Na světě existují nejen klasické motory pracující na principu elektromagnetické indukce, ale také tzv. ultrazvukové, využívající piezoelektrický jev. Ty se vyznačují úplně jinými vlastnostmi a jdou použít i tam, kde jiné motory jsou nepoužitelné. Zvláště v aplikacích vyžadující přesné krokování, přesný kontinuální běh nebo velmi častý rozběh a zastavení. Ultrazvukové motory při miniaturních velikostech poskytují dost velký výkon.


Když se řekne "ultrazvukové motory (ultrasonic motors)", málo kdo si přesně vybaví, co to vlastně je. Pod téměř exotickým názvem se skrývají rotační i lineární miniaturní a malé pohony se schopností velmi přesného řízení pohybu, jak rychlosti, tak i pozice natočení. Nejlepší ultrazvukové motory umožňují dokonce krokovat natočení v desítkách pikometrů (pm) ! To je miliontina mikrometru. Přitom princip této technologie je vcelku prostý a využívá piezoelektrického jevu.
Základní idea funkce
 Základní
idea funkce ultrazvukových motorů je až triviální. Představte si ležící mobilní
telefon na rovném stole. Tam také často bývá. V tom někdo zavolá a mobil s nastaveným
vibračním vyzváněním začne vibrovat. Pokud telefon má silné vyzvánění, začne
se vlivem vibrací (nadskakování) po stole posouvat. A tak vznikne na krátkou
dobu z mobilu převodník elektrické energie na mechanickou, tedy na pohyb. A
přesně něco podobného využívají i ultrazvukové motory.
Základní
idea funkce ultrazvukových motorů je až triviální. Představte si ležící mobilní
telefon na rovném stole. Tam také často bývá. V tom někdo zavolá a mobil s nastaveným
vibračním vyzváněním začne vibrovat. Pokud telefon má silné vyzvánění, začne
se vlivem vibrací (nadskakování) po stole posouvat. A tak vznikne na krátkou
dobu z mobilu převodník elektrické energie na mechanickou, tedy na pohyb. A
přesně něco podobného využívají i ultrazvukové motory.
Ty využívají vibrací piezoelektrického materiálu - stator, který se po připojení signálového napětí o dostatečně vysoké frekvenci střídavě smršťuje a roztahuje v rytmu periodu signálu. Začne tedy jakoby poskakovat, ale protože je upevněný, začne udělovat pohyb (odstrkovat) k tomu uzpůsobený volný díl - rotor. Ten již pohyb předává vnějšímu připojené mechanismu. A motor je na světě.
Druhy ultrazvukových motorů
Stejně jako klasické elektromagnetické motory, i ty ultrazvukové se vyrábějí ve dvou pohybových provedeních:
- lineární motory - produkují konečný přímý pohyb
- rotační - produkují klasický nekonečný rotační pohyb
V nabídkách firem jsou zatím zastoupené tak zhruba 50:50. Zatímco ty v lineárním provedení jsou od klasických rozdílné, rotační ultrazvukové motory vypadají někdy na první pohled podobně jako ty indukční motory.
V praxi se objevují dva základní funkční principy ultrazvukových piezoelektrických motorů:
- rezonanční / třecí motor (resonant / friction motor)
- krokové / chodící motory (step / walk motor)
Přičemž první typ byl vyvinut dříve a je tedy běžnější než ten druhý.
Vlastnosti ultrazvukových motorů vs. klasické
 Malé
až miniaturní rozměry
Malé
až miniaturní rozměry- Malá spotřeba
- Velmi lehký
- Dlouhá životnost více jak 20 000 hodin
- Velké zrychlení i přes 20 g
- Minimální nastavitelný krok až 50 pikometrů
- Rychlost pohybu (otáčení) až 1 m/s
- Tažná/tlačná síla až 600 N
- Snadné řízení rychlosti a kroku
- Snadná regulace přímá i se zpětnou vazbou
- Motor napájení drží nastavenou pozici
- Negenerují žádné teplo
- Vysoká účinnost
- Minimální generování rušení
- Jednoduchá technologie znamená nízkou cenu
Použití
- Optoelektroniká zařízení
- Zaostřování digitálních fotoaparátů a kamer
- Mikromanipulace
- Mikroskopie
- Metrologie
- Přesné mikroobrábění
- Zařízení pro výrobu integrovaných obvodů
- Lékařská technika
- Robotika
- apod.
Princip a vlastnosti rezonančních/třecích motorů
Lineární motor PI
 Princip
a vlastnosti rezonančního typu ultrazvukových motorů ukážu na lineárních motorech
firmy Physik Instrumente GmbH & Co. KG, často zkráceně označované jako PI.
Princip
a vlastnosti rezonančního typu ultrazvukových motorů ukážu na lineárních motorech
firmy Physik Instrumente GmbH & Co. KG, často zkráceně označované jako PI.
Srdcem jejich mechanismu je obdélníkový monolitický piezokeramický plátek (Piezo
Actuator) pracující jako stator, a který je na jedné straně rozdělen dvěmi budícími
elektrodami (excitation elektrodes). V závislosti na požadovaném směru pohybu
se budí levá nebo pravá elektroda piezokeramického plátku budícími pulsy, které
způsobují vznik vlastních vysokofrekvenční oscilací piezoplátku na frekvenci
několik desítek nebo stovek kHz. Hliníkoví třecí hrot (posunovač - Friction
Tip) připevněný na plátku se vychyluje podél přímé trajektorie dle rezonanční
frekvence plátku. Skrz jeho kontakt s třecím proužkem (friction bar) tak poskytuje
mechanické mikroimpulsy a provádí pohyb 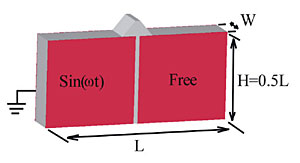 mechanickou
částí (rotor - bearing) směrem dopředu nebo zpět. S každým cyklem oscilací mechanika
vykoná krok o velikosti několika nanometrů. V makroskopickém měřítku jde o hladký
pohyb s virtuálně neomezeným rozsahem. Budící síla je odebírána z podélné složky
oscilací, zatímco příčná složka slouží k zvýšení nebo snížení tlaku na třecí
hrot proti třecímu nosníku. Příčná energie oscilací určuje maximální třecí sílu
a přídržnou sílu budící síly motoru. Současné ultrazvukové motory tohoto typu
mohou generovat zrychlení až 20 g, rychlost pohybu až 800 mm/s (0,8 m/s) a tažnou
sílu až 50 N. Minimální krok (posun) je okolo 50 nm. Rychlost i délka kroku
se snadno řídí pomocí frekvence a délky budících pulsů.
mechanickou
částí (rotor - bearing) směrem dopředu nebo zpět. S každým cyklem oscilací mechanika
vykoná krok o velikosti několika nanometrů. V makroskopickém měřítku jde o hladký
pohyb s virtuálně neomezeným rozsahem. Budící síla je odebírána z podélné složky
oscilací, zatímco příčná složka slouží k zvýšení nebo snížení tlaku na třecí
hrot proti třecímu nosníku. Příčná energie oscilací určuje maximální třecí sílu
a přídržnou sílu budící síly motoru. Současné ultrazvukové motory tohoto typu
mohou generovat zrychlení až 20 g, rychlost pohybu až 800 mm/s (0,8 m/s) a tažnou
sílu až 50 N. Minimální krok (posun) je okolo 50 nm. Rychlost i délka kroku
se snadno řídí pomocí frekvence a délky budících pulsů.
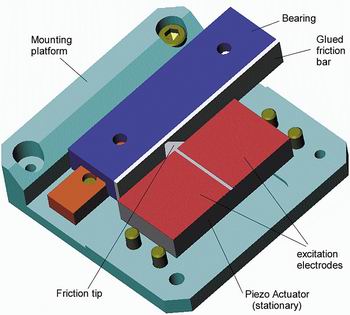
Vnitřní struktura a externí provedení ultrazvukového rezonančního motoru řady PILine firmy PI
Rotační motor CANON
CANON patří mezi vedoucí firmy, které již uplatňují ultrazvukové motory v komerční sféře - spotřební a kancelářské elektronice. I když základní princip funkce je stejný jako u výše uvedených lineárních motorech PI, provedení je odlišné. Také zde pružný stator generuje vibrace, jejichž výsledkem je tření pohánějící pohyblivý volný rotor ve specifikovaném směru. Protože se pro vytváření pohybu využívá vibrací generované vysokofrekvenčním signálem, je výsledná rychlost rotace v absolutních číslech malá. I tak se však vytváří větší kroutící moment, než který by byl vytvořit schopen vytvořit stejně malý klasický indukční elektromagnetický indukční motor.

Provedení tzv. knoflíkových ultrazvukových motorů Canon (vlevo), struktura a princip funkce (vlevo i vpravo)
Ultrazvukový motor firmy CANON se skládá z:
- pevný stator - piezoelektrické keramické elementy (výčnělky) na kovovém kruhu, které se pro přiložení střídavého el.pole (napětí) roztahují a smršťují
- volný rotor - poháněný třením vychylovaných elementů statoru o kontaktní plochu rotoru
Piezoelektrické keramické elementy (výčnělky) na statoru jsou vzájemně polarizovány. Externě generované střídavé napětí s frekvencí 30 kHz je použito ke generování stacionární vibrační vlny s amplitudou okolo 1 mikrometru. Další stacionární vlna o přesně stejné frekvenci (vln. délce) jako ta první, ale s fázově posunutá o 1/4 periody, je generována k syntetizování vln, čímž se vytváří "vychylující pohybující se vibrační vlna (deflection traveling vibration wave)" zajišťující otáčivé vibrační pole, díky které se rotor otáčí.
Struktura statoru a rotoru ultrazvukových motorů Canon (vlevo) a princip buzení (vlevo)
Princip a vlastnosti krokových/chodících motorů
 Princip
krokových ultrazvukových motorů je založen na dvojité piezoelektrické struktuře
(stator), která mezi sebou svírá pohybující se nosník nebo kotouč (rotor). Každá
ze symetrických částí piezostruktury obsahuje dva sloupce dvou typů piezokrystalů
(piezo stack) připevněné k základové desce (baseplate). Ta je vertikálně tlačena
na rotor silou F. Piezostack obsahuje dva na sobě umístěné různě orientované
piezoelementy s rozdílnou piezoelektrickou konstantou (koeficientem prodloužení).
Zatímco element s koeficientem d33 se smršťuje a roztahuje ve vertikálním směru
(kolmém na rotor), element s d15 má smykovou roztažnost, tzn. roztahuje se a
smršťuje v úhlopříčce.
Princip
krokových ultrazvukových motorů je založen na dvojité piezoelektrické struktuře
(stator), která mezi sebou svírá pohybující se nosník nebo kotouč (rotor). Každá
ze symetrických částí piezostruktury obsahuje dva sloupce dvou typů piezokrystalů
(piezo stack) připevněné k základové desce (baseplate). Ta je vertikálně tlačena
na rotor silou F. Piezostack obsahuje dva na sobě umístěné různě orientované
piezoelementy s rozdílnou piezoelektrickou konstantou (koeficientem prodloužení).
Zatímco element s koeficientem d33 se smršťuje a roztahuje ve vertikálním směru
(kolmém na rotor), element s d15 má smykovou roztažnost, tzn. roztahuje se a
smršťuje v úhlopříčce.
Přirovnání k chůzi je nasnadě, protože element s koeficientem d13 jakoby přizvedne celou strukturu nad rotor (podobné ke zvednutí nohy) a smykově roztažný piezoelement d15 (jakoby chodidlo) se spodní hranou posune o několik nanometrů dopředu. Po opětovném dosednutí struktury na rotor a smrštění smykového elementu se vykoná posun rotoru. Celá struktura tak jakoby udělala krok v požadovaném směru. Výhodou uvedeného systému je v tom, že bez přivedeného řídícího a napájecího signálu je rotor z obou stran pevně přitisknut mezi obě strany dvojité piezostruktury (čelistí) statoru a nelze s nimi pohnout. A tak je rotor odpojeného motoru automaticky zajištěn proti pohybu a nastavená pozice je držena libovolně dlouho.
Princip a základní struktura krokových/chodících ultrazvukových motorů
 Napájení
a řízení tohoto motoru se provádí obdélníkovým signálem, kde frekvencí/periodou
se řídí rychlost pohybu (otáčení) a amplitudou obdélníků pak délka kroku. Ta
je díky výše popsanému principu přesně dána velikostí roztažení a smrštění smykového
elementu a lze tedy přesně řídit napětím na něj přivedeným. Nejnovější a nejlepší
krokové/chodící ultrazvukové motory řady NEXLINE firmy PI mohou mít délku kroku
jen 50 pikometrů a lze tak s nimi řídit pohyb miniaturních nebo velmi přesné
mechaniky (např. optické prvky, natáčení zrcátek a posuv čoček, natočrní substrátu
při výrobě chipů integrovaných obvodů apod.). Také obsahují hned několik "chodících"
struktur a i když jeden krok má velikost v řádu nano a mikrometrů, při buzení
signálem s frekvencí několika stovek Hz nebo jednotek až desítek kHz se pak
pohyb opět jeví jako kontinuální. Motor pak dosahuje rychlostí až stovek mm/s
a tlačné síly až 600 N.
Napájení
a řízení tohoto motoru se provádí obdélníkovým signálem, kde frekvencí/periodou
se řídí rychlost pohybu (otáčení) a amplitudou obdélníků pak délka kroku. Ta
je díky výše popsanému principu přesně dána velikostí roztažení a smrštění smykového
elementu a lze tedy přesně řídit napětím na něj přivedeným. Nejnovější a nejlepší
krokové/chodící ultrazvukové motory řady NEXLINE firmy PI mohou mít délku kroku
jen 50 pikometrů a lze tak s nimi řídit pohyb miniaturních nebo velmi přesné
mechaniky (např. optické prvky, natáčení zrcátek a posuv čoček, natočrní substrátu
při výrobě chipů integrovaných obvodů apod.). Také obsahují hned několik "chodících"
struktur a i když jeden krok má velikost v řádu nano a mikrometrů, při buzení
signálem s frekvencí několika stovek Hz nebo jednotek až desítek kHz se pak
pohyb opět jeví jako kontinuální. Motor pak dosahuje rychlostí až stovek mm/s
a tlačné síly až 600 N.
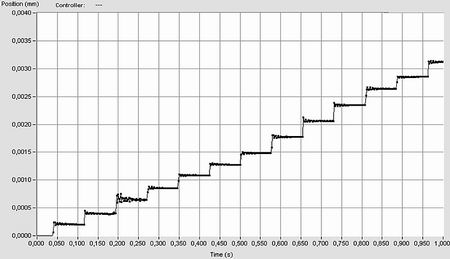
Příklad pohybu ultrazvukového motoru po 300 nm krocích
Závěr
Ultrazvukové motory patří mezi největší novinky v oblasti pohonů. Jde o zajímavý, ale v zásadě jednoduchý princip, který však poskytuje zajímavé vlastnosti a možnosti. Ultrazvukové motory se nesnaží a ani nemohou konkurovat klasickým elektromagnetickým motorům. Spíše vyplňují mezeru a umožňují realizovat aplikace, kde již klasické motory z fyzikální podstaty své funkce prostě nemohou pracovat. Ultrazvukové motory jistě čeká světlá budoucnost. Zanedlouho se také objeví na stránkách automatizace.HW.cz v 2. pokračování článku, kde se již zaměřím na reálné produkty, které lze nalézt v nabídkách některých firem na celosvětovém trhu.
Antonín Vojáček
vojacek@ hwg.cz
DOWNLOAD & Odkazy
- Domovská stránka firmy PI (Physik Instrumente GmbH & Co. KG), výrobce ultrazvukových motorů - www.pi.ws
- Domovská stránka firmy Canon, výrobce ultrazvukových motorů pro spotřební elektroniku - www.canon.com
- Článek o obecném principu, funkci a výpočtech piezoelekrických elementů na serveru automatizace.HW.cz
- Článek "Princip optických enkodérů polohy pro řízení motorů" na serveru automatizace.HW.cz



