
Problematika zajištění bezpečnosti práce s roboty
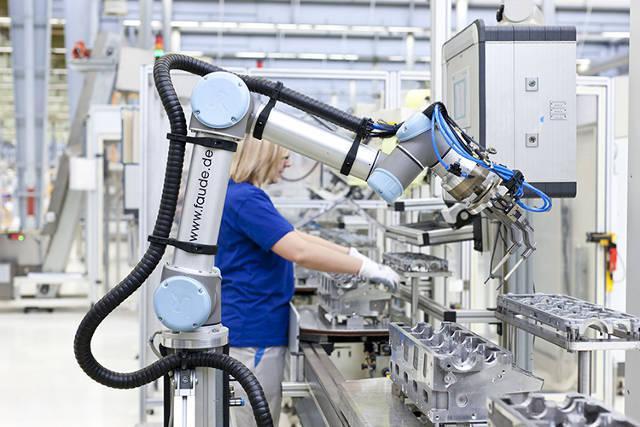
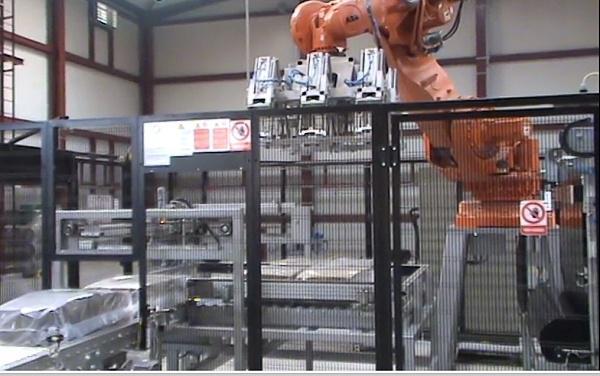 Problematika zajištění reálné bezpečnosti robotů při práci s lidmi je s rostoucím zastoupením robotů ve všech složkách výroby stále více aktuální. Ideální by bylo, kdyby mohli roboti pracovat rychle a současně pro lidskou obsluhu zcela bezpečně i bez nepříjemných mechanických zábran typu bezpečnostního oplocení, které jednat znesnadňují přístup k pracovnímu prostoru a manipulaci v něm a jednak omezují běžný výhled na pracovní proces pro potřeby snadné zběžné kontroly. Ano je možné jako alternativu mechanických zábran například použít bezpečností laserové skenery, které umožňují bezpečnostní sítě zcela eliminovat a přitom nijak nesnížit stupeň ochrany. Ale jak v případě bezpečnostních mechanických zábran, tak i v případě různých bezpečnostních optických detekčních systémů, stále jde v principu o tutéž situaci, tedy udržet lidi (lidské operátory či obsluhu) spolehlivě v takové vzájemné vzdálenosti lidí od pracujícího (pohybujícího se) robota, aby nemohlo v žádném náhodném okamžiku dojít k jejích fyzickému kontaktu nebo již nebezpečnému vzájemnému přiblížení. V případě, že k potenciálně nebezpečnému přiblížení lidí a robota dojde, je nutné iniciovat okamžité zastavení pohybu robota. Co ale dělat v aplikacích, když lidé potřebují mít přímý přístup k robotovi na kontaktní vzdálenost i v době jeho činnosti ? Tedy potřebují s ním spolupracovat?
Problematika zajištění reálné bezpečnosti robotů při práci s lidmi je s rostoucím zastoupením robotů ve všech složkách výroby stále více aktuální. Ideální by bylo, kdyby mohli roboti pracovat rychle a současně pro lidskou obsluhu zcela bezpečně i bez nepříjemných mechanických zábran typu bezpečnostního oplocení, které jednat znesnadňují přístup k pracovnímu prostoru a manipulaci v něm a jednak omezují běžný výhled na pracovní proces pro potřeby snadné zběžné kontroly. Ano je možné jako alternativu mechanických zábran například použít bezpečností laserové skenery, které umožňují bezpečnostní sítě zcela eliminovat a přitom nijak nesnížit stupeň ochrany. Ale jak v případě bezpečnostních mechanických zábran, tak i v případě různých bezpečnostních optických detekčních systémů, stále jde v principu o tutéž situaci, tedy udržet lidi (lidské operátory či obsluhu) spolehlivě v takové vzájemné vzdálenosti lidí od pracujícího (pohybujícího se) robota, aby nemohlo v žádném náhodném okamžiku dojít k jejích fyzickému kontaktu nebo již nebezpečnému vzájemnému přiblížení. V případě, že k potenciálně nebezpečnému přiblížení lidí a robota dojde, je nutné iniciovat okamžité zastavení pohybu robota. Co ale dělat v aplikacích, když lidé potřebují mít přímý přístup k robotovi na kontaktní vzdálenost i v době jeho činnosti ? Tedy potřebují s ním spolupracovat?
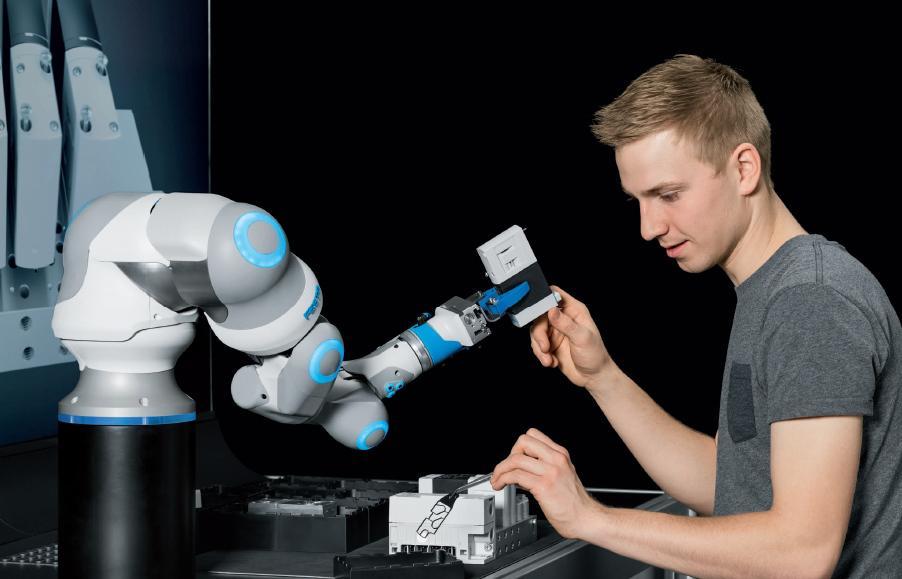 Z těchto důvodů vznikla před několika lety kategorie tzv. kolaborativních robotů, kteří by to měli umožňovat. Propagace a marketing této nové kategorie sice na bezproblémové spolupráci takového kolaborativního robota a lidí přímo staví svojí prodejnost, ale praxe je však mnohem složitější. I provoz kolaborativních robotů s možným volným fyzickým kontaktem s lidmi (s části lidského těla) a bez přídavných vnějších bezpečnostních prvků je omezen na jen velmi pomalé pohyby a aplikováním jen malých sil (manipulaci jen s lehkými předměty). V tomto režimu je u nich bezpečnost obvykle zajištěna měřením momentů sil speciálními velmi citlivými snímači integrované v jejich kloubech (osách pohybu) u rychlejších a silnějších provedení kolaborativních robotů nebo jen měřením úrovně elektrických proudu zatížení elektromotorů u malých a málo silných robotů. V tomto směru pak různí vyrobci zkouší vynalézt a implementovat i různé mechanické, elektromechanické či pneumatické systémy kluzných spojek či převodů, který při vzniku dostatečného protitlaku "povolí" a přestanou přenášet vyvíjenou sílu robota ve směru, ve kterém došlo k mechanickému kontaktu. Tyto systémy však stále více či méně velmi omezují nosnost a pracovních rychlost robota.
Z těchto důvodů vznikla před několika lety kategorie tzv. kolaborativních robotů, kteří by to měli umožňovat. Propagace a marketing této nové kategorie sice na bezproblémové spolupráci takového kolaborativního robota a lidí přímo staví svojí prodejnost, ale praxe je však mnohem složitější. I provoz kolaborativních robotů s možným volným fyzickým kontaktem s lidmi (s části lidského těla) a bez přídavných vnějších bezpečnostních prvků je omezen na jen velmi pomalé pohyby a aplikováním jen malých sil (manipulaci jen s lehkými předměty). V tomto režimu je u nich bezpečnost obvykle zajištěna měřením momentů sil speciálními velmi citlivými snímači integrované v jejich kloubech (osách pohybu) u rychlejších a silnějších provedení kolaborativních robotů nebo jen měřením úrovně elektrických proudu zatížení elektromotorů u malých a málo silných robotů. V tomto směru pak různí vyrobci zkouší vynalézt a implementovat i různé mechanické, elektromechanické či pneumatické systémy kluzných spojek či převodů, který při vzniku dostatečného protitlaku "povolí" a přestanou přenášet vyvíjenou sílu robota ve směru, ve kterém došlo k mechanickému kontaktu. Tyto systémy však stále více či méně velmi omezují nosnost a pracovních rychlost robota.
 Pak jsou tu ještě i další inovativní řešení, které by šlo univerzálně implementovat nejen na kolaborativní roboty, ale případně i ostatní průmyslové roboty. Jak tedy zajistit, aby robotická ruka při kontaktu s překážkou či částí člověka to okamžitě zjistila a vyhnula se či okamžitě svůj pohyb zastavila? Je možné zkusit použít analogii s přírodou. Jak to dělá v podobné situaci každý živý tvor? Lidé a i většina suchozemských zvířat je vybavena citlivou kůží, která okamžitě informuje mozek živočicha (jeho řídící jednotku), že došlo ke kontaktu s nějakým předmětem. Co zkusit podobným citlivým povrchem zkusit vybavit i průmyslové roboty?
Pak jsou tu ještě i další inovativní řešení, které by šlo univerzálně implementovat nejen na kolaborativní roboty, ale případně i ostatní průmyslové roboty. Jak tedy zajistit, aby robotická ruka při kontaktu s překážkou či částí člověka to okamžitě zjistila a vyhnula se či okamžitě svůj pohyb zastavila? Je možné zkusit použít analogii s přírodou. Jak to dělá v podobné situaci každý živý tvor? Lidé a i většina suchozemských zvířat je vybavena citlivou kůží, která okamžitě informuje mozek živočicha (jeho řídící jednotku), že došlo ke kontaktu s nějakým předmětem. Co zkusit podobným citlivým povrchem zkusit vybavit i průmyslové roboty?
AIRSKIN - bezpečností kryty pro roboty s vlastnostmi kůže
 Tímto směrem se vydala rakouská společnost Blue Danube Robotics GmbH, která vyvinula speciální univerzální modulární systém měkkých a současně citlivých (snímacích) krytů a označila jej jako AIRSKIN. Tento jejich systém je plně certifikován jako plnohodnotný průmyslový bezpečnostní prvek splňující normy ISO 13849 pro splnění i té nejvyšší úrovně bezpečnosti PL e / Cat 3, normy EN 62061 až pro SIL3 nebo předpisu pro bezpečnost kolaborativních robotů ISO/TS 1506.
Tímto směrem se vydala rakouská společnost Blue Danube Robotics GmbH, která vyvinula speciální univerzální modulární systém měkkých a současně citlivých (snímacích) krytů a označila jej jako AIRSKIN. Tento jejich systém je plně certifikován jako plnohodnotný průmyslový bezpečnostní prvek splňující normy ISO 13849 pro splnění i té nejvyšší úrovně bezpečnosti PL e / Cat 3, normy EN 62061 až pro SIL3 nebo předpisu pro bezpečnost kolaborativních robotů ISO/TS 1506.
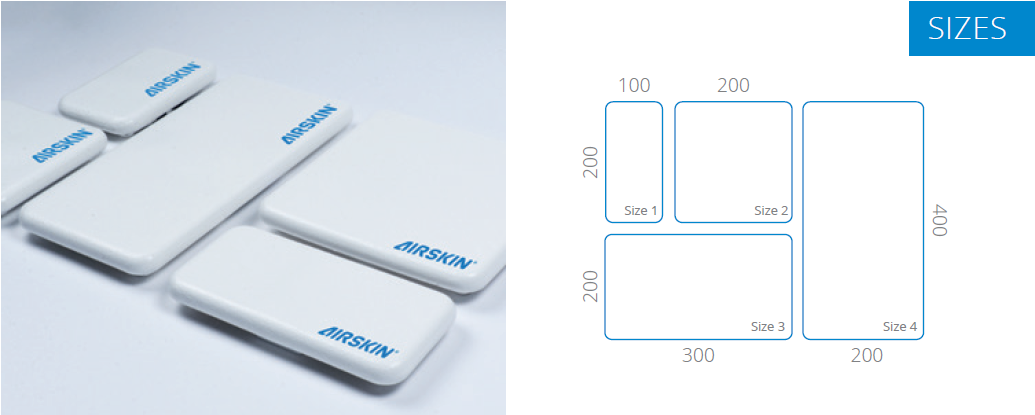
Velkou výhodou systému AIRSKIN je fakt, že jeho bezpečnostní výstupní signály jsou zcela standardní bezpečnostní dvojité OSSD spínané signály pro zapojení do jakéhokoliv standardní bezpečnostního systému robota či bezpečnostního PLC či relé, podobně jako například výstupy bezpečnostních optických systémů (např. bezpečnostních skenerů či optických bezpečnostních závor a bran). A protože systém AIRSKIN je v základu nabízen jako zcela univerzální modulární systém tvořený citlivými tvarovatelnými bloky o velikostech od 100x200mm až 400x200 mm lze jej prakticky aplikovat na libovolný typ robota, ba dokonce i na libovolný typ průmyslového zařízení, ať již to je to nějaké standardní automatické pojízdná či zdvihací zařízení (automatické či poloautomatické vozíky, jeřáby, zvedací plošiny apod.) nebo specializovaný robotický automat vytvořený na míru dané aplikaci (různé vkladače, pytlovače, zatavovače apod.). V případě robotických ramen pak lze jimi pokrýt nejen povrch ramene, ale i samotný koncový pracovní nástroj - prostě celého robota na tlak citlivým materiálem "obalit". Navíc je v nabídce i speciální nástavec i mezi pracovní stroj (např. uchopovací čelisti) a konec ramene, které hlídá sílu přitlačení ruky či jiné části lidského těla mezi nástroj a pevnou překážku (například podložku, nosník, stůl, stěnu apod.).
 Princip a struktura systému AIRSKIN
Princip a struktura systému AIRSKIN
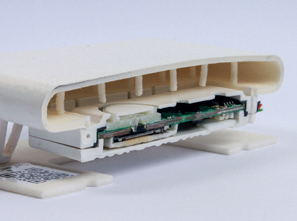
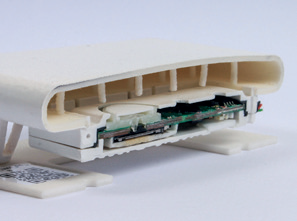
Základem systému AIRSKIN je speciální pantentovaný měkký umělohmotný materiál s pružností shore hardness A cca 88 (dle ISO 868) a teplotním pracovním rozsahem 5 až 40°C uspořádaný do podoby "polštářků" o velikostech od 100x200mm až 400x200 mm a několik speciálně tvarovaných, které jsou uvnitř duté - je v nich hermeticky uvařený vzduch.
Každý tento polštářek, který se pře speciální příchytky lepí na snímaný / hlídaný povrch pak obsahuje na své vnitřní straně snímač tlaku s vyhodnocovací elektronikou, která průběžně vyhodnocuje tlak vzduchu v polštářku.
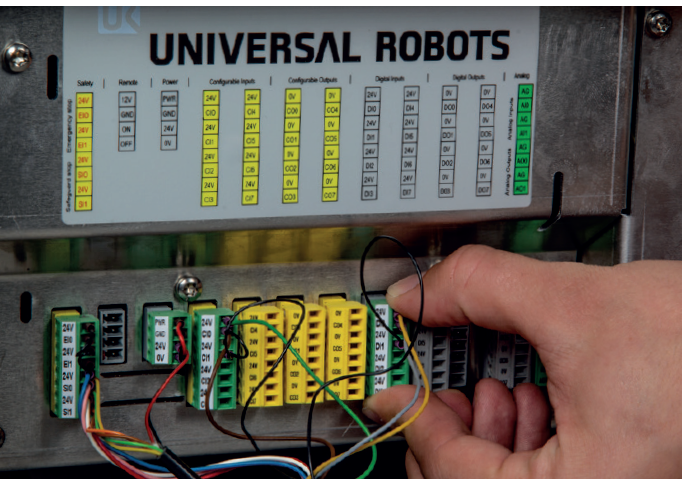
Při tlačení polštářku na jeho čelní snímací straně dojde k vyhodnocení zvýšení tlaku na snímač na jeho vnitřní straně a dojde tak k detekci dotyku. Jednotlivé polštářky jsou pak vzájemně propojeny přes flexibilní magnetické přichycené konektory 6-žilovými kablíky, které již přímo obsahují dva páry standardizované dva paralelní spínané bezpečnostní signály OSSD pro vstup do libovolné bezpečnostní vstupy robota nebo libovolné externí bezpečnostní jednotky a pak dva vodiče napájení 24 V DC pro elektroniku každé snímací plochy (polštářku). Jako každý správný certifikovaný elektronický bezpečností prvek, má i každé snímací plocha systému AIRSKIN vlastní průběžnou diagnostiku své funkce v případě detekce poruchy opět vygeneruje zastavovací bezpečnostní signál.

Princip funkce je z výše uvedeného popisu již nasnadě: při zatlačení na jakoukoliv snímací plochu (polštářek) dojde k vyhodnocení zvýšeného tlaku z dotyku a aktivován spínaný redundantní bezpečnostní signál pro bezpečností okruh robota/strojem, který vhodně na danou situaci zareaguje (např. zastaví nebo zpomalí pohyb robota). Reakce na dotyk tak jejiž závislá na vývojáři systému. Mimo vygenerování signálu pak měkké polštářky zároveň slouží i jako takový mechanický tlumič nárazu, podobně jako například airbag v automobilu tlumí náraz řidiče do volantu při nárazu. Toto tlumení tedy současně funguje jako ochrana při doběhu / zastavování stroje, který nemusí být okamžitá, ale může mít i nějaký malý pohybový určitý doběh.
Praktické výhoda univerzálního systému AIRSKIN
 Ve výsledku použití systému AIRSKIN umožňuje i z klasických průmyslových robotů či jiných pohybujících se nekolaborativních strojů je na kolaborativní provoz předělat a tím v určitých aplikacích i zcela eliminovat klasické ochranné ploty a kryty nebo optické bezpečnostní prvky. Ty díky bezpečnostní certifikaci může AIRSKIN zcela nahradit.
Ve výsledku použití systému AIRSKIN umožňuje i z klasických průmyslových robotů či jiných pohybujících se nekolaborativních strojů je na kolaborativní provoz předělat a tím v určitých aplikacích i zcela eliminovat klasické ochranné ploty a kryty nebo optické bezpečnostní prvky. Ty díky bezpečnostní certifikaci může AIRSKIN zcela nahradit.
V případě kolaborativních robotů pak aplikace AIRSKINu pak může zvýšit jejich pracovní provozní výkony až více než 2-násobně, například zvýšit rychlosti pohybu v kolaborativním režimu až na 800 mm/s, kterou ve standardním kolaborativním provozu nelze využít a pro tyto rychlosti musí být i kolaborativní robot vybaven přídavnými bezpečnostními prvky jako klasický průmyslová robot.
Výhodou univerzálních provedení snímacích plošek je možnost uživatelského přizpůsobení na libovolné zařízení a speciální upevňovací mechanismu s distančními prvky vytváří mezi snímacími plochami a povrchem robota či stroje volný dutý prostor umožňující standardní proudění vzduchu a tím nezamezování chlazení. Dle upevnění pak předstupují / rozšiřují povrch robota či zařízení o 20 až 80 mm (navýšení povrchu zařízení instalací snímacích ploch AIRSKIN). Jednotlivé snímací plochy se vzájemně sériově propojí kabely a koncový prvek v řetězci již zapoji na bezpečnostní vstupy řídící jednotky a zdroj provozního napájení 24 VDC. Takto lze za sebou sériově propojit a zapojit do jednoho vstupu bezpečností jednotky až 15 snímacích ploch.


Mimo to výrobce Blue Danube Robotics GmbH však již vyvinul i celé AIRSKIN sady pro konkrétní různé výrobce / typy robotů, včetně jejich otočných hlav pro upínání nástrojů i otočných kloubů, a tak v mnoha případech odpadá jakékoliv přizpůsobování. Prostě se jen koupí příslušná sada na konkrétní typ robotického ramene a případně i typ uchopovacího nástroje (ruky) a neinstaluje.
Aktuálně jsou podporovány ochranné kity pro následující výrobce robotů, chapadel, nástrojů a příslušenství robotů:
 Roboti:
Roboti:
- MITSUBISHI ELECTRIC,
- UNIVERSAL ROBOTS,
- STÄUBLI,
- DENSO,
- KUKA,
- v budoucnu i ABB.
- Chapadla a nástroje výrobců:
- SCHUNK,
- SCHMALZ,
- ONROBOT,
- WEISS,
- ROBOTIQ,
- ETA-OPT.
- Kamerové systémy pro roboty: Sick a COGNEX.

Nabídky předpřipravených kitů by se měla dále rozšiřovat, nicméně, jak již bylo napsáno, lze použít standardní prvky a systém AIRSKIN aplikovat i na roboty a chapadla jiných výrobců, například FANUC, OMRON, ABB, apod. Navíc výrobce uvádí, že s využitím technologie 3D tisku je schopen vyrobit snímací plochy i na míru téměř jakémukoliv povrchu.
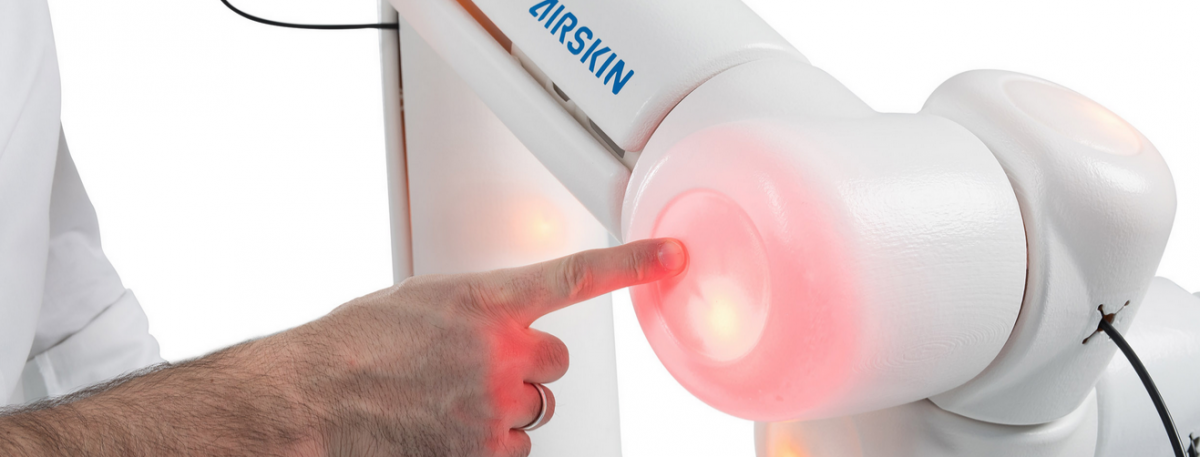 Standardní barevné provedení systému AIRSKIN je bílá / šedá, ale výrobce uvádí, že na přání lze vytvořit v libovolném RAL barevném provedení. K dispozici je i prvek barevné indikace stavu snímání / detekce pomocí efektního i praktického LED prosvětlení snímacího povrchu.
Standardní barevné provedení systému AIRSKIN je bílá / šedá, ale výrobce uvádí, že na přání lze vytvořit v libovolném RAL barevném provedení. K dispozici je i prvek barevné indikace stavu snímání / detekce pomocí efektního i praktického LED prosvětlení snímacího povrchu.
Závěr
 Systém AIRSKIN sám osobě principiálně nepřináší nic nového, protože "jen" kopíruje a aplikuje na robotické systémy jen to, co již dříve příroda vytvořila u svých živočichů / lidí. Ale z pohledu robotizace to může být již velký krok k opravdové spolupráci mezi roboty a lidmi, protože roboti se postupně budou stávat více a více "vnímavý" na chování lidí. Po doplnění robotů o rozeznávání gest nebo rozeznávání řeči či případně i celou hlasovou komunikaci, může být, dle mého názoru, již spolupráce lidí a robotů velmi efektní i efektivní.
Systém AIRSKIN sám osobě principiálně nepřináší nic nového, protože "jen" kopíruje a aplikuje na robotické systémy jen to, co již dříve příroda vytvořila u svých živočichů / lidí. Ale z pohledu robotizace to může být již velký krok k opravdové spolupráci mezi roboty a lidmi, protože roboti se postupně budou stávat více a více "vnímavý" na chování lidí. Po doplnění robotů o rozeznávání gest nebo rozeznávání řeči či případně i celou hlasovou komunikaci, může být, dle mého názoru, již spolupráce lidí a robotů velmi efektní i efektivní.
Bez aplikace dokonalejších snímacích prostředků na straně robotů, je možné kolaborativní režim zatím využívat stále spíše jen jako pracovní nástroj (něco jako chytrou pinzetu či kleště) nebo případně jen jako více-méně samostatný stroj pro pomalé činnosti, který jen nevyžaduje tak důsledné vymezení pracovního prostoru.
 Aktuálně můžete všechny novinky z oblasti robotizace a její aplikace vidět na probíhajícím veletru MSV 2019 na BVV Brno.
Aktuálně můžete všechny novinky z oblasti robotizace a její aplikace vidět na probíhajícím veletru MSV 2019 na BVV Brno.
Mezinárodní strojírenský veletrh je nejvýznamnější průmyslový veletrh ve střední Evropě, s každoroční účastí více než 1 600 vystavovatelů a 80 000 návštěvníků. Ze zahraničí přijíždí přes 50% vystavovatelů a 10% návštěvníků. Hlavním tématem MSV je Průmysl 4.0 a digitální továrna, tedy digitalizace výroby, jeden z hlavních směrů inovačního procesu. V roce 2019 se MSV zaměří také na investiční příležitosti, tedy Start up projekty, nové nápady, inovaci jako příležitost k investicím. https://www.bvv.cz/msv/msv-2019.
Odkazy:
- Webové stránky výrobce Blue Danube Robotics GmbH o systému AIRSKIN: https://www.bluedanuberobotics.com/airskin/
- Webové stránky oficiální českého zastoupení - společnosti ALTEG Bohemia Poděbrady: http://alteg.eu/



