 Nedávno
jste si mohli přečíst článek „“ o magnetických lineárních snímačích pro měření
posunu či lineárního pohybu. To však není jediný konstrukční princip běžně využívaný
u bezkontaktních snímačů polohy / pohybu. Většina velkých výrobců snímačů (na
českém trhu např. Turck/Kuebler, Balluff, ASM a další) produkuje i tzv. magnetostrikční
lineární snímače pro bezkontaktní měření absolutní polohy. Ty sice také pracují
s magnetickým polem, ale na jiném, o něco složitějším principu magnetostrikce,
který vychází ze dvou dalších magnetomechanických jevů, magnetostrikčního Wiedemannova
a magnetoelastického (Villariho jev). Konkrétně při své funkci využívají Wiedemannův
a Villariho fyzikální jev.
Nedávno
jste si mohli přečíst článek „“ o magnetických lineárních snímačích pro měření
posunu či lineárního pohybu. To však není jediný konstrukční princip běžně využívaný
u bezkontaktních snímačů polohy / pohybu. Většina velkých výrobců snímačů (na
českém trhu např. Turck/Kuebler, Balluff, ASM a další) produkuje i tzv. magnetostrikční
lineární snímače pro bezkontaktní měření absolutní polohy. Ty sice také pracují
s magnetickým polem, ale na jiném, o něco složitějším principu magnetostrikce,
který vychází ze dvou dalších magnetomechanických jevů, magnetostrikčního Wiedemannova
a magnetoelastického (Villariho jev). Konkrétně při své funkci využívají Wiedemannův
a Villariho fyzikální jev.
To poskytuje těmto typům senzorů důležité systémové výhody, obzvláště pro použití při detekci úrovně hladiny a nebo jiného bezkontaktní absolutní měření polohy. Je velmi robustní a tím použitelný v aplikacích, kde ostatní metody nevyhoví. Měřicí rozsah může být u všech senzorů nastaven, takže výstupní signál je generován jen pro potřebný rozsah. Na přání zákazníka lze upravit celkovou délku, která bude vyhovovat aplikaci. Kompletní elektronika je obsažena v těle senzoru, umožňuje tak jednoduchou instalaci a senzory jsou prakticky bezúdržbové. V nabídce výrobců lze najít tyto snímače pro měření posuv v řádu milimetrů i mnoha metrů s přesností dnes již i od 1 mikrometru. Elektrický výstup se pak u různých výrobců různí, ale běžný je analogový i pulsní výstup, digitální sériový přenos hodnoty a u velkých výrobců (např. Balluff) i průmyslová komunikace CANopen, Profibus, DeviceNet atd.
 Technické
výhody:
Technické
výhody:
- absolutní měřící systém
- měřící rozsahy cca od 25 mm až do cca 7 metrů (někdy i více)
- rozlišovací schopnost: ± 0,1 % délky měřicí stupnice (některé snímače dnes již od 0,001 mm - např. Balluff)
- linearita až 0,01 %
- žádné opotřebení a údržba
- necitlivý na znečištění, prach a vlhkost
- krytí až IP68 (běžně IP67)
- vysoká odolnost proti vibracím
- jednoduchá montáž
- bez přívodu energie k pohyblivému magnetu
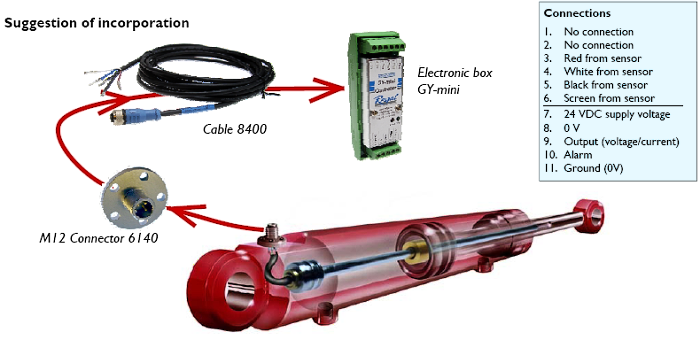
Příklad použití magnetostrikčního lineárního snímače pro měření posuvu
tlumiče
(ukázka ze katalogu švédské společnosti REGAL).
Obvyklá konstrukce magnetostrikčních lineárních snímačů
U většiny výrobců tohoto typů snímačů se lze setkat s následujícími dvěma typy provedení:
- Tyčové provedení pro instalaci do hydraulických válců (měřená délka
obvykle od 50 mm až do délek přes 10 m). Existuje pevné neohebné provedení
s pouzdrem z nerezové oceli i pružná ohebná tyčové varianta s plastovým pouzdrem
(PVDF provedení např. snímačů společnosti Turck).
- Profilové provedení s volným magnetem pro připojení pohybujících
se částí vně válců (měřená délka od cca 50 mm do cca 7 m). Princip snímačů
však obvykle umožňuje kaskádově složená odměřování a tím dovolují získat prakticky
jakoukoliv měřenou délku.
- Profilové provedení s vedeným magnetem připojeným na pohyblivý člen vodící tyčkou (měřená délka od 50 mm do cca 7 m). Úhel vyosení vodící tyčky ±18° dovoluje snadno získat lineární polohovou informaci dokonce i tam, kde se část stroje pohybuje nelineárně.
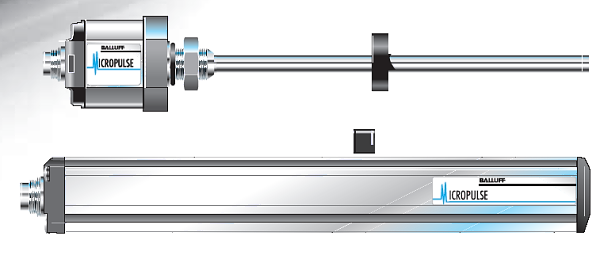
Základní dva typy magnetostrikčních lineárních snímačů polohy - odshora: tyčový , profilový (nabídka společnosti Balluff)
Zatímco pevné nerezové tyčové je ideální pro použití v agresivních mediích nebo v potravinářském průmyslu , plastové pružné provedení všude tam, kde je nutné mít dráhu zahnutou. U profilového provedení je pak vlnovod chráněn robustním hliníkovým pouzdrem.
 Z
pohledu konstrukce se každý snímač skládá z následujících částí:
Z
pohledu konstrukce se každý snímač skládá z následujících částí:
- Vlnovod (magnetostrikční slitina Ni-Fe)
- Ochranné tyčové nebo profilové pouzdro na vlnovod
- Montážní příruby
- Snímací permanentní magnet
- Generátor měřících pulsů + jejich vodič uvnitř vlnovodu
- Senzor / detektor torze (vzniklé mechanické vlny na vlnovodu)
- Vyhodnocovací SMD elektronika robustním taženém hliníkovém pouzdře
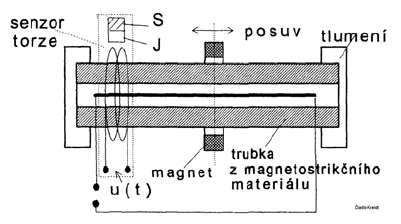
Průřez základní obecnou konstrukcí magnetostrikčních lineárních snímačů (vlevo) a průřez tyčového snímače POSICHRON společnosti ASM GmbH (vpravo).
Měřící element ("vlnovod") je obvykle vyroben ze speciální slitiny niklu a oceli s vnějším průměrem cca 1 mm a vnitřním průměrem cca 0,5 mm. Uvnitř je po celé délce této trubičky vedený měděný vodič sloužící k vedení elektrického pulsu spouštějící magnetostrikci (viz popis funkce níže). Na jednom konci vlnovodu bývá tlumící prvek, zatímco na druhém konci pak snímací a vyhodnocovací elektronika celého snímače. I když v některých případech se místo tlumícího prvku využívá naopak odrazový prvek a odraz vlny ke zpřesnění měření. Permanentní magnet je pak navlečen na vlnovodu a vytváří pohyblivý pro snímání pohybu / polohy.

Příklad tyčového magnetostrikčního lineárního snímače absolutní polohy švédské společnosti REGAL.
Princip funkce magnetostrikčních lineárních snímačů
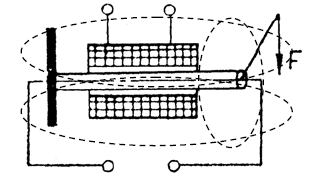
Běžně se využívá u magnetostrikčních lineárních snímačů absolutní polohy principu funkce založeného na měření doby šíření mechanické vlny (metoda „Time-of-Flight“) vzniklé elastickou deformací vlnovodu způsobenou magnetostrikčním jevem. Ten vychází ze dvou dalších magnetomechanických jevů, magnetostrikčního Wiedemannova a magnetoelastického (Villariho jev). Wiedemannův jev spočívá v tom, že prochází-li dlouhou a tenkou tyčí z feromagnetického materiálu umístěnou v podélném magnetickém poli proud, namáhá se tyč krutem. Za Villariho jev popisuje změnu magnetických vlastností, např. permeability, materiálu feromagnetické tyče, která je vyvolána její deformací v podélném směru.
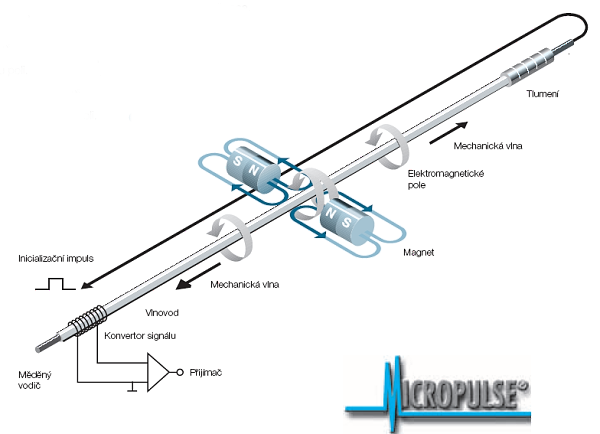
Struktura a funkce magnetostrikčních snímačů Micropulse společnosti Balluff.
Konkrétně ve snímači probíhá zhruba následující děj:
 Start měření je inicializován krátkým proudovým impulsem vypuštěným do vodiče
uvnitř vlnovodu, který vytváří kruhové magnetické pole otáčející se okolo
vlnovodu.
Start měření je inicializován krátkým proudovým impulsem vypuštěným do vodiče
uvnitř vlnovodu, který vytváří kruhové magnetické pole otáčející se okolo
vlnovodu.
- Magnetické siločáry snímacího permanentního magnetu umístěného v bodě měření
jsou kolmé k uvedenému vzniklému elektromagnetickému poli. V místě vlnovodu,
kde se obě pole protnou, se vytvoří vlivem magnetostrikčního jevu elastická
deformace v rozsahu mikrometrů, která se šíří vlnovodem oběma směry ve formě
mechanické vlny. Rychlost šíření této vlny na vlnovodu je cca 3000 m/s a je
prakticky nezávislá na vlivech okolního prostředí (např. teplota, rázy, vibrace,
znečištění).
- První část vlny, která dosáhne ke vzdálenému konci vlnovodu, je obvykle
zatlumena na konci vlnovodu v tlumícím prvku, i když u některých výrobců se
vlna namísto zatlumení naopak na konci odráží také ke snímací části a využívá
se ke zpřesnění měření. Druhá část vlny pak přímo směřuje a přijde ke snímacímu
konci snímače a je detekována senzorem torze (mechanické vlny). To je prakticky
signálový konvertor, který mění mechanickou vlnu na elektrický signál obráceným
magnetostrikčním jevem (magnetoelastického Villariho jevu).
- Doba přeběhu vlny od místa vzniku (místa umístění permanentního magnetu) k signálovému konvertoru je přímo úměrná vzdálenosti permanentního magnetu a signálového konvertoru. V praxi se však měří časová prodleva mezi počátky torzního a proudového impulsu, protože rychlost šíření mechanické vlny je rovna rychlosti zvuku, zatímco proudový puls (elmag. pole) se šíří rychlostí světla, který lze zanedbat. Naměřený čas pak dovoluje určit vzdálenost s extrémně vysokou přesností a elektronický převodník jej mění naměřený čas na odpovídající výstupní signál. Některé magnetostrikční snímače Balluff pak například dosahují rozlišení až 1 mikrometr bez průměrování nebo recirkulace.
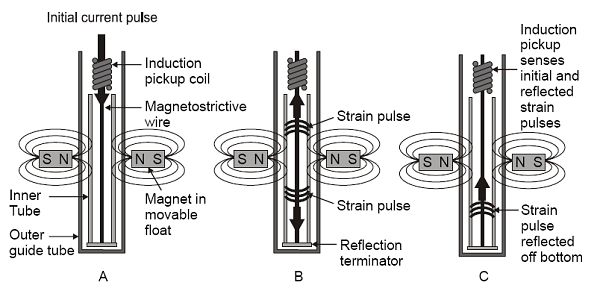
Posloupnost funkce magnetostrikčních lineárních snímačů, kde se pro měření využívá přímé i odražené vlny - odleva: vyslání budoucího elektrického pulsu (A), magnetostrikce s mag. polem permanentního magnetu vytváří mechanickou vlnu (B), detekce odražené vlny pro zpřesnění výpočtu vzdálenosti.
Závěrem…
Výše uvedený princip je v praxi u všech výrobců téměř stejný, přičemž někteří jej dále vylepšují dokonalejším zpracováním a vyhodnocením v elektronické části snímače. Například snímače společnosti Balluff s označením BTL5 obsahují "Autotuning" elektroniku s automatickým nastavením, která automaticky kompenzuje rozdíly v síle magnetického pole snímacího prvku - magnetu tak, že je vždy dosaženo shodných výsledků. To například zvýšilo možnou vzdálenost magnetu od vlnovodu a tyčové provedení odměřování může být namontováno i do válců s magnetickými kroužky jiných výrobců…
Článek vytvořil z podkladů výrobců: Antonín Vojáček
DOWNLOAD & Odkazy
- Stránky společnosti REGAL - www.regal.se
- Stránky společnosti ASM GmbH - www.asm-sensor.com, český prodejce REM-Technik - www.rem-technik.cz
- Stránky českého zastoupení společnosti Ballufff - www.Ballufff.cz
- Stránky českého zastoupení společnosti Turck/Kuebler - www.turck.cz
- Další články a testy o snímačích, PLC, komponentech nejen pro průmyslové aplikace najdete na stránkách serveru automatizace.HW.cz



