 V nabídce společnosti LinMot, výrobce různých přesných pohonů, je možné najít i jedno velmi netypické provedení, které jen tak jinde neuvidíte. Je jím řada "Lineární rotačních motorů LinMot PR01", které současně poskytují lineární posuvný pohyb jako lineární motor a rotační pohyb jako klasický rotační servo pohon. To vše v jednom kompaktním pouzdru! Oba pohyby je možné ovládat zcela nezávisle nebo synchronizovaně pro snadnější realizaci koordinovaných robotických funkcí.
V nabídce společnosti LinMot, výrobce různých přesných pohonů, je možné najít i jedno velmi netypické provedení, které jen tak jinde neuvidíte. Je jím řada "Lineární rotačních motorů LinMot PR01", které současně poskytují lineární posuvný pohyb jako lineární motor a rotační pohyb jako klasický rotační servo pohon. To vše v jednom kompaktním pouzdru! Oba pohyby je možné ovládat zcela nezávisle nebo synchronizovaně pro snadnější realizaci koordinovaných robotických funkcí.
Konkrétně tedy lze například nejdříve provádět lineární výsuvný / zásuvný pohyb hřídele motoru bez otáčení, nebo provádět otáčení hřídelí motoru bez lineárního pohybu a nebo provádět oba pohyby současně. A to buď zcela nezávisle, tedy zvlášť ovládám rychlost, zrychlení/zpomalení rotace a lineárního pohybu nebo lze nastavit synchronizační křivku, kde v závislosti na poloze vysunutí hřídele se měnit rychlost otáčení či obráceně dle změny rychlosti otáčení se bude automaticky regulovat i lineární posun.
Řízené probíhá prostřednictvím externí servo jednotky připojené k motoru přes dvojici šroubovacích konektorů (jeden pro řízení posunu a druhý pro řízení rotace).
Použití lineárních rotačních motorů
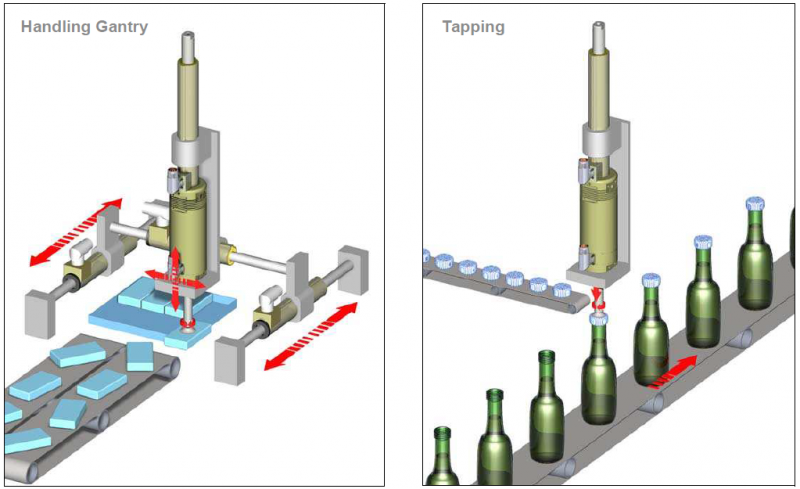
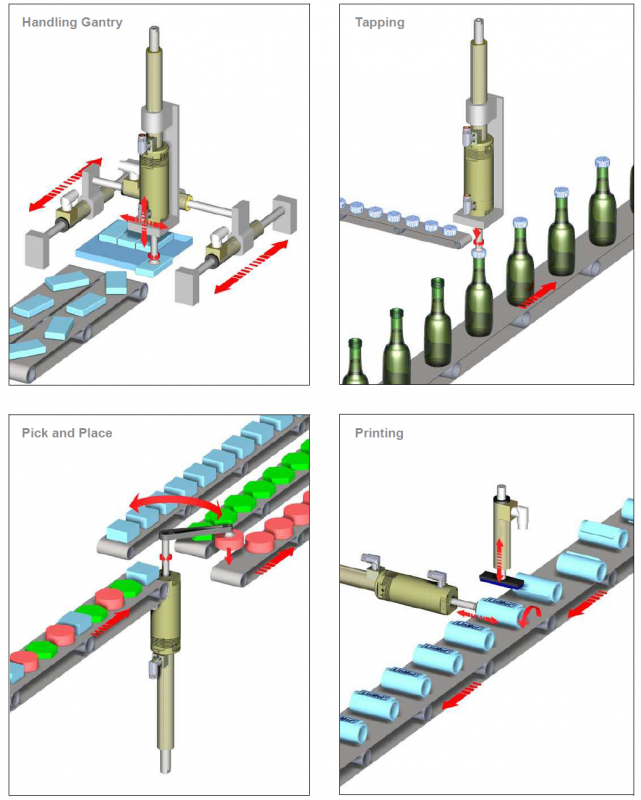 Běžně je nutné vždy v aplikacích zvolit buď lineární motor pro posuvný pohyb na malé vzdálenosti (např. pro přesouvání, centrování, zvedání nebo odtlačování předmětů) nebo rotační motory pro potřeby přesné natáčení předmětů (např. servo pohony natáčení předmětů) nebo trvalou rotaci pro potřeby pohonu nebo pro rotační pohyb válečků či bubnů různých válečkových, řetězových nebo pásových dopravníků. V aplikacích, kde je potřeba sladit oba pohyby pak je obvykle nutné vytvořit jejich kombinaci či případně kombinaci s pneumatickými písty. Nutné je to například u takových aplikací, jakými jsou:
Běžně je nutné vždy v aplikacích zvolit buď lineární motor pro posuvný pohyb na malé vzdálenosti (např. pro přesouvání, centrování, zvedání nebo odtlačování předmětů) nebo rotační motory pro potřeby přesné natáčení předmětů (např. servo pohony natáčení předmětů) nebo trvalou rotaci pro potřeby pohonu nebo pro rotační pohyb válečků či bubnů různých válečkových, řetězových nebo pásových dopravníků. V aplikacích, kde je potřeba sladit oba pohyby pak je obvykle nutné vytvořit jejich kombinaci či případně kombinaci s pneumatickými písty. Nutné je to například u takových aplikací, jakými jsou:
- Zavírací stroje pro nasazování a šroubování víček lahví.
- Automaty nasazování a šroubování šroubů / matic.
- Malé omotávací / ovinovací stroje.
- Různé automatické přenašeče a třídiče.
- Nástroje odebírání automatického vzorků produktů.
- Robotické uchopovací nástroje pro přesnou koncovou manipulaci.
- atd.
Motory LinMot PR01
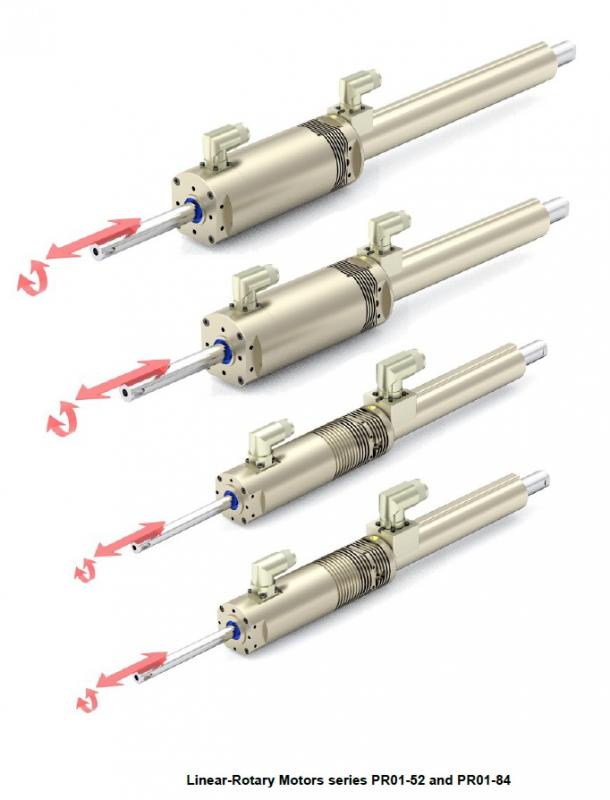 Lineární rotační motory LinMot PR01 se nabízejí s maximálním zdvihem 80 až 300 mm, max. rychlostí až 2,9 až 3,9 m/s a tlačnou silou 229 až 1024 N v lineárním pohybu a s max. otáčkami 100 až 1500 ot/min a max. točivým momentem 2 až 75 Nm. Samozřejmě tlačnou sílu i točivý moment lze regulovat, stejně jako zrychlení/doběh a maximální rychlost v lineárním i rotačním pohybu. V rámci motoru je integrovaná i elektronika a sensory odměřování polohy, takže motor lze přesně polohovat a zná aktuální pozici i po vypnutí / zapnutí napájení. V lineárním pohybu pak lze využívat polohovací přesnosti až +/- 0,05 mm a v rotačním pohybu přesnosti natočení +/- 0,1°. Provedení se nejmenším zdvihem pak logicky má praktickou výhodu v menších rozměrech, protože délka hřídele, která musí odpovídat požadovanému zdvihu svojí délkou nutně definuje i celkovou motoru.
Lineární rotační motory LinMot PR01 se nabízejí s maximálním zdvihem 80 až 300 mm, max. rychlostí až 2,9 až 3,9 m/s a tlačnou silou 229 až 1024 N v lineárním pohybu a s max. otáčkami 100 až 1500 ot/min a max. točivým momentem 2 až 75 Nm. Samozřejmě tlačnou sílu i točivý moment lze regulovat, stejně jako zrychlení/doběh a maximální rychlost v lineárním i rotačním pohybu. V rámci motoru je integrovaná i elektronika a sensory odměřování polohy, takže motor lze přesně polohovat a zná aktuální pozici i po vypnutí / zapnutí napájení. V lineárním pohybu pak lze využívat polohovací přesnosti až +/- 0,05 mm a v rotačním pohybu přesnosti natočení +/- 0,1°. Provedení se nejmenším zdvihem pak logicky má praktickou výhodu v menších rozměrech, protože délka hřídele, která musí odpovídat požadovanému zdvihu svojí délkou nutně definuje i celkovou motoru.

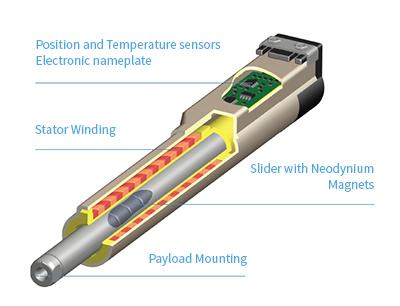 Možnost sloučit lineární a mechanický pohyb je možné díky konstrukci motoru, kde pohybující se hřídel (tzv. slider) není nijak mechanicky spojena s pevnou částí motoru. Hřídel je totiž tvořena trubkou z nerezové oceli, která má přesně v daných místech integrované neodymové magnety. Jejich magnetické pole reaguje na vytvářené elektromagnetické pole statoru tvořeného vynutím motoru okolo hřídele.
Možnost sloučit lineární a mechanický pohyb je možné díky konstrukci motoru, kde pohybující se hřídel (tzv. slider) není nijak mechanicky spojena s pevnou částí motoru. Hřídel je totiž tvořena trubkou z nerezové oceli, která má přesně v daných místech integrované neodymové magnety. Jejich magnetické pole reaguje na vytvářené elektromagnetické pole statoru tvořeného vynutím motoru okolo hřídele.
Mechanicky je hřídel uložena v ložiscích zajišťující osově vycetrovanou pozici vzhledem ke statoru, ale hřídel v nich není, narozdíl od běžných motorů pevně nalisována a uložena kluzně, aby bylo možné s ní pohybovat i v lineárně.
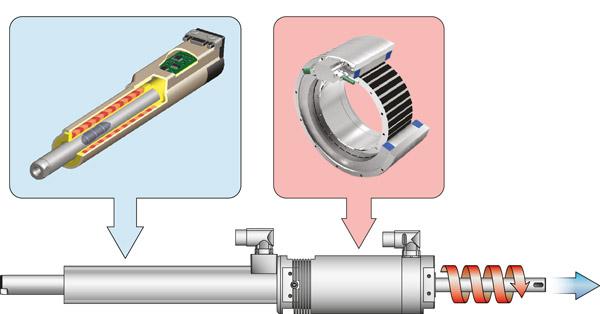
"Fajnšmekrovinou" je pak provedené s externí převodovkou. Ta umožňuje zvýšit točivý moment rotačního pohybu pro dynamické polohování i pro předměty s vysokým momentem setrvačnosti. Zatímco u standardních "jen" rotačních motorů může být pouzdro převodovky pevně spojeno s pouzdrem motoru, zde to logicky vzhledem k lineárnímu posunu není možné. Proto je převodovka upevněna až na konci hřídele a je společně s hřídelí také lineárně vysouvána. Vnější pouzdro převodovky je pak upevněno přes futra na vodící tyče.

Servo jednotky pro lineární rotační motory
I když lineární rotační motory LinMot PR01 mají přímo v motoru integrovanou i základní řídící elektroniku, využívá se pro napojení k řídicímu PLC externí řídící jednotky (servojednotky) "LinMot Servo Drives". Ty jsou nabízeny v široké nabídce provedení pro různé komunikační průmyslové sběrnice, takže prakticky neexistuje žádné moderní řídící PLC, které by nebylo možné na Lineární rotační motor LinMot napojit.
 K dispozici jsou následující komunikační sběrnice:
K dispozici jsou následující komunikační sběrnice:
- Profinet
- Profibus
- EtherCAT
- EtherNet/IP
- POWERLINK
- CANopen
- RS-485/RS-232
Konkrétně umožňují z PLC provádět jak nezávisle lineární výsuvný / zásuvný pohyb hřídele motoru bez otáčení, či provádět otáčení hřídelí motoru bez lineárního pohybu, tak provádět oba pohyby současně. A to buď zcela nezávisle, tedy zvlášť ovládám rychlost, zrychlení/zpomalení rotace a lineárního pohybu nebo lze nastavit synchronizační křivku, kde v závislosti na poloze vysunutí hřídele se měnit rychlost otáčení či obráceně dle změny rychlosti otáčení se bude automaticky regulovat i lineární posun.
Současně do PLC lze získávat aktuální data o pozici motoru z lineárního posuvu i natočení nebo aktuální rychlosti pohybu.

Video ukazující funkci lineárních rotačních motorů
Závěr
Lineární rotační motory LinMot řady PR01 představují velmi zajímavé kombinovaného provedení pohonu, který může najít velmi široké uplatnění, v budoucnu zejména v různých upevňovacích nástrojích na ramena robotů, které realizují finální jemné a přesné pohyby a manipulace.
Odkazy:
- Webové stránky výrobce LinMot: http://www.linmot.com
- Přímý odkaz na webové stránky LinMot o motorech řady PR01: http://www.linmot.com/products/linear-rotary-motors/
- Přímý odkaz na firemní e-shop s lineárními rotačními motory LinMot: http://shop.linmot.com/E/linear-rotary-motors.htm



