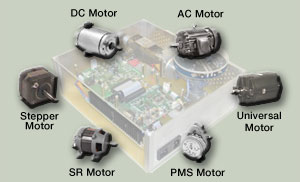
Jak lze řídit motor?
 S
množstvím různých typů a provedení motorů souvisí i velké množství různých možných
principů jejich řízení. V současné době digitálního zpracování signálů pomocí
různých MCU či DSP se nejčastěji nasazují algoritmy a systémy využívající pulsně-šířkovou
modulaci (PWM), kterou jsou ovládány výkonové budiče motoru tvořené tranzistory
MOSFET. V závislosti na druhu motoru a regulované veličině jsou pak do procesoru
zavedeny různé zpětnovazební vstupy (např. z měření proudu nebo rotačního enkodéru),
kterými je funkce regulačního algoritmu korigována a stabilizována.
S
množstvím různých typů a provedení motorů souvisí i velké množství různých možných
principů jejich řízení. V současné době digitálního zpracování signálů pomocí
různých MCU či DSP se nejčastěji nasazují algoritmy a systémy využívající pulsně-šířkovou
modulaci (PWM), kterou jsou ovládány výkonové budiče motoru tvořené tranzistory
MOSFET. V závislosti na druhu motoru a regulované veličině jsou pak do procesoru
zavedeny různé zpětnovazební vstupy (např. z měření proudu nebo rotačního enkodéru),
kterými je funkce regulačního algoritmu korigována a stabilizována.
V zásadě jsou v současnosti nejvyužívanější následující principy:
- Regulace proudu pomocí PWM s i bez zpětné vazby - pro stejnosměrné motory
- Fázové tyristorové řízení - jednoduché řízení pro střídavé jednofázové motory
- Frekvenční řízení - regulace s převodem napětí/frekvence, s PWM a s nebo bez zpětné vazby - pro střídavé asynchronní motory
- Senzorové i bezsenzorové vektorové a vícevektorové řízení s PWM - pro přesné řízení 3fázových motorů
- Řízení krokových motorů
Klasické fázové tyristorové řízení 1fáz. střídavého motoru (vlevo) a proudové řízení stejnosměrného bezkomutátorového motoru s enkodérem (vpravo)
Přesné vektorové řízení synchronního motoru s permanentními magnety (pro zvětšení klikněte na obrázky)
Realizace řízení obvody Freescale
 Pro
potřeby moderního elektronického digitálního řízení a regulace motorů musí být
každý systém vybaven dvěma základními prostředky:
Pro
potřeby moderního elektronického digitálního řízení a regulace motorů musí být
každý systém vybaven dvěma základními prostředky:
- Výpočetní digitální částí obvykle realizovanou procesorem obsahující časovač,
PWM modul, A/D převodník, SPI nebo LIN, příp. kvadraturní dekodér
- Analogovou výkonovou částí se spínacími výkonovými tranzistory, příp. tyristory, provádějící samotnou regulaci motoru spínáním napájecího proudu
V současné době lze z pohledu praktické realizace k tomuto požadavku přistoupit dvěma způsoby:
- Použít běžné univerzální MCU nebo DSP ve spojení s diskrétními výkonovými
obvody
- Použít k tomu určené a upravené speciální MCU a DSP, která již v jedné součástce obsahují digitální signálové i výkonové bloky a moduly vhodné pro přímou regulaci motorů
Obě tyto možnosti pak svou nabídkou integrovaných obvodů podporuje firma Freescale, kde v závislosti na složitosti regulace lze zvolit buď 8bitové MCU s jádrem 68HC08 pro jednoduché řízení stejnoměrných a jednofázových střídavých motorů, nebo 16bitové hybridní mikrokontroléry řady 56F8000 a 56F8300 pro složitější řízení stejnosměrných komutátorových i bezkomutátorových a 3fázových motorů, které svojí výbavou, výkonem 60 MIPS a až 560 kB Flash paměti stojí na rozhraní mezi klasickými MCU a DSP. Tím, že mohou obsahovat kvadraturní časovač či vícenásobné SPI či SCI rozhraní (QSPI, QSCI) a softwarové předpřipravené moduly (např. kvadraturního dekodéru, generátoru 3fázového sinusového průběhu, ramp funkce či algoritmy výpočtu rychlosti a vektorové modulace) lze jimi snadno realizovat i zpětnovazební regulaci rychlosti pohybu či nastavování pozice například s využitím rotačního enkodéru. Pro velmi náročné a složité systémy s vektorovým řízením synchronních motorů jsou tu pak opravdu výkonné 32bitové mikrokontroléry řady MPC5500 a MPF5300 postavené na technologii Power Architecture™.
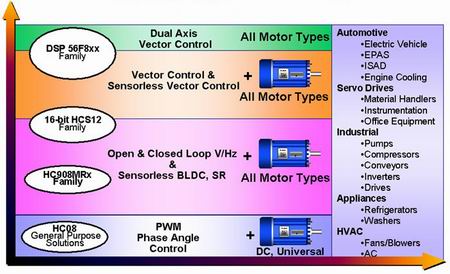
Přehled vhodných typů MCU a DSP pro řízení motorů z nabídky firmy Freescalu v závislosti na principu regulace
Tím však nabídka nekončí. Pokud má procesor hlavně sloužit jen pro potřeby
řízení motorů, bývá často výrobně i finančně jednodušší a výhodnější využít
speciálních verzí procesorů určených přímo pro aplikace regulace motorů. Pak
i "papírově" méně výkonný mikrokontrolér může splnit i náročnější
požadavky, jako je například přesné řízení systémů s proměnnou rychlostí a stejnosměrnými
či střídavými 3fázovými motory. Jejich typickými představiteli v nabídce Freescalu
jsou MCU řady M68HC908MR se 6kanálovým PWM modulem a speciální hybridní analogovo-digitální
obvody MM908E425 a MM908E62x s komunikací LIN a již integrovanými analogovými
výkonovými SMARMOS obvody realizující spínací můstky. Těmi lze již realizovat
systémy pro ovládání i třífázových motorů s chybově tolerantními vstupy, které
umístí obvody řízení budiče  motoru
okamžitě do bezpečného stavu v případě vzniku nějaké poruchy. Na MCU jádře HC08
pak byl vystavěn i speciální obvod MC3PHAC, umožňující i bez klasického programování
ovládat motory jak analogově pomocí potenciometrů, tak digitálně příkazy z připojeného
nadřazeného libovolného procesoru.
motoru
okamžitě do bezpečného stavu v případě vzniku nějaké poruchy. Na MCU jádře HC08
pak byl vystavěn i speciální obvod MC3PHAC, umožňující i bez klasického programování
ovládat motory jak analogově pomocí potenciometrů, tak digitálně příkazy z připojeného
nadřazeného libovolného procesoru.
Samozřejmostí jsou pak v nabídce Freescalu různé samostatné výkonové integrované obvody / budiče motorů realizující prostředníka mezi motorem a slaboproudou řídící digitální elektronikou. Jde o různé dvou a vícekanálové poloviční i plné spínací můstky s MOSFET tranzistory pro proudy až 10 A s širokou výbavou podpěťových a předpěťových, nadproudových a tepelných ochran s napojením na řídící procesory prostřednictvím logických TTL/CMOS vstupů (např. MC33886, MC33186), sériového rozhraní (např. MC34921), SPI či speciálním vstupem pro PWM signál (např. MC33880, MC33899). Dále tu jsou plné třífázové budiče (např. MC34929, MPC17517), sady MOSFET spínacích tranzistorů (např. MC13386, MC33396), nebo i speciální monolitické dvoukanálové H-můstky vyráběné technologií SMOS7 s režimy brždění, dopředný a zpětný chod apod. pro potřeby řízení krokových a stejnosměrných motorků ve fotoaparátech, kamerách a podobně bateriově napájené spotřební elektronice (např. MPC17C724, MPC17531, MPC17510 a další).
Speciální obvody pro řízení motorů s MCU jádrem HC08
Více než u kterýchkoli jiných aplikacích se u řízení motorů stává, že i když samotný algoritmus řízení není složitý, obyčejné univerzální mikrokontroléry již nějakou částí své výbavy nestačí, ale zároveň po cenové stránce není výhodné sahat po obvodech vyšší třídy.
Pro tyto účely řízení firma Freescale vyvinula několik speciálních verzí, resp. řad integrovaných obvodů, které se sice vyznačují 8bitovým jádrem HC908 z běžných univerzálních mikrokontrolérů, ale proti nim navíc obsahují právě takové periferie v takovém množství, které jsou například nezbytné pro frekvenční řízení 3fázových motorů. Navíc s využitím technologie SMARTMOS, která dovoluje na jeden křemíkový substrát implementovat k digitálním obvodům i výkonové prvky, je možné mít vše v jedné součástce bez potřeby velkého množství externích periferních obvodů.
MCU M68HC908MRxx
Tyto mikrokontroléry se proti svým univerzálním kolegům typu HC908QT či QY vyznačují přítomností speciálního 6kanálového 12bitového PWM modulu, potřebného pro 3fázové řízení motorů. Jednotlivé typy řady se pak liší pouze velikostí vnitřní Flash paměti (8/16/32 kB Flash). Základní vlasnosti:
|
Provedení 6kanálového PWM modulu a jeho možné použití pro 3fázové řízení motoru (pro zvětšení klikněte na obrázky) |
Obvody MM908E425 a MM908E62x
Součástky označené jako MM908E425 a MM908E62x jsou speciálními kombinovanými digitálně-analogovými integrovanými obvody, které jsou v rámci jedné součástky (jednoho pouzdra) tvořeny dvěma oddělenými částmi:
- digitální částí tvořené jádrem mikrokontroléru M68HC908EY16
- analogovým výkonovým obvodem vytvořeným technologií SMARTMOS
Obě části pak spolu uvnitř komunikují prostřednictvím SPI. Zatímco digitální část obsahuje mimo výpočetního jádra i Flash a RAM paměť, časovač, rozšířené sériové komunikační rozhraní ESCI, A/D převodník a interní modul generátoru hodin, analogová část speciálně určená pro použití s motory poskytuje plný nebo poloviční MOSFET můstek (dle typu) a výkonový výstup nebo výstupy s diagnostickými funkcemi, vstup či vstupy pro Hallův senzor, analogové vstupy s regulovatelným zdrojem proudu, napěťový regulátor a fyzickou vrstvu propojovací komunikační sběrnice LIN. Jednotlivé typy integrovaných obvodů se mezi sebou hlavně liší provedením analogové části, konkrétně provedením a počtem výkonových výstupů (plné můstky, poloviční můstky nebo jednoduché jedním MOSFET tranzistorem spínané výstupy) a přítomností vstupů pro Hallův senzor.
Základní vlastnosti:
|
Příklad základního zapojení obvodu MM908E621 |
Blokové schéma vnitřního zapojení hybridního obvodu MM908E621 pro řízení motorů (pro zvětšení klikněte na obrázky)
 MC3PHAC
Monolithic Intelligent Motor Controller
MC3PHAC
Monolithic Intelligent Motor Controller
Integrovaný obvod MC3PHAC je speciální výkonný monolitický inteligentní mikrokontrolér založený na jádru MCU HC908, který slouží pro snadnou realizaci řízení třífázových střídavých motorů. K tomu je vybaven všemi potřebnými prostředky pro potřeby regulace spouštění, brždění a řízení rychlosti. Unikátním aspektem obvodu je jeho adaptace a konfigurace na okolní podmínky a však nevyžaduje od uživatele použít žádný vývojový software. Obvod lze totiž ovládat analogově pomocí externě připojených potenciometrů nebo digitálně příkazy zasílanými po sériové sběrnici z jiného libovolného procesoru. Funkce obvodu se pak nastavuje změnou hodnot vnitřních registrů prostřednictvím libovolného MCU a sériové komunikační sběrnice.
Základní vlastnosti:
|
Příklad zapojení inteligentního řadiče MC3PHAC pro potřeby řízení zrychlení, rychlosti a zapnutí/vypnutí motoru |
Blokové schéma možností a použití integrovaného řadiče motorů MC3PHAC
Závěr
Pro potřeby realizace regulace a ovládání elektromotorů všeho druhu poskytuje Freescale velmi kvalitní součástkovou základnu, kde lze snadno vybrat ten pravý obvod či obvody. Zvláště v oblasti digitálního řízení má Freescale mnoho univerzálních i specializovaných zástupců. Bližší podrobnosti o všech v tomto článku zmíněných integrovaných obvodech Freescale lze nalézt na firemní stránkách www.freescale.com. Existují i české stránky české pobočky Freescalu na www.freescale.com/webapp/sps/site/homepage.jsp.
Antonín Vojáček
DOWNLOAD & Odkazy
- Domovská stránka firmy Freescale, výrobce integrovaných obvodů pro řízení motorů- www.freescale.com
- Domovská stránka české pobočky firmy Freescale - www.freescale.com/webapp/sps/site/homepage.jsp



