Kolaborativní robot z pohledu bezpečnostních norem
 Jako kolaborativní robotika se označují automaticky ovládané robotické systémy sdílející stejný pracovní prostor s lidmi. Nicméně tento pojem se v praxi vztahuje spíše na systém nebo aplikaci než na určitý typ nebo značku robota. Jde zde o to, že samotný výrobce robota nemůže nikdy předem definovat bezpečnost jeho funkce vzhledem k lidem, pokud nezná konkrétní nástroj, kterým bude nakonec každý konkrétní robot vybaven, a aplikaci, kterou bude daný konkrétní robot vykonávat.
Jako kolaborativní robotika se označují automaticky ovládané robotické systémy sdílející stejný pracovní prostor s lidmi. Nicméně tento pojem se v praxi vztahuje spíše na systém nebo aplikaci než na určitý typ nebo značku robota. Jde zde o to, že samotný výrobce robota nemůže nikdy předem definovat bezpečnost jeho funkce vzhledem k lidem, pokud nezná konkrétní nástroj, kterým bude nakonec každý konkrétní robot vybaven, a aplikaci, kterou bude daný konkrétní robot vykonávat.
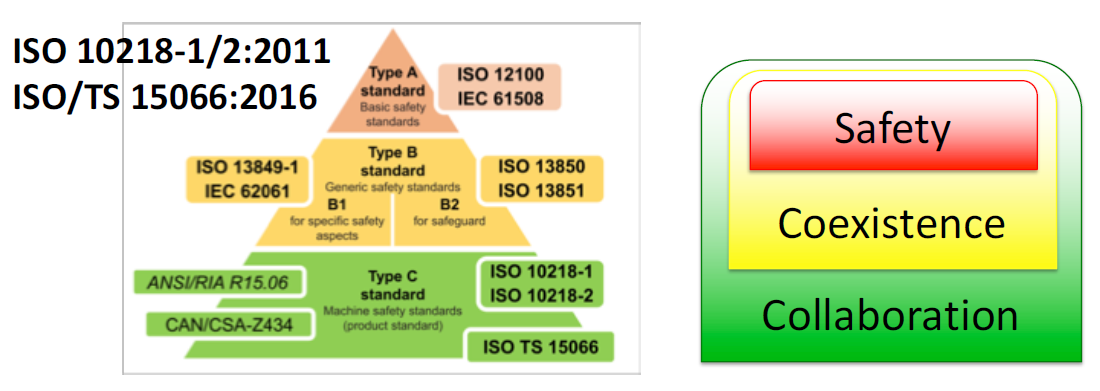
Standardně sériově vyrábění průmysloví roboti v sobě nezahrnují tzv. „koncový efektor“ (end-efektor), tj. zařízení na konci robotického ramene, které interaguje s prostředím během práce robota. Proto jsou průmyslové robotické systémy obvykle raději odděleny od lidí, aby je chránily před zraněním. Prostě je to z bezpečnostního pohledu nejjednodušší a nejspolehlivější řešení. S novými technologickými pokroky však již několik let rychle roste potenciál bezpečně přiblížit sílu a preciznost robotů spolu s tvůrčími schopnostmi lidí. Motivací je zde hlavně dramatické zvýšení produktivity práce. Z tohoto důvodu v roce 2016 vznikla technická specifikace ISO / TS 15066, jako doplněk průmyslových "robotických" norem ISO 10218-1 a ISO 10218-2, definující možnosti a rizika kolaborativní práce s roboty a stanovuje limity, při kterých je ještě kooperace dostatečně bezpečná.
Proč vznikla technická specifikace ISO / TS 15066?
 Specifikace ISO / TS 15066 vznikla jako reakce diskuze při práci na normách pro bezpečnost průmyslových robotů ISO 10218-1 a ISO 10218-2, že pokud aplikace nemůže zranit člověka, tak proč nedovolit jejich vzájemný kontakt robotů s lidmi? Prvním výsledkem byl standard ISO 10218, který sice pojednávající o čtyřech možných technikách spolupráce, ale kolaborativním robotům je věnováno jen 8 stran z celkových 152 stran.
Specifikace ISO / TS 15066 vznikla jako reakce diskuze při práci na normách pro bezpečnost průmyslových robotů ISO 10218-1 a ISO 10218-2, že pokud aplikace nemůže zranit člověka, tak proč nedovolit jejich vzájemný kontakt robotů s lidmi? Prvním výsledkem byl standard ISO 10218, který sice pojednávající o čtyřech možných technikách spolupráce, ale kolaborativním robotům je věnováno jen 8 stran z celkových 152 stran.
Proto následně vznikala specifikace ISO / TS 15066, která začala myšlenkou, že pokud by došlo k náhodnému kontaktu mezi člověkem a strojem, nesmí to mít za následek bolest nebo zranění. Když roboti pracují vedle lidí, musíme být velmi opatrní, aby aplikace neohrozila člověka. Před ISO / TS 15066 měli dodavatelé a integrátoři robotických systémů pouze obecné informace o požadavcích na systémy spolupráce. ISO / TS 15066 naopak poskytuje specifické bezpečnostní pokyny, které jsou založeny na konkrétních údajích a které jsou nezbytné pro hodnocení a kontrolu rizik.
ISO / TS 15566 není přímo norma, ale "jen" technická specifikace doplňující "robotické" normy ISO 10218-1 / ISO 10218-2 pro kolaborativní režimy robotických systémů.
Co říká ISO / TS 15066 ?
Ve spolupráci robotiky mohou lidé a robotická zařízení mít překrývající se pracovní prostor, kde oba plní úkoly. ISO / TS 15066 ma odpovídá na konkrétní otázky, které zůstali nezodpovězené v normě ISO 10218, hlavně pokud jde o kontakt robota s člověkem, a poskytuje pokyny pro návrh a implementaci pracovního prostoru, který snižuje rizika pro lidi. A to i pro případy, kdy se robotický systém nepohybuje, ale může do něj člověk teoreticky narazit. Proto pracovní skupina se tím zabývala i tím, že vyžadovala, aby byly ostré hrany a výčnělky minimalizovány pro celý systém, včetně související vybavení, tak, aby případný náraz nebo pád na robotický systém neměl horší následky, než běžné pády na zem či náraz do zdi.
ISO / TS 15066 z pohledu konstrukce a použití kolaborativních robotů specifikuje:
 Důležité vlastnosti bezpečnostních řídicích systémů.
Důležité vlastnosti bezpečnostních řídicích systémů.- Faktory, které je třeba brát v úvahu při návrhu spolupracujících robotických systémů.
- Vestavěné bezpečnostní systémy a jejich efektivní využití.
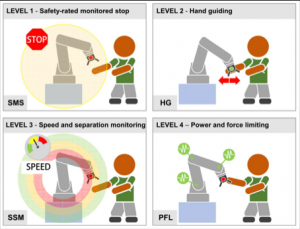
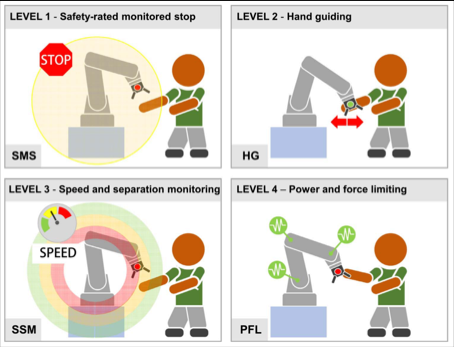
- Pokyny pro implementaci následujících technik spolupráce:
- bezpečnostní monitorované zastavení (LEVEL 1 - SMS),
- možnost ručního vedení (LEVEL 2 - HG),
- monitorování rychlosti a odstupu (LEVEL 3 - SSM),
- omezení výkonu a síly / momentu (LEVEL 4 - PFL).
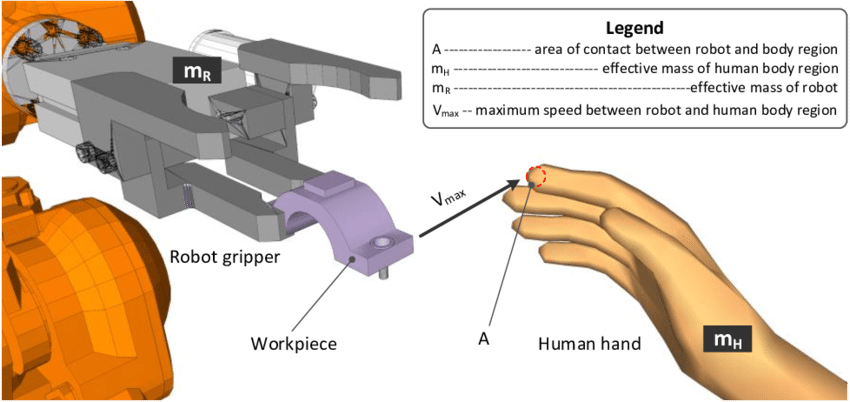 Při implementaci robotů dle ISO / TS 15066 nemusí být použity tradiční ochranné kryty a ochranná zařízení, která udržují lidi a systémy robotů trvale odděleny, pro aplikace s omezeným výkonem a silou implementované v souladu s ISO 10218-1 a ISO 10218-2. Technická specifikace pro tyto řešení obsahuje údaje ze studie o prazích bolesti různých částí lidského těla, které mohou být použity pro vhodný návrh a provedení robotických aplikací nebo pro analýzu bezpečnostních rizik při fyzickém kontaktu.
Při implementaci robotů dle ISO / TS 15066 nemusí být použity tradiční ochranné kryty a ochranná zařízení, která udržují lidi a systémy robotů trvale odděleny, pro aplikace s omezeným výkonem a silou implementované v souladu s ISO 10218-1 a ISO 10218-2. Technická specifikace pro tyto řešení obsahuje údaje ze studie o prazích bolesti různých částí lidského těla, které mohou být použity pro vhodný návrh a provedení robotických aplikací nebo pro analýzu bezpečnostních rizik při fyzickém kontaktu.

Úrovně nebezpečí poranění zásahem robota pro různé části lidského těla (zelená = nízká, světle žlutá = střední, tmavě žlutá = vysoké, červená = velmi vysoká).
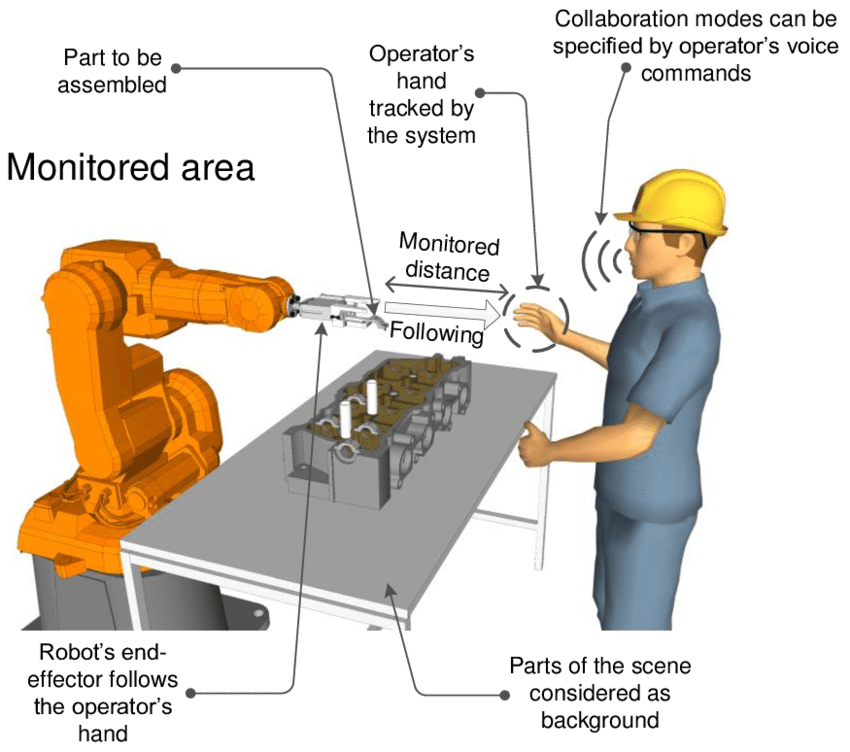 Další nabízený způsob, jak lze realizovat spolupráci lidí a robotů, je monitorování rychlosti a odstupu. V takových systémech je udržována minimální bezpečná vzdálenost mezi robotickým systémem a osobou, aby se přímému fyzickému kontaktu zabránilo. V mnoha aplikacích, kde má něco robot předat lidské obsluze nemusí být nutné, aby ji to dával přímo do ruky, ale může se pro vzájemnou interakci například po užít definovat odkládací / předávací místo, kam robot předmět položí a lidská obsluha zase převezme. Takový robotický systém pak neustále detekuje ("vnímá") pozici člověka a v případě jeho příliš velkému přiblížení prostě uhne (například ramenem) na jinou stranu, než na kterou směřuje lidská ruka, nebo když člověk uděláte krok vpřed, robotický systém se posune o krok zpět. Toto řešení se někdy označuje jako "tanec". Technická specifikace poskytuje podrobné pokyny pro maximální povolené rychlosti a minimální odstupy. Zvýšení rychlosti a zmenšení odstupu pak může být realizován pokroky v technologii ochranných zařízení, stejně jako ve vývoji materiálů pro změkčení fyzického kontaktu, přesnějšími a spolehlivějšími senzory, lepším řízení pohybu a dalšími inovacemi.
Další nabízený způsob, jak lze realizovat spolupráci lidí a robotů, je monitorování rychlosti a odstupu. V takových systémech je udržována minimální bezpečná vzdálenost mezi robotickým systémem a osobou, aby se přímému fyzickému kontaktu zabránilo. V mnoha aplikacích, kde má něco robot předat lidské obsluze nemusí být nutné, aby ji to dával přímo do ruky, ale může se pro vzájemnou interakci například po užít definovat odkládací / předávací místo, kam robot předmět položí a lidská obsluha zase převezme. Takový robotický systém pak neustále detekuje ("vnímá") pozici člověka a v případě jeho příliš velkému přiblížení prostě uhne (například ramenem) na jinou stranu, než na kterou směřuje lidská ruka, nebo když člověk uděláte krok vpřed, robotický systém se posune o krok zpět. Toto řešení se někdy označuje jako "tanec". Technická specifikace poskytuje podrobné pokyny pro maximální povolené rychlosti a minimální odstupy. Zvýšení rychlosti a zmenšení odstupu pak může být realizován pokroky v technologii ochranných zařízení, stejně jako ve vývoji materiálů pro změkčení fyzického kontaktu, přesnějšími a spolehlivějšími senzory, lepším řízení pohybu a dalšími inovacemi.
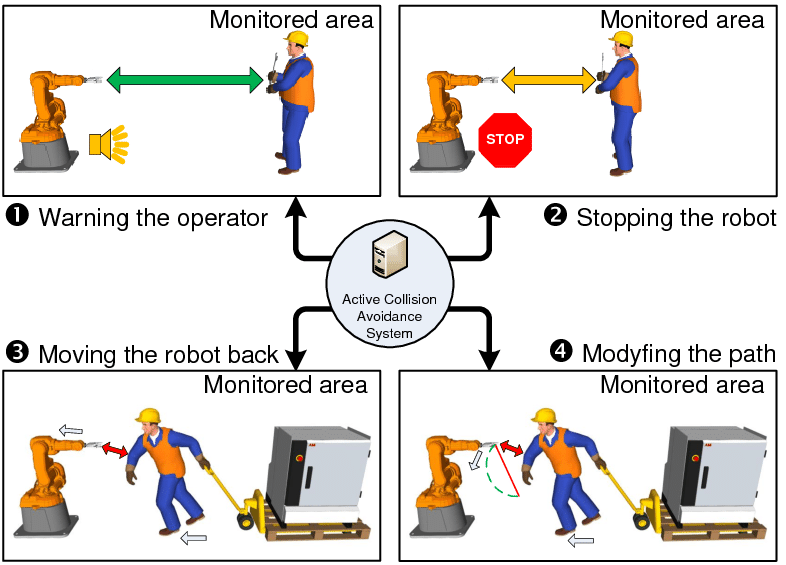
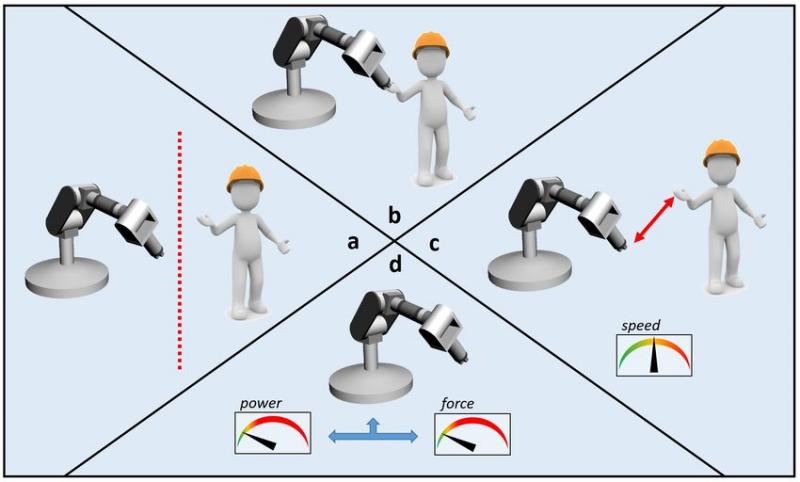
Základní možnosti řešení kolize kolaborativních robotů s člověkem - zleva nahoře: varování, zastavení, odsunutí ramene, změna směru pohybu.
Bezpečnost kolaborativních robotů z praktického pohledu
Když přiblížíme problematiku bezpečné spolupráce robotů a lidí uvedené ve výše zmíněné specifikaci ISO / TS 15066 a normy ISO 1021 více z praktického pohledu, tak v zásadě vždy jde o to, aby vždy vzájemný kontakt robota a člověka byl ze strany robota spolehlivě omezen jen na takové silové působení, které nemůže člověka poranit.
 Pokud robot není v žádném blízkém kontaktu či dosahu člověka, může klidně pracovat i maximální svojí konstrukční rychlostí a silou, podobně jako klasický průmyslový robot v bezpečnostním oplocení, ale v okamžiku, kdy se v jeho dosahu (dosahu robotické ruku, resp. přesněji řečeno produktu přenášeného v robotické ruce) nachází nějaký člověk, musí svoji činnost zpomalit či omezit svoje pohyby tím více, čím je člověk blíže. Jde však o to, že omezení pohybu, rychlostí a síly robota nelze striktně nadefinovat u výrobce robota, ale primárně to závisí na aplikaci, kterou bude robot nakonec v provozu konkrétně zastávat.
Pokud robot není v žádném blízkém kontaktu či dosahu člověka, může klidně pracovat i maximální svojí konstrukční rychlostí a silou, podobně jako klasický průmyslový robot v bezpečnostním oplocení, ale v okamžiku, kdy se v jeho dosahu (dosahu robotické ruku, resp. přesněji řečeno produktu přenášeného v robotické ruce) nachází nějaký člověk, musí svoji činnost zpomalit či omezit svoje pohyby tím více, čím je člověk blíže. Jde však o to, že omezení pohybu, rychlostí a síly robota nelze striktně nadefinovat u výrobce robota, ale primárně to závisí na aplikaci, kterou bude robot nakonec v provozu konkrétně zastávat.
Tedy i v případě použití certifikovaného kolaborativního robota se musí provádět analýza rizik aplikace dle normy ISO 13849 jako u kteréhokoliv jiné i nerobotické aplikace.
Například klidně může být použit pro práci s lidmi schválený kolaborativní robot, ale když jeho pracovní nástroj bude ostrý špičatý obráběcí nástroj, nějaký řezací nůž, nebo když sám o sobě přenášený předmět bude velmi těžký nebo s velmi ostrými hranami, musí být bezpečností systém robota nastaven tak, aby vždy stoprocentně zastavil, když se člověk objeví v oblasti či v trajektorii plánovaného pohybu, tedy podobná opatření jako o "klasických" průmyslových nekolaborativních robotů.

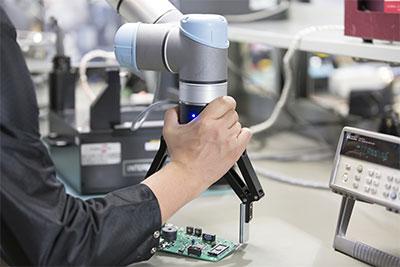
Moderní kolaborativní roboti, jako zde například Omron TM, mají již implementované bezpečnostní přepínání mezi kolaborativním pomalým a nekolaborativním rychlým režimem v závislosti na tom, zda může nebo nemůže dojít ke kontaktu s člověkem.
Dnes totiž moderní i rozměrově malý roboti certifikovaní pro kolaborativní režim umí dosáhnout velmi vysokých rychlostí pohybu i zdvihacích či přítlačných sil ve všech svých osách. Pro efektivní využití takového robota je tedy dobré jej střídavě provozovat ve dvou přepínaných režimech:
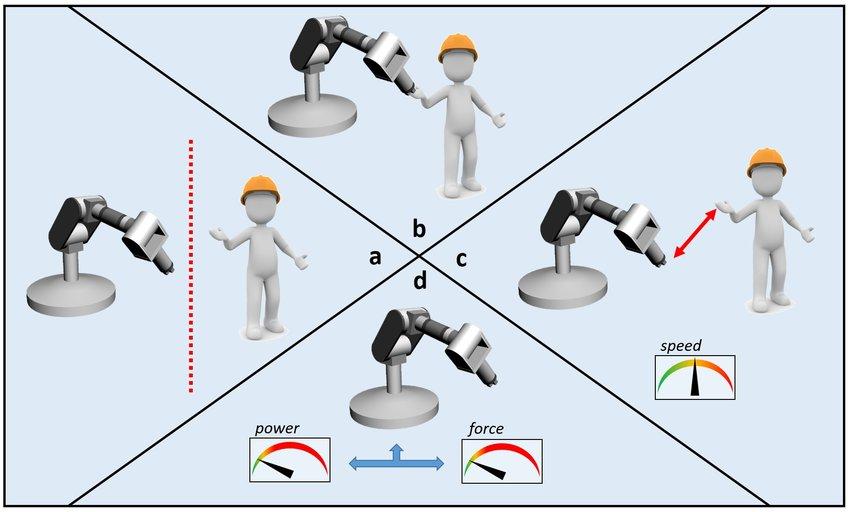
 V režimu maximální možné provozní rychlosti a síly (obr. a), které umožňuje daná aplikace a parametry robota v situacích, kdy přístup člověka / kontakt s člověkem je provozně vyloučen.
V režimu maximální možné provozní rychlosti a síly (obr. a), které umožňuje daná aplikace a parametry robota v situacích, kdy přístup člověka / kontakt s člověkem je provozně vyloučen.- V kolaborativním režimu s omezenou rychlostí pohybu a silovým působením nebo sledováním odstupu (obr. b / c / d) v situacích, kdy má dojít k blízkému kontaktu s člověkem (např. předání předmětu) nebo kdy hrozí neplánovaný kontakt s člověkem (např. člověk omylem vstoupí do cesty / do trajektorie pohybu robota).
Moderní kolaborativní roboti, jako například roboti Omron řady TM, již mají toto přepínání režimu i ostatní "žluté" průmyslové bezpečnostní funkce bezpečnostního PLC přímo implementovány ve svém firmwaru a již mají od výrobce přednastavené limitní hodnoty pro různé situace, které lze případně s ohledem na aplikaci ještě zpřísnit, a které se následně jen aktivují například reakcí bezpečnostního skeneru, bezpečností optozávory, bezpečnostním dveřním spínačem či rohoží apod.
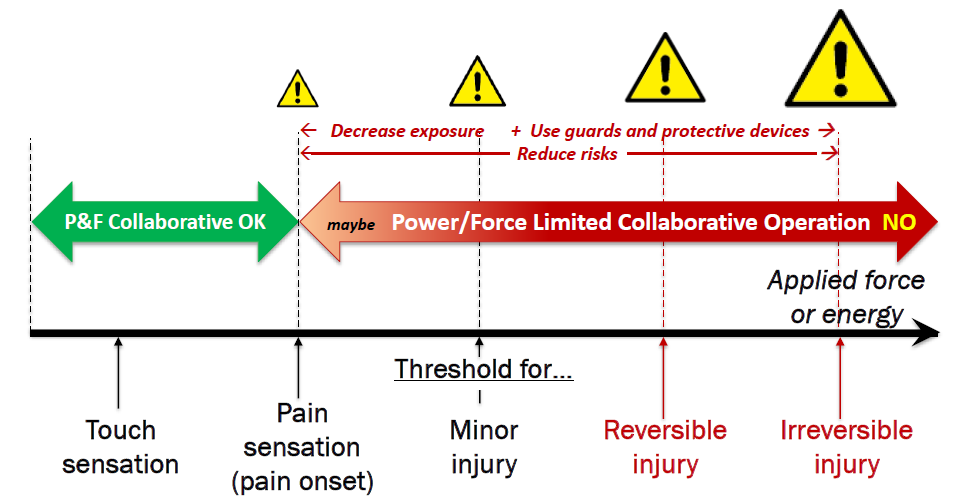
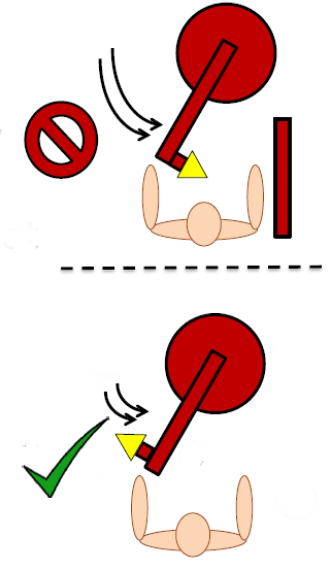
Základní rozhodovací strategie, kdy lze použít kolaborativní režim. Pokud zásah robotem nebo jím používaným nástrojem může vyvolat jen citlivost na dotek (Touch sensation) nebo jen bolest bez poranění (Pain Sensation), je kolaborativní režim bezproblémový. Pokud zásah může způsobit nejvýše lehké zranění (Minor injury) nebo v nejhorším případě vratné zranění (Reversible injury) je možné ještě o něm uvažovat při použití vhodných ochranných prostředků. Pokud hrozí nevratné zranění (Irreversible injury), tak se kolaborativní režim nemůže použít.
Například je přímo provozně vhodné nebo i přímo nutné i kolaborativního robota v některých případech obestavět mechanickými zábranami (např. ochrannou klecí), například tam, kde něco obrábí, stříhá nebo lisuje, a kde vlivem zamezeného neočekávaného přístupu člověka může rychle pracovat s ostrými předměty nebo se velmi rychle pohybovat bez nutnosti kontrolovat výstup svých silových a momentových senzorů. V tomto režimu tak kolaborativního robota lze využívat stejně efektivně jako klasického průmyslového robota. Nicméně v momentě kdy například má obrobený výrobek předat do rukou lidské obsluhy, vysune rameno tvorem v kleci ven mimo ni a automaticky se přepne do pomalého kolaborativního režimu, kdy bude pečlivě sledovat momenty a zatížení svých bezpečnostních senzorů, aby přílišným tlakem na ruku operátora či případně s jinou částí jeho těla, pokud se operátor nějak "blbě" natočí či postaví, mu nezpůsobil zranění. Výsledkem tohoto řešení je tedy současná maximalizace rychlosti funkce robota tam kde to jde a současně dostatečné zajištění bezpečnosti při spolupráci s lidmi.
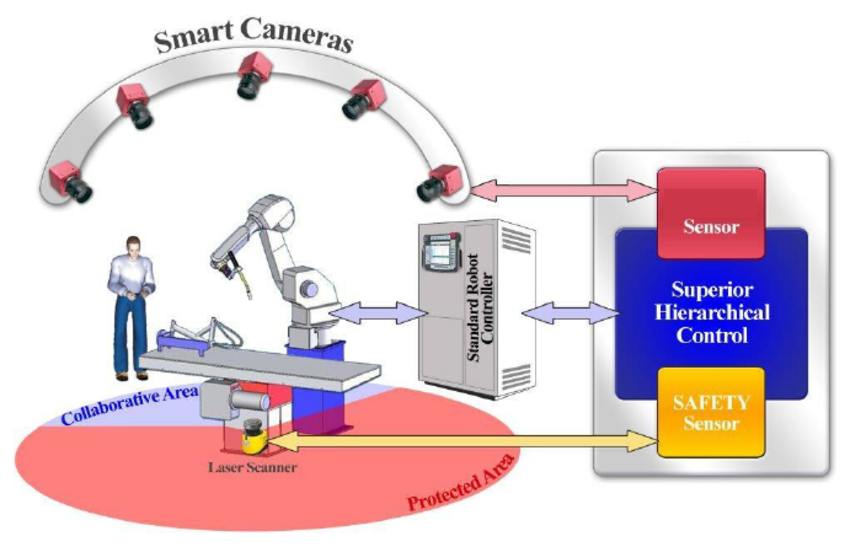
Práce moderního kolaborativního robota lze rozdělit do režimu maximálního výkonu, když se nachází v chráněné oblasti (Protected Area) a kolaborativního režimu s omezeným výkonem v oblasti interakce s člověkem. Pro správné přepnutí režimu je však nutné celou aplikace vybavit vhodnými bezpečnostními monitorovacími prostředky.
Závěr
V tomto článku jsem chtěl primárně naznačit, že byť jsou kolaborativní roboti určeny i pro provoz v kooperaci s lidmi, tak nelze tuto funkci použít ve všech případech a každá taková realizace aplikace vyžaduje důkladné posouzení bezpečnostních rizik. Pokud robot, byť kolaborativní, pracuje s velmi ostrými nástroji, využívá svém pracovní procesu velkých sil a momentů, nelze v takové aplikaci nebo v momentě, kdy takto nebezpečné nástroje robot používá, dovolit jeho přímý kontakt s lidmi, ale je nutné zajistit dostatečný minimální odstup a při jeho porušení musí robot na to adekvátně zareagovat. Buď vhodnou změnou směru pohybu nebo zcela zastavením. Za tyto řešení situací však nemůže nést odpovědnost výrobce robota, ale až finální integrátor / programátor jeho aplikační funkce, který by měl využít poznatků uvedených v technické specifikaci ISO / TS 15066 jako základního odrazového můstku.
Odkazy:
- Technická specifikace ISO / TS 15066: 2016, Roboty a robotická zařízení - https://www.iso.org/standard/62996.html
- Mike Beaupre: "Collaborative Robot Technology and Applications", KUKA Robotics - https://www.robotics.org/userAssets/riaUploads/file/4-KUKA_Beaupre.pdf
- Roberta Nelson Shea: "ISO/TS 15066 Introduction" - http://www.robotics.org/filesDownload.cfm?dl4=4_ISO-TS%2015066%20Introduction.pdf
- Alessandro De Luca: "Control schemes for safe human-robot interaction", Istituto Italiano di Tecnologia - http://www.diag.uniroma1.it/deluca/IIT_Seminar_Jan23_2019_ADL.pdf



