Pro měření pohybu, posuvu, otáčení, rychlosti apod. je možné využít rotačních senzorů, často označovaných jako enkodéry. I na tomto poli dochází k implementaci nových technologií, aby měření bylo přesnější a vyžadovalo méně místa. Následující článek se pak zaměřuje na slibně se rozvíjející laserové interferenční rotační enkodéry (senzory), které se vyznačují přesným měřením a velkou přesností.


 Rotační
senzory (enkodéry) jsou zařízení, která se obecně mohou použít v aplikacích,
kde se měří délka, pozice, rychlost, úhel natočení nebo všechny veličiny, které
na ně lze převést. Provádějí přeměnu mechanického pohybu na elektrické signály.
Existuje několik fyzikálních principů, které využívají. Mezi ty zatím méně běžné
je využití laserové interferometrie.
Rotační
senzory (enkodéry) jsou zařízení, která se obecně mohou použít v aplikacích,
kde se měří délka, pozice, rychlost, úhel natočení nebo všechny veličiny, které
na ně lze převést. Provádějí přeměnu mechanického pohybu na elektrické signály.
Existuje několik fyzikálních principů, které využívají. Mezi ty zatím méně běžné
je využití laserové interferometrie.
Celosvětově existuje několik firem, které se jejich vývojem zabývají. Jednou z nich je i firma CANON, která již od roku 1986 průběžně vyvíjí a zdokonaluje rotační laserový enkodér založený na difrakci/interferenci vysílaného laserového paprsku.
Použití
Laserové rotační senzory (enkodéry) lze použít například k následujícím aplikacím:
- přesné měření pozice
 měření
malých posuvů
měření
malých posuvů- měření a odměřování délky
- měření i malých natočení
- řízení a regulace natočení motorů a převodovek
- měřiče a snímače rychlosti
- přesná regulace otáček
- kopírky a tiskárny
- regulace zaostřování objektivů fotoaparátů a kamer
Princip funkce laserových interferenčních senzorů
Laserový interferenční rotační senzor nebo enkodér (jak chcete) je obecně složen z následujících částí:
- rotující difrakční kotouč s optickou mřížkou (grating disc) připevněný na hřídeli senzoru
- laserový vysílač s děličem paprsku tvořený malým polovodičovým laserem a optickým hranolem
- zrcadla (mirrors) pro zpětný odraz paprsků po průchodu kotoučem
- interferometr - optický přijímač pro převod interference (proměnné amplitudy intenzity světla) na el. signál
Firma Canon vyvinula rotační laserový enkodér (senzor otáčení), který využívá difrakce a interference vysílaných laserových paprsků. Využívá optický systém založený na optickém hranolu a difrakční mřížce. Tento systém umožňuje významně snížit velikost enkodéru, ale přesto udržet vysokou přesnost.
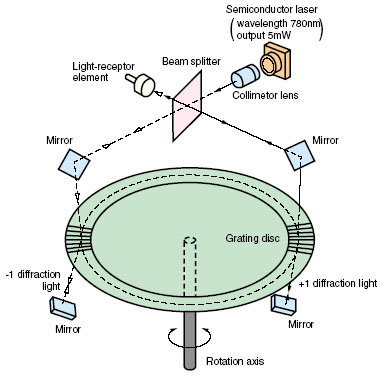
Princip a obecná struktura laserového interferometrického rotačního enkodéru
Jak ukazuje obrázek výše, dva ekvidistantní laserové paprsky, rozdělené hranolem z jednoho vysílaného, ozařují zároveň dvě symetrická místa vzhledem ke středu otáčení přesného difrakčního disku. Tato konfigurace kompenzuje excentricitu disku, která může lehce způsobit velkou chybu měření. Disk po celém obvodu v místě dopadu paprsků obsahuje přesnou optickou difrakční mřížku, která provádí ohyb (difrakci) světla. Zatímco otáčením disku jeden paprsek podlehne pozitivní difrakci 1. řádu, ten symetrický druhý pak negativní difrakci 1. řádu. Pro každou periodu otočení pak +/- difrakce 1. řádu změní fázi paprsku o +/- 2π (tj. +/- 2"pí"). Následný odraz takto změněného paprsku zpět na průchod kotoučem tedy způsobí změnu fáze o +/- 4π. Reflexní optický systém tak eliminuje chybu měření změnou okolní teploty, která působí na stabilitu polovodičového laseru. V tomto uspořádání již otočení o 1 mřížkovou periodu způsobí vznik jasového interferenčního obrazce. To zajišťuje velkou přesnost měření při natočení již jen o malý úhel a při kontinuálním otáčení poskytuje velkou hustotu impulsů. Interferenční obrazec je pak snímán interferometrem, který převádí obrazec na elektrických signál pomocí optoelektrického vícereceptorového snímače. Interferenční princip tak pohybem rotujícího disku sinusově moduluje intenzitu paprsku světla a na konci optické cesty se mění na elektrický signál. Výstupem ze senzoru je posloupnost impulsů jejichž hustota v časové jednotce odpovídá rychlosti otáčení.
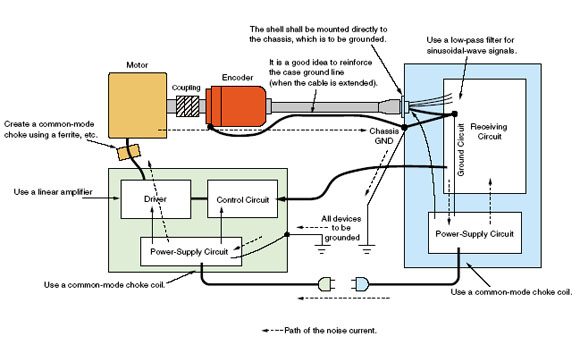
Příklad použití a obecného zapojení rotačního enkodéru do zpětnovazební regulační smyčky otáčení motoru
Laserové rotační enkodéry Canon
V případě senzorů Canon řady K-1 je difrakční kotouč rozdělen na 81 000 optických mřížek umístěných radiálně podél okraje disku o průměru 36 mm. Interferované světlo je snímáno, detekováno a převáděno na elektrický napěťový signál pomocí vícereceptorového optoelektrického snímače o velikosti 4 x 5 mm, která poskytuje rozlišení 1 mikrometr. Na jeho výstupu jsou 3 kanály A, B a Z. Elektrický signál kanálů A a B jsou buď v provedení posloupnosti impulsů (obdélníků) nebo analogového sinusového signálu a měří rotační pohyb. Kanál Z pak určuje otáčku o 360°, příp. i naznačuje směr otáčení - viz obrázky níže.
Některé vybrané senzory z nabídky Cannonu:
Senzor X-1M
- Rozlišení:
225 000 period sinus. průběhu na otočku
- Max. rychlost otáčení: 180 rpm
- Max. frekvenční odezva: 675kHz
- Otočení na impuls: 5.76 arc-sec
- Výstupy: 2kanálový sinusový signál A a B se vzájemně posunutou fází o 90° + Z impulsy otočení o 360°
- Chyba fáze: 90°±5° (0~113kHz: 0~30rpm), 90°±10° (~450kHz: ~120rpm), 90°±15° (~675kHz: ~180rpm)
- Zdroj světla: polovodičový Laser 780nm, max. 5mW
- Napájení: +/- 5V DC, 260 mA
- Pracovní teplota: 10 až 40 °C
Typický průběh signálů kanálů A, B a Z senzoru X-1M
Senzor R-10
- Rozlišení:
81 000 pulsů na otočku
- Max. rychlost otáčení: 360 rpm
- Max. frekvenční odezva: 500 kHz
- Otočení na impuls: 16 arc-sec
- Výstupy: 2kanálový obdélníkový signál A a B se vzájemně posunutou fází o 90° + Z impulsy otočení o 360°
- Zdroj světla: polovodičový Laser 780nm, max. 5mW
- Průměr disku: 38 mm
- Napájení: +/- 5V DC, 200 mA
- Pracovní teplota: 0 až 50 °C
Typický průběh signálů kanálů A, B a Z senzoru R-10
Senzor R-1P20
 Rozlišení:
405 000 pulsů na otočku
Rozlišení:
405 000 pulsů na otočku- Max. rychlost otáčení: 240 rpm
- Max. frekvenční odezva: 1.62 MHz
- Otočení na impuls: 3.2 arc-sec
- Výstupy: 2kanálový obdélníkový signál A a B se vzájemně posunutou fází o 90° + Z impulsy otočení o 360°
- Zdroj světla: polovodičový Laser 780nm, max. 5mW
- Napájení: +/- 5V DC, 250 mA
- Pracovní teplota: 0 až 50 °C
Senzor KP-1Z
 Rozlišení:
81 000 period sinus. průběhu na otočku
Rozlišení:
81 000 period sinus. průběhu na otočku- Max. rychlost otáčení: 360 rpm
- Max. frekvenční odezva: 500 kHz
- Otočení na impuls: 16 arc-sec
- Výstupy: 2kanálový analogový sinusový signál A a B se vzájemně posunutou fází o
90° + obdélníkový signál Z pro informaci o otočení o 180°
- Zdroj světla: polovodičový Laser 780nm, max. 5mW
- Průměr disku: 48 mm
- Napájení: +/- 5V DC, 200 mA
- Pracovní teplota: 0 až 50 °C
Typický průběh signálů kanálů A, B a Z senzoru KP-1Z
Závěr
V dnešním automatizovaném světě a hlavně robotice se nelze bez rotačních senzorů (enkodérů) obejít. Stále častěji se však od nich vyžadují menší rozměry a přesnější měření. Tyto vlastnosti právě vykazují laserové enkodéry a protože polovodičové lasery a ostatní využívané komponenty jsou čím dál lepší a hlavně levnější, mají další budoucnost jistě zajištěnou.
Antonín Vojáček
vojacek@ hwg.cz
DOWNLOAD & Odkazy
- Oficiální firemní stránky firmy Canon: www.canon.com
- Článek "Princip optických enkodérů polohy pro řízení motorů" na serveru automatizace.HW.cz
- Článek "Inkrementální rotační senzory firmy Kubler" na serveru automatizace.HW.cz



