využívá technologii OMRONu.
Bližší popis MEMS mikrofonů
Trocha historie ...
 Od
doby kdy byl vynalezen první mikrofon (rok 1876) již uplynulo mnoho let a vývoj
postoupil velmi kupředu. Z pohledu MEMS mikrofonů je jedním z dalších mezníků
rok 1962, kdy byl vynalezen všem elektrotechnikům asi důvěrně známý elektretový
kondenzátorový mikrofon EMC (Electret-Condenser-Microphone), který v sobě kombinuje
vysokou citlivost, relativně dost vysoký frekvenční rozsah při nízkých výrobních
nákladech a tedy i nízké prodejní ceně. Taky se jich ročně vyrobí a prodá přes
1 bilion kusů a téměř 90% všech vyrobených mikrofonů jsou právě elektretové.
Dalším mezníkem je rok 1983, kdy byl vyroben první integrovaný MEMS technologií
vyrobený kapacitní mikrofon a to také mimo jiné přispělo k nebývalému rozkvětu
dnešních miniaturních mobilních telefonů a podobných komunikátorů.
Od
doby kdy byl vynalezen první mikrofon (rok 1876) již uplynulo mnoho let a vývoj
postoupil velmi kupředu. Z pohledu MEMS mikrofonů je jedním z dalších mezníků
rok 1962, kdy byl vynalezen všem elektrotechnikům asi důvěrně známý elektretový
kondenzátorový mikrofon EMC (Electret-Condenser-Microphone), který v sobě kombinuje
vysokou citlivost, relativně dost vysoký frekvenční rozsah při nízkých výrobních
nákladech a tedy i nízké prodejní ceně. Taky se jich ročně vyrobí a prodá přes
1 bilion kusů a téměř 90% všech vyrobených mikrofonů jsou právě elektretové.
Dalším mezníkem je rok 1983, kdy byl vyroben první integrovaný MEMS technologií
vyrobený kapacitní mikrofon a to také mimo jiné přispělo k nebývalému rozkvětu
dnešních miniaturních mobilních telefonů a podobných komunikátorů.
MEMS kapacitní mikrofony (MCM = Mems Capacitive Microphone), vyráběné jednosubstrátovou
technologií kombinující objemové a povrchové MEMS technologie, vylepšil mnoho
vlastností elektretových mikrofonů, navíc je výrazně menší, přizpůsobený vysokoteplotnímu
automatickému osazování desek plošných spojů a méně náchylný na mechanické poškození.
Hlavní jeho výhodou však je možnost monolitické integrace na společný křemíkový
CMOS čip s elektronickými analogovými i digitálními obvody. Díky tomu se dá
využít i obecně jako akustický senzor snímající i jiné frekvence než lidský
hlas a je vhodný například i pro systémy automatické detekce opotřebení strojů.
MEMS mikrofony samozřejmě mohou pracovat i na jiném principu než měření změny
kapacity, například se využívá piezoelektrických a piezorezistivních principů
či optické detekce, ale přesto cca 80 % veškeré produkce MEMS mikrofonů využívá
kapacitní princip (MCM), protože poskytují vysokou citlivost a zároveň levnou
„pásovou“ výrobu.
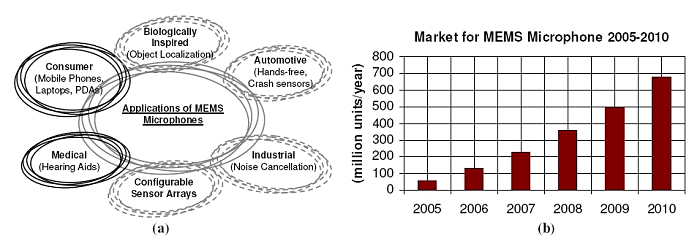
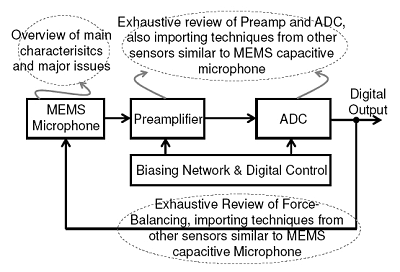
Možné oblasti použití (a) a graf ukazující každoročně se zvyšující výrobu MEMS mikrofonů (b)
Bloková struktura MEMS mikrofonu
Základním prvkem MCM je elektroakustický měnič realizovaný pro detekci vzduchem šířeného akustického tlaku. Primárně se skládá ze dvou elektrod, kde jedna je pevná umístěná na čipu a druhá pohyblivá umístěná na tenké malé křemíkové membráně. Její pohyb v důsledku měnícího se akustického tlaku mění mezeru mezi elektrodami a tedy i kapacitu vzduchového kondenzátoru. Ten se následně hned vedle na stejném čipu umístěnými obvody převádí na napětí, proud či frekvence, který je k dispozici pro další zpracování na výstupním rozhraní (RI).
Ze součástky tak může vycházet základní analogový signál, či může být dalšími obvody na čipu dále upraven (filtrován), zesílen či převeden na digitální signál. Následující obrázek přibližně ukazuje tento princip vyhodnocení změny kapacity v MCM:

Typická bloková struktura MEMS mikrofonu složená ze snímací části (senzor)
a převodníku (RI rozhraní).
Klidová pozice pružné membrány je nastavena připojeným napětím VB a převodník
nejčastěji převádí změny kapacity vyvolané zvukem na napěťový signál (a).
Ten dále může být například převeden A/D převodníkem
(ADC) na digitální datový tok (b).
Struktura snímací části – kapacitní senzor
Pevná membrána (PM) elektroakustického měniče je perforovaná a slouží jako pevná elektroda. Díky akustickým otvorů je tedy necitlivá k akustickému tlaku. Pohyblivá snímací membrána (MM) je připevněna ke křemíkovému substrátu pomocí křemíkových pružin, podobně jako snímací struktura MEMS akcelerometrů, a vibruje dle změn tlaku vzduchu. Navíc je zpevněna vertikálními žebry. Celá tato struktura je zapouzdřena v komoře.
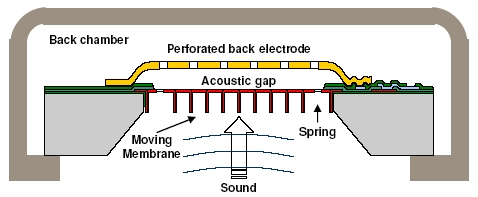
Jedno z možných provedení MEMS mikrofonu, konkrétně jeho snímací části v podobě kapacitního senzoru tvořeného pružnou a pevnou membránou (elektrodou).
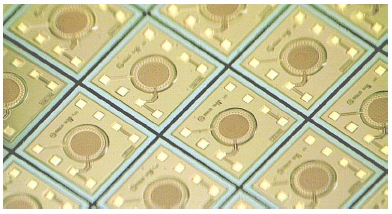
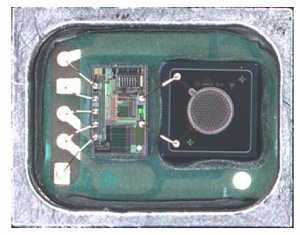
Fotografie reálné struktury MEMS mikrofonu.
Takto vytvořený kapacitní senzor je uměle vychylován napětím VB (viz obrázek). Tato polarizace ukládá v kapacitní struktuře určité množství vychylovacího náboje a nastavuje senzor na požadovanou snímací citlivost. Ta může být definována jako poměr mezi výstupním napětím či proudem a změnou kapacity v MEMS struktuře při akustickém tlaku.
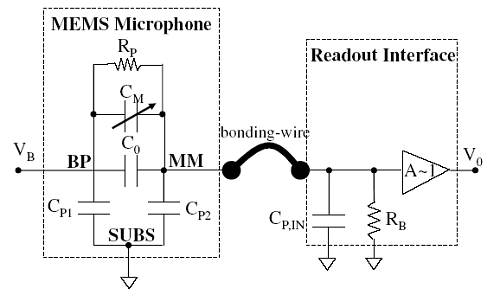
Náhradní schéma zapojení MEMS mikrofonu - snímací část (MEMS Microphone)
a vyhodnocovací část (Readout Interface)
Popis: VB = vychylovací napětí, C0
= jmenovitá kapacita mezi oběma elektrodami,
CM = proměnná
kapacita vlivem akustického tlaku zvuku, CP1 a CP2
= parazitní kapacita elektrod,
RP parazitní odpor mezi elektrodami.
 Polarizací
struktury vzniká uměle generovaná elektrostatická síla vychylující pohyblivou
membránu (Moving Membrane) z její klidové pozice XU do nové pozice X0, kde je
protivyvážena silou tuhosti pružin (Suspension Spring). To je nový pracovní
bod, ve kterém se membrána pohybuje díky působícímu akustickému tlaku a určuje
požadovanou citlivost.
Polarizací
struktury vzniká uměle generovaná elektrostatická síla vychylující pohyblivou
membránu (Moving Membrane) z její klidové pozice XU do nové pozice X0, kde je
protivyvážena silou tuhosti pružin (Suspension Spring). To je nový pracovní
bod, ve kterém se membrána pohybuje díky působícímu akustickému tlaku a určuje
požadovanou citlivost.
Následujícími obvody se pak zpracovává jen proměnná složka kapacity CM, zatímco pevná hodnota kapacity C0 v daném prac. bodě se eliminuje. Citlivost mikrofonu tak závisí na vychylovacím náboji uloženém v MCM a tedy ve výsledku na přiloženém napětí VB.
V závislosti na vzdálenosti elektrod a parazitních kapacitách může být vhodná co nejvyšší hodnota VB pro dosažení co největší snímací citlivosti. V praxi však nemůže být vyšší než tzv. pull-in hranice, kdy se pohyblivá membrána „přilepí“ na pevnou elektrodu (Fixed Backplate). Obvykle se VB volí 70 % hodnoty pull-in napětí.
 Typické
parametry kapacitního senzoru:
Typické
parametry kapacitního senzoru:
- Efektivní oblast MM membrány: 0,25 mm
- Velikost komory: 0,4 mm3
- Jmen. vzdálenost mezi elektrodami: 1,6 mikrometrů
- Pull-in napětí: 10V
- Citlivost (při 1 Pa / 1 kHz): 4.2 mVpp (-53 dBV/Pa)
- Parazitní kapacity:
- CP1: 3 pF
- CP2: 30 pF
- C0: 6 pF
Provedení vyhodnocovacích obvodů (RI rozhraní)
 V
MCM je velká důležitost kladená na provedení výše zmíněného RI rozhraní, které
prakticky určuje výsledné vlastnosti mikrofonu, a které zároveň musí zajistit
co nejlepší a nejpřesnější odměření velmi malinkých změn kapacity, aniž by bylo
měření znehodnoceno různými parazitními jevy a také provést linearizaci signálu,
protože optimální funkce mikromechanické struktury senzoru je mimo lineární
oblast. Elektrické zapojení také musí být co nejjednodušší, aby bylo levné a
snadno realizovatelné pro výrobu pomocí běžných CMOS výrobních postupů. A to
vše při co nejmenší spotřebě elektrické energie, protože ve většině případů
MCM pracují v bateriově napájených systémech a aplikacích.
V
MCM je velká důležitost kladená na provedení výše zmíněného RI rozhraní, které
prakticky určuje výsledné vlastnosti mikrofonu, a které zároveň musí zajistit
co nejlepší a nejpřesnější odměření velmi malinkých změn kapacity, aniž by bylo
měření znehodnoceno různými parazitními jevy a také provést linearizaci signálu,
protože optimální funkce mikromechanické struktury senzoru je mimo lineární
oblast. Elektrické zapojení také musí být co nejjednodušší, aby bylo levné a
snadno realizovatelné pro výrobu pomocí běžných CMOS výrobních postupů. A to
vše při co nejmenší spotřebě elektrické energie, protože ve většině případů
MCM pracují v bateriově napájených systémech a aplikacích.
Dnes je již nejběžnější následující složení výstupních obvodů (RI rozhraní):
- Nábojový zesilovač / převodník / napěťový předzesilovač (PAMP)
- Sigma-delta A/D převodník (SDM)
- Obvody kompenzace, filtrace a digitálního řízení
Tyto bloky pak převádí proměnou kapacitu na výstupní převzorkovaný datový tok. Někteří výrobci pak využívají i tzv. silovou zpětnou vazbu FFB (Force-FeedBack), která průběžně mění hodnotu výše uvedeného vychylovacího napětí VB a zvyšuje tak linearitu, stabilitu a eliminuje vlivy výrobních odchylek. Její používání je běžné i u MEMS akcelerometrů. Typické PAMP obvody jsou realizovány jako přímý převodník kapacity na napětí s přepínaným ofsetem a obvody pro odstranění šumu. Také často obsahují napěťově řízený zesilovač, řízení ofsetu a filtrem typu horní propust. Výstupními obvody filtrace a kompenzace pak jednotlivý výrobci dolaďují požadovanou frekvenční charakteristiku tak, aby byla v co nejširším pásmu plochá.
Dosahované parametry
 U
MEMS kapacitních mikrofonů je dnes běžná plochá frekvenční charakteristika od
cca 100 Hz do 15 kHz, což zvláště pro oblast přenosu hlasu více než postačuje.
Z pohledu citlivosti se dnes běžně dosahuje hodnot – 25 až – 40 dBV a SNR více
než 60 dB. To vše při velikosti pouzdra cca 3 × 3 × 1 mm.
U
MEMS kapacitních mikrofonů je dnes běžná plochá frekvenční charakteristika od
cca 100 Hz do 15 kHz, což zvláště pro oblast přenosu hlasu více než postačuje.
Z pohledu citlivosti se dnes běžně dosahuje hodnot – 25 až – 40 dBV a SNR více
než 60 dB. To vše při velikosti pouzdra cca 3 × 3 × 1 mm.
Mezi špičkové MCM dnes například patří výrobky společnosti OMRON, která v pouzdru velikosti jen 1.3 x 1.4 x 0.5 mm integruje mikrofon s citlivostí -26 dB a frekvenčním rozsahem 20 Hz až 20 kHz při napájení 10 až 15 V. Protože je mikrofon primárně určen pro přenosná zařízení, je výrobcem deklarován provozní rozsah teploty -40°C až +100°C.
Závěr
Bez MEMS mikrofonů by se dnes neobešla většina současných mobilních telefonů,
diktafonů, kamer a fotoaparátů či handsfree sad a podobných multimediálních
zařízení, kde každý milimetr místa je často skoro ceněný zlatem. Také výroba
těchto součástek rok od roku neustále stoupá a i počet výrobců každým měsícem
narůstá.
Článek vytvořil: Antonín Vojáček
DOWNLOAD & Odkazy
- Syed Arsalan Jawed: "CMOS READOUT INTERFACES FOR MEMS CAPACITIVE MICROPHONES", DIT - University of Trento, 2009
- Dan Giesecke: "MEMS Microphone", Knowles Acoustics (www.knowles.com), 2007
- Mark Sheplak, John M. Seiner, Kenneth S. Breuerz, Martin A. Schmidt: "A
MEMS Microphone for Aeroacoustics Measurements", American Institute
of Aeronautics and Astronautics Inc., 1999 - Výrobci MEMS mikrofonů: www.wolfsonmicro.com, www.analog.com, www.akustica.com, www.infineon.com, www.knowles.com, www.memstech.com, www.aacacoustic.com, www.st.com
- Další zajímavé články o senzorech najdete na stránkách serveru automatizace.HW.cz



