 Co je BionicCobot?
Co je BionicCobot?
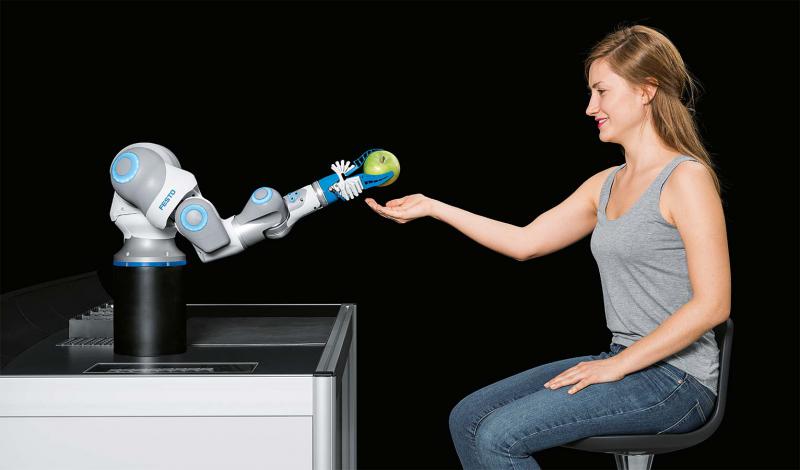
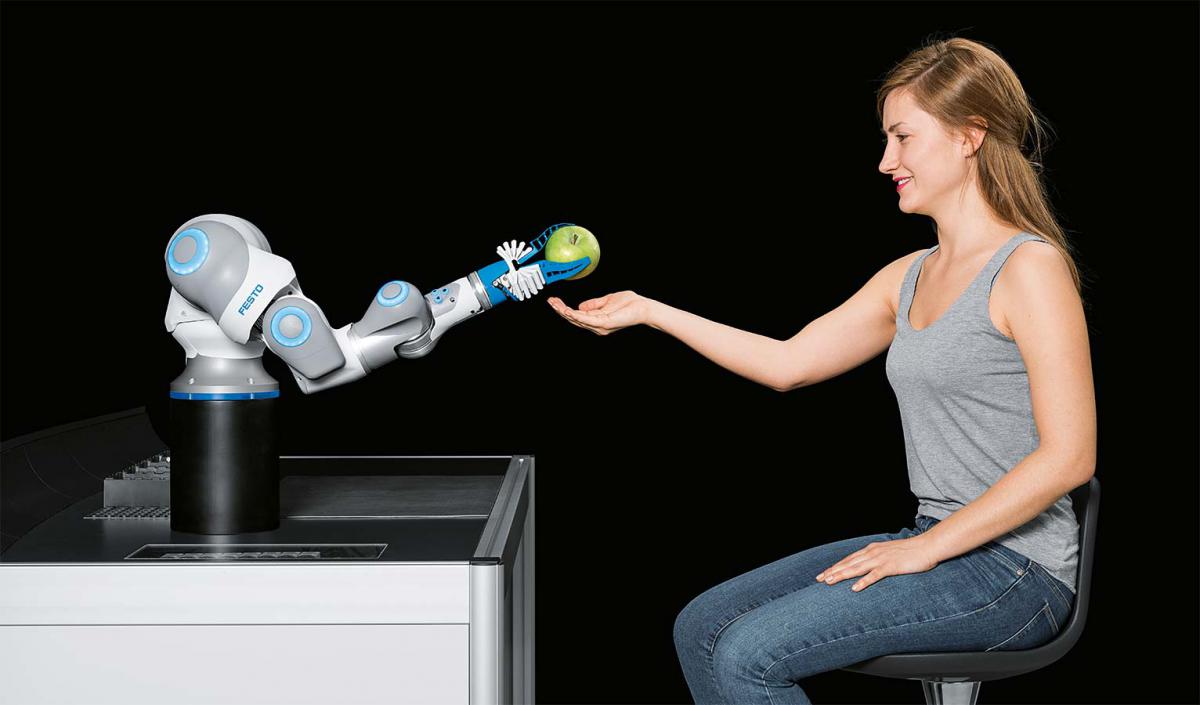
BionicCobot, který je ve vývoji německé společnosti Festo, je primárně navržený a vyvíjený tak, aby se stal citlivým pomocníkem umožňujícím přímou bezproblémovou spolupráci člověk-robot. Také obecné označení Cobot je zkratka z anglického "collaborative robot" (překl. spolupracující robot), což znamená, že takové zařízení může pracovat v přímém kontaktu s člověkem bez rizika vážného zranění.
 BionicCobot, jak se celý projekt nazývá, je lehkým pneumatickým systémem v podobě ramene se 7 osami pohybu, který je založen na principu anatomie lidské ruky. Díky tomu umožňuje provádět a řešit i velmi jemné a citlivé pohybové a uchopovací úkoly, což mimo možnosti manipulace i s velmi jemnými předměty umožňuje i přímou, ale současně i bezpečnou kooperaci s člověkem.
BionicCobot, jak se celý projekt nazývá, je lehkým pneumatickým systémem v podobě ramene se 7 osami pohybu, který je založen na principu anatomie lidské ruky. Díky tomu umožňuje provádět a řešit i velmi jemné a citlivé pohybové a uchopovací úkoly, což mimo možnosti manipulace i s velmi jemnými předměty umožňuje i přímou, ale současně i bezpečnou kooperaci s člověkem.
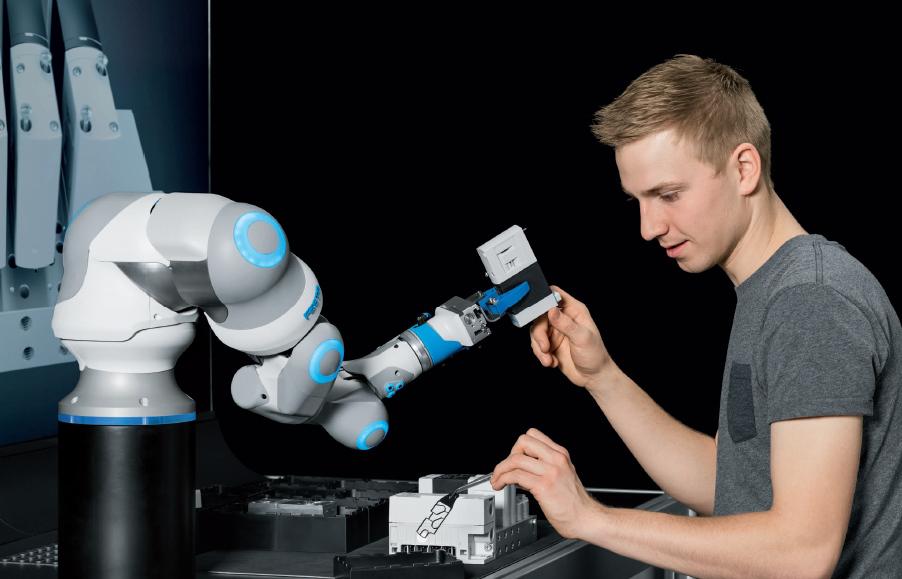
Toho se dá využít všude tam, kde je nutné současně rychle, ale i pečlivě předměty polohovat, nebo pevně, ale ne příliš velkou silou věci stisknout, tedy podobně, jak to provádí naše lidská ruka. Lze jej tak použít nejen samostatně v současných běžných roboty řešených aplikacích, jakými například jsou třídění či ukládání a balení produktů z dopravního pásu do různých obalů, ale současně může pracovat jako přesný a pečlivý montážní robot, který může i přímo asistovat lidskému technikovi jako pomocník (kolega).
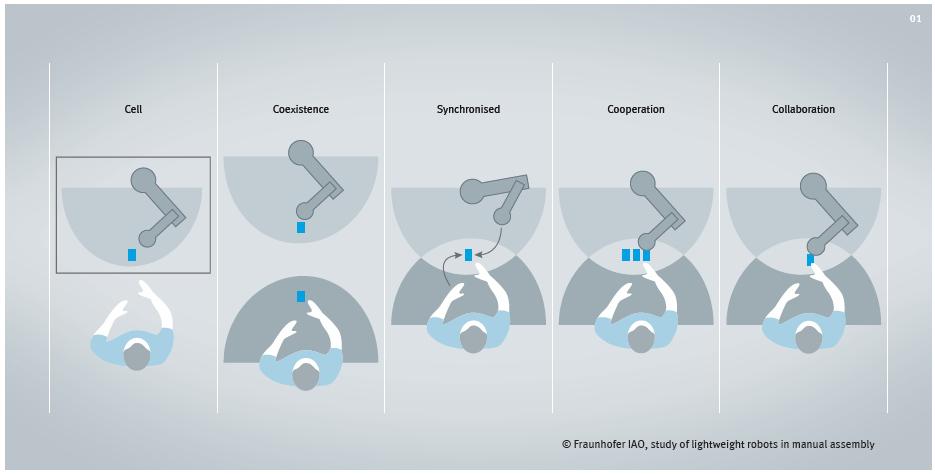
Oficiálně definované třídy definující schopnost robota spolupracovat s lidskou obsluhou - zleva: Cell = nutná samostatná oddělená funkce (standardní průmyslový robot), Coexistence = samostatná, ale neoddělená funkce, Synchronised = střídavá synchronizovaná spolupráce, Cooperation = definovaná kooperace robota a člověka (robot provádí definovanou činnost v kontaktu s člověkem), Collaboration = společná práce robota a člověka (robot reaguje interaktivně na požadavky člověka).
Konstrukce a princip funkce
Jak již bylo zmíněno výše, konstrukce BionicCobota je založena na principu anatomie lidské ruky, aby bylo možné dosáhnout dostatečně silné, ale přesto velmi citlivé a přesné funkce. Vývojáři proto do všech sedmi kloubů BionicCobota implementovali technicky realizovaný "balanční" princip proti sobě působícího mechanismu agonist (hráč) - antagonist (oponent), který je i součástí lidské ruky v podobě systému horního a spodního svalu (biceps-triceps).
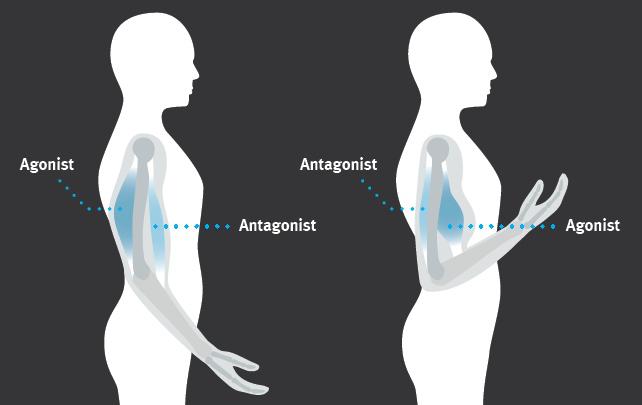
Balanční princip proti sobě působícího mechanismu agonist (hráč) - antagonist (oponent), který je i součástí lidské ruky v podobě systému horního a spodního svalu (biceps-triceps).
 U BionicCobota je tento systém v každém kloubu (pohybové ose) realizován jako dvojice speciálních pneumatický pohonů, každý tvořený speciální rotační lopatkou se dvěma vzduchovými komorami - tzv. Festo DRVS semi-rotary vane drive. Tento systém je nejen velmi výkonný a z pohledu počtu komponent až geniálně jednoduchý, ale tlakovým vzduchem se kloub nejen pohání (tedy zajišťuje jeho otáčení), ale současně také lze různou úrovní naplnění plynule nastavit / stanovit silový potenciál a tím i úroveň tuhosti robota. Podobně jako předepnutím mechanické pružiny. Další výhodou tohoto čistě pneumatického poháněcího systému proti elektrickému je vysoká teplotní odolnost, protože sám pohon žádné přímé teplo v osobě negeneruje.
U BionicCobota je tento systém v každém kloubu (pohybové ose) realizován jako dvojice speciálních pneumatický pohonů, každý tvořený speciální rotační lopatkou se dvěma vzduchovými komorami - tzv. Festo DRVS semi-rotary vane drive. Tento systém je nejen velmi výkonný a z pohledu počtu komponent až geniálně jednoduchý, ale tlakovým vzduchem se kloub nejen pohání (tedy zajišťuje jeho otáčení), ale současně také lze různou úrovní naplnění plynule nastavit / stanovit silový potenciál a tím i úroveň tuhosti robota. Podobně jako předepnutím mechanické pružiny. Další výhodou tohoto čistě pneumatického poháněcího systému proti elektrickému je vysoká teplotní odolnost, protože sám pohon žádné přímé teplo v osobě negeneruje.
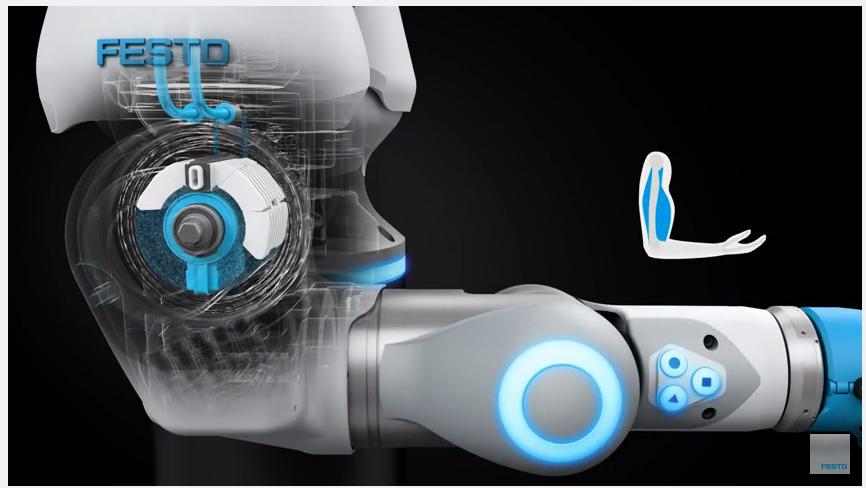

Provedení a princip funkce "DRVS semi-rotary vane drive" pneumatického pohonu každého kloubu prostřednictvím tlakového vzduchu.
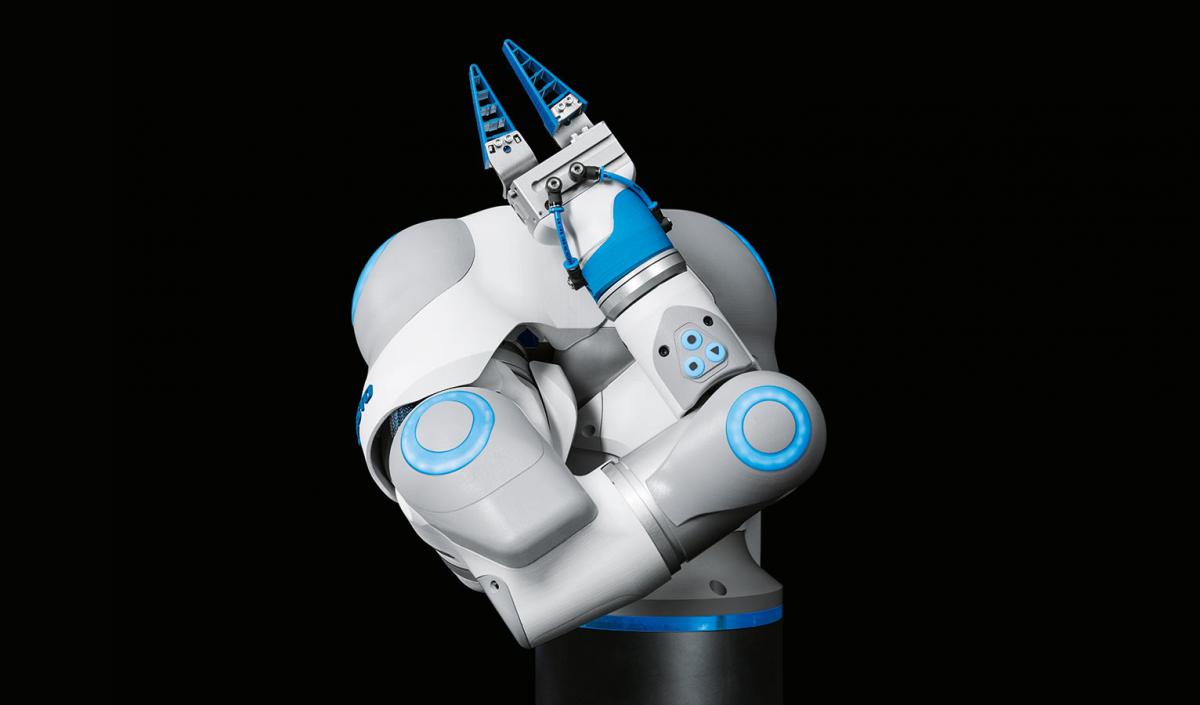
Celkově 7-osý systém tak poskytuje v oblasti ramene 3 pohybové osy (3 osy volnosti), následně pak další osu v lokti a ve spodní části ruky a nakonec dvě osy v zápěstí. Tedy počet pohybových os odpovídá počtu realizovaných kloubů. Celý tento důmyslný systém pak současně zajišťuje rychlou reakci na změnu síly a tlaku při polohovací / poziční přesnosti 1 mm. V případě srážky s jakýmkoliv objektem se pneumatické rameno bleskurychle automaticky uvolní a nepředstavuje tak žádné nebezpečí pro lidi, kteří jsou s ním v přímém kontaktu. Tato přirozená flexibilita systému a nízká hmotnost konstrukce umožňují použití a nasazení do akce bez ochranné klece, což umožňuje okamžitou a bezpečnou spolupráci mezi člověkem a strojem. BionicCobot svojí "pohotovostní" hmotnosti 6 kg zvládne manipulovat s předměty s hmotností až do 1,5 kg. Což vůbec není špatný poměr.
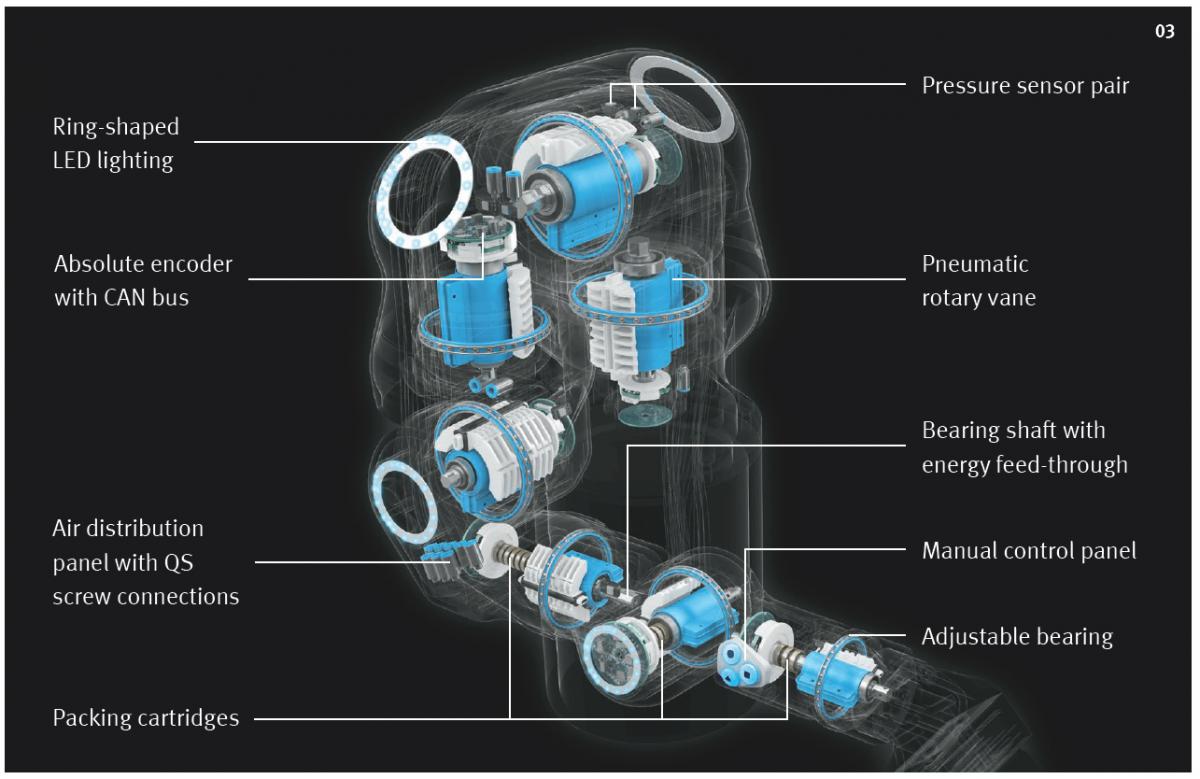
Struktura / konstrukce ramene BionicCobota společnosti Festo.
 Ovládání BionicCobota se provádí intuitivně prostřednictvím grafického uživatelského rozhraní prostřednictvím tabletu, kde uživatel může systém snadno naučit na aplikaci, kterou má BionicCobot vykonávat. Nejdříve se nadefinují jednotlivé pozice a natočení robota, které lze následně libovolně za sebe řadit / řetězit do skupin a nakonec zařadit do celkové pohybové sekvence. Také lze do sekvence vřadit na různá místa různé rozhodovací bloky, čímž je možné naprogramovat různé pohybové reakce robota například na různé signály ze senzorů. Jednotlivé části pohybu nebo následně celý zřetězený proces si lze na tabletu "odsimulovat" v podobě grafické vizualizace. Vše v reálu velmi připomíná úpravu / střih / editaci videa. Tak intuitivně je vytvořené programovací prostředí. Prostřednictvím otevřené platformy ROS (Robot Operating System) se pak programované sekvence pohybů přeloží a přesunou do integrovaného terminálu Festo Motion, který ovládá kinematiku robota.
Ovládání BionicCobota se provádí intuitivně prostřednictvím grafického uživatelského rozhraní prostřednictvím tabletu, kde uživatel může systém snadno naučit na aplikaci, kterou má BionicCobot vykonávat. Nejdříve se nadefinují jednotlivé pozice a natočení robota, které lze následně libovolně za sebe řadit / řetězit do skupin a nakonec zařadit do celkové pohybové sekvence. Také lze do sekvence vřadit na různá místa různé rozhodovací bloky, čímž je možné naprogramovat různé pohybové reakce robota například na různé signály ze senzorů. Jednotlivé části pohybu nebo následně celý zřetězený proces si lze na tabletu "odsimulovat" v podobě grafické vizualizace. Vše v reálu velmi připomíná úpravu / střih / editaci videa. Tak intuitivně je vytvořené programovací prostředí. Prostřednictvím otevřené platformy ROS (Robot Operating System) se pak programované sekvence pohybů přeloží a přesunou do integrovaného terminálu Festo Motion, který ovládá kinematiku robota.
Samotný pohyb ramene pak zjišťuje 16 hadiček rozvodu tlakového vzduchu s 14 senzory tlaku vzduchu a 7 absolutních rotačních enkodérů pro měření natočení, které komunikují s řídící jednotkou Festo Motion Terminal prostřednictvím CAN sběrnice.
Videoprezentace s ukázkou nastavení/učení pohybu
Závěr
BionicCobot představuje velmi zajímavé řešení tzv. Humanica, který má primárně sloužit lidem jako neúnavný kolega. Na základě bezpečné interakce, přirozených pohybových sekvencí a intuitivní operability má BionicCobot velký potenciál v širokém spektru odvětví, obzvláště pokud jde o monotónní, bezduché nebo dokonce nebezpečné činnosti, může být použit jako pomocný robot, který lidem zjednoduší práci.
Odkazy:
- Webové stránky BionicCobot společnosti Festo: https://www.festo.com/group/en/cms/12746.htm
- Přímý odkaz na videoprezentaci BionicCobota: https://www.festo.com/group/en/repo/assets/media/BionicCoBot-making_of-en_SD(405p).mp4
- Článek "Festo - robotika inspirovaná přírodou" na serveru automatizace.hw.cz



