 Každý,
kdo zhruba alespoň tuší, jak harddisk pracuje, mi jistě dá za pravdu, že
magnetické senzory zde hrají klíčovou roli. Realizují totiž čtecí část hlav
harddisků provádějící ukládání a výběr dat z magnetických rotujících disků.
Prakticky tak určují jak rychle bude harddisk pracovat a jakou bude mít
kapacitu. Právě proto, že od uživatelů trvale roste požadavek na kapacitu disku
při stejné či i menší fyzické velikosti, snaží se výrobci neustále zvyšovat hustotu zápisu a tím vyvíjet
menší a menší a přitom citlivější a citlivější harddiskové hlavy, hlavně
jejich čtecí část realizovanou magnetorezistivním senzorem (obecně MR senzor). Pokud
však budete bez vylepšování technologie senzor jen prostě zmenšovat, zjistíte,
že s tím výrazně degraduje je výkonnost. To zde hlavně přestavuje parametr zvaný
SNR (Signal-Noise-Ration), tedy odstup užitečného signálu od šumu.
Každý,
kdo zhruba alespoň tuší, jak harddisk pracuje, mi jistě dá za pravdu, že
magnetické senzory zde hrají klíčovou roli. Realizují totiž čtecí část hlav
harddisků provádějící ukládání a výběr dat z magnetických rotujících disků.
Prakticky tak určují jak rychle bude harddisk pracovat a jakou bude mít
kapacitu. Právě proto, že od uživatelů trvale roste požadavek na kapacitu disku
při stejné či i menší fyzické velikosti, snaží se výrobci neustále zvyšovat hustotu zápisu a tím vyvíjet
menší a menší a přitom citlivější a citlivější harddiskové hlavy, hlavně
jejich čtecí část realizovanou magnetorezistivním senzorem (obecně MR senzor). Pokud
však budete bez vylepšování technologie senzor jen prostě zmenšovat, zjistíte,
že s tím výrazně degraduje je výkonnost. To zde hlavně přestavuje parametr zvaný
SNR (Signal-Noise-Ration), tedy odstup užitečného signálu od šumu.
Obecně čím menší je totiž MR senzor, tím menší dává signál. Od určité úrovně pak je již generovaný signál tak malý, že jej nelze rozeznat od šumu, čímž senzor přestává být prakticky užitečný. V případě čtecí hlavy harddisku, prostě přestává číst, tedy přesněji na výstupu z MR senzoru již nelze rozeznat stav magnetického záznamu na disku, tedy posloupnost bitů. SNR tak můžete prakticky zvýšit jen dvěma způsoby: buď snížit úroveň šumu, který se do senzoru „dostává“ z okolí či zvýšit citlivost senzoru, který bude sám o sobě poskytovat větší výstupní signál. V případě MR senzorů tedy jde o zvýšení změny odporu při působení stejného externího mag. pole.
Čtecí část harddiskové hlavy lze realizovat GMR nebo AMR senzorem.
Troška historie…
 U
harddisků ještě před cca 15 lety se jako magnetorezistivní čtecí senzory využívaly
AMR senzory. O jejich principu jste se mohli dočíst v článku "Integrované
AMR senzory magnetického pole ". V některých článcích se také označují
prostě jen jako MR senzory. Jejich nevýhoda je jen velmi malá reakce na externí
mag. pole, tedy jen velmi málo mění svůj odpor při přechodu z bitu se stavem
„log. 0“ na bit se stavem „log.1“. Typicky změna odporu je jen cca několik procent
(2 – 3 % nominálního odporu senzoru). Navíc musely být relativně velkých rozměrů.
To byl také jeden z důvodů, proč tehdejší kapacity harddisků byly v řádu jen
max. jednotek GB. To znamenalo, že hustota zápisu byl v řádu jednotek Gbitů
na čtvereční palec (Gbits/in2).
U
harddisků ještě před cca 15 lety se jako magnetorezistivní čtecí senzory využívaly
AMR senzory. O jejich principu jste se mohli dočíst v článku "Integrované
AMR senzory magnetického pole ". V některých článcích se také označují
prostě jen jako MR senzory. Jejich nevýhoda je jen velmi malá reakce na externí
mag. pole, tedy jen velmi málo mění svůj odpor při přechodu z bitu se stavem
„log. 0“ na bit se stavem „log.1“. Typicky změna odporu je jen cca několik procent
(2 – 3 % nominálního odporu senzoru). Navíc musely být relativně velkých rozměrů.
To byl také jeden z důvodů, proč tehdejší kapacity harddisků byly v řádu jen
max. jednotek GB. To znamenalo, že hustota zápisu byl v řádu jednotek Gbitů
na čtvereční palec (Gbits/in2).
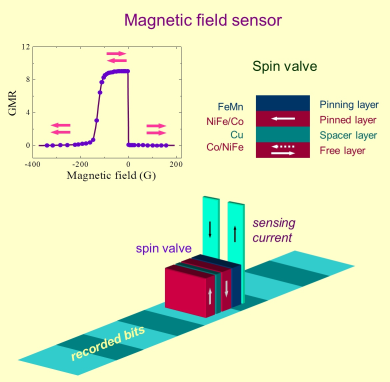
V roce 1997 pak společnost IBM vyvinula první GMR čtecí hlavu, poskytující při výrazně menších rozměrech výrazně větší citlivost, tedy při stejném magnetickém zápisu na disku dávala výrazně silnější signál. Princip GMR jevu a provedení GMR senzoru typu spinový ventil, jste si mohli přečíst v článku "Integrované AMR senzory magnetického pole ". Změna odporu prvních GMR elementů byla prakticky trojnásobná než u předchozích AMR elementů (cca 5 až 8 % nominální hodnoty odporu). Navíc u GMR se do určité úrovně zmenšování struktury vlastnosti ještě vylepšují. Tak se hned v roce 1998 dostala hustota zápisu na hodnoty 2.69 Gbits/in2 a následně po roce 2000 přes hodnotu 35 Gbits/in2, což umožňovalo realizovat harddisky s kapacitou až 200 GB.
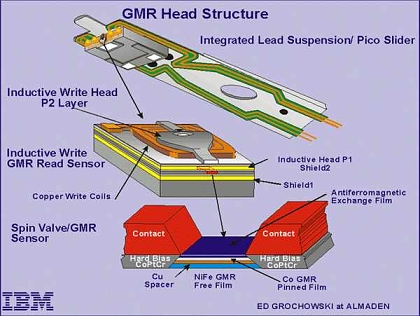
Struktura harddisková hlava a čtecí část vyvinutá IBM v roce 1997.
Jak je ale z tohoto čísla patrné, i tyto hodnoty již byly překonány, což si vyžádalo už i dílčí úpravy samotné GMR technologie a hlavně její lepší spojení v rámci harddiskové hlavy s její zápisovou částí. To se povedlo zavedením technologie vícenásobné antiparalelní struktury GMR spinového ventilu (technologie CPP-GMR). S tím pracují harddisky dnes. Dnešní CPP-GMR senzory dosahují cca 20 – 30% změny jmenovité hodnoty odporu. Navíc tato „vypiplaná“ struktura poskytuje prakticky téměř skokovou změnu odporu a sama o sobě generuje téměř obdélníkový signál.
 V
nejbližší budoucnosti pak bude nutné pro další navyšování kapacit přijít s ještě
lepší technologií než je CPP-GMR. Původně se uvažovalo, že by jí mohl být tzv. TMR jev, tedy tunelový magnetorezistivní jev. Ten již dokonce byl v harddiscích
v posledních letech (2007 až 2009) také nasazován, protože měl lepší parametry
než základní GMR struktura. V současné době se však zatím u něj nedosáhlo parametrů,
které jsou dosažitelné upravenou strukturou CPP-GMR (Pozn. autora: k technologii
TMR se vrátím v některém dalším samostatném článku na serveru automatizace.hw.cz).
V
nejbližší budoucnosti pak bude nutné pro další navyšování kapacit přijít s ještě
lepší technologií než je CPP-GMR. Původně se uvažovalo, že by jí mohl být tzv. TMR jev, tedy tunelový magnetorezistivní jev. Ten již dokonce byl v harddiscích
v posledních letech (2007 až 2009) také nasazován, protože měl lepší parametry
než základní GMR struktura. V současné době se však zatím u něj nedosáhlo parametrů,
které jsou dosažitelné upravenou strukturou CPP-GMR (Pozn. autora: k technologii
TMR se vrátím v některém dalším samostatném článku na serveru automatizace.hw.cz).
Porovnání CPP a CIP struktury GMR senzoru. Zatímco ve starších harddiscích a v současných integrovaných GMR senzorech využívá CIP provedení, v moderních harddiscích již vládne struktura CPP.
Starší GMR čtecí hlavy
 Nejdříve
si ukážeme jak prakticky vypadala čtecí GMR hlava okolo roku 2000. Typická harddisková hlava, která staticky „visí“ těsně nad rotujícím magnetickým diskem,
se včera jako dnes skládá se zápisové a čtecí části. Zápisovou prakticky
tvoří elektromagnet, zatímco čtecí část již zmíněný magnetorezistivní senzor,
dříve tedy AMR a dnes GMR typu spinový ventil (GMR Spine Valve). Původně byl senzor umístěný mezi dvě magnetická stínění. Ta byla potřebná pro eliminaci nežádoucích
okolních magnetických polí, generující v senzoru již zmíněné rušení (šum).
Nejdříve
si ukážeme jak prakticky vypadala čtecí GMR hlava okolo roku 2000. Typická harddisková hlava, která staticky „visí“ těsně nad rotujícím magnetickým diskem,
se včera jako dnes skládá se zápisové a čtecí části. Zápisovou prakticky
tvoří elektromagnet, zatímco čtecí část již zmíněný magnetorezistivní senzor,
dříve tedy AMR a dnes GMR typu spinový ventil (GMR Spine Valve). Původně byl senzor umístěný mezi dvě magnetická stínění. Ta byla potřebná pro eliminaci nežádoucích
okolních magnetických polí, generující v senzoru již zmíněné rušení (šum).
Zatímco zápisová hlava magnetizuje vrstvu magnetického materiálu kotouče disku v „políčkách“, kde má být informace o bitu, následující MR senzor naopak měří stav magnetizace těchto políček (bitů) a podle stupně zmagnetování svojí reakcí definuje stav log. 1 nebo log. 0. Takhle to vypadá jako sranda, jenže problém je například i to, že celá čtecí část hlavy (tedy od jednoho ke druhému stínění) musí mít rozměry max. dvojnásobek délky bitového políčka, resp. velikost samotného MR senzoru musí být max. 1/3 této velikosti. Proto miniaturizace čtecí části hlavy přestavuje tak důležitý parametr. Výhodou plně oddělené čtecí a zápisové hlavy je možnost výrobně nezávisle optimalizovat parametry obou těchto částí.
Základní struktura spojené harddiskové hlavy (Merge head), jak se ještě prakticky využívala před cca 10 a více lety. Místo separátního druhého magnetického stínění čtecí hlavy (Read Element) se pro tento účel využívá přímo jeden pól cívky zápisové hlavy (Inductive Write Element).
I když tloušťka struktury GMR senzoru je jen několik desítek nanometrů, přesto se právě kvůli miniaturizaci rozměrů a tím maximalizaci hustoty zápisu postupem času přešlo na částečně mechanicky i elektricky propojenou strukturu, kdy druhé magnetické stínění zároveň slouží jako jeden pól indukční zápisové části hlavy. Jen například pro hustotu zápisu 10 Gbits/in2 stačil GMR senzor tloušťky 40 nm pro hustotu 40 Gbits/in2 je již nutná hodnota jen max. 20 nm při šířce datové cesty (read track width) okolo 340 nm. Výhoda těchto spojených hlav (Merge heads) mimo menších rozměrů je i levnější výroba a rychlejší odezva, protože vzdálenost mezi čtecí a zápisovou částí je menší.
Funkce „přednatočené“ antiparalelní struktury GMR spinového ventilu pak poskytuje výhodu ve velmi rychlé reakci čtecí hlavy na změnu magnetizace, tedy zde průchod bitového políčka, což mimo jiné také umožnilo realizovat disky s rychlostí otáčení přes 7000 ot./min.
Struktura GMR senzoru čtecí části hlavy, jak se používala ještě do roku cca 2005. Jde o klasické provedení GMR spinového ventilu realizovaného antiparalelní strukturou CIP.
Aktuální harddiskové hlavy
 Pro
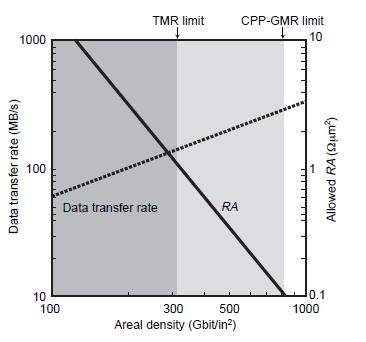
kapacity okolo 1 TB však již i výše uvedená struktura přestává dostačovat. Je
totiž potřeba zajistit hustotu zápisu výrazně přes 300 Gbits/in2 (až 1 Tbits/in2)
při velikosti záznamových cest na disku jen 30 až 50 nm. Proto byla vyvinuta
vylepšená vícevrstvá struktura známá jako CPP-GMR (current perpendicular to
the plane-giant magnetoresistive). Mimochodem se obecně jedná o návrat k původní
struktuře, na které byl celý princip vysvětlen v článku "GMR
senzory mag. pole - 1. díl - princip a struktura". Totiž, že proud
strukturou prochází kolmo na rovinu vrstev.
Pro
kapacity okolo 1 TB však již i výše uvedená struktura přestává dostačovat. Je
totiž potřeba zajistit hustotu zápisu výrazně přes 300 Gbits/in2 (až 1 Tbits/in2)
při velikosti záznamových cest na disku jen 30 až 50 nm. Proto byla vyvinuta
vylepšená vícevrstvá struktura známá jako CPP-GMR (current perpendicular to
the plane-giant magnetoresistive). Mimochodem se obecně jedná o návrat k původní
struktuře, na které byl celý princip vysvětlen v článku "GMR
senzory mag. pole - 1. díl - princip a struktura". Totiž, že proud
strukturou prochází kolmo na rovinu vrstev.
Tato mikrometrová struktura je vytvořená z vícevrstvého střídání stejných nebo dnes častěji různých snímacích feromagnetických a nemagnetických metalických oddělovacích vrstev. Vrstvy jsou velmi tenké (několik nm) a celý senzor může obsahovat od 5 až do 20 vrstev v závislosti na volbě materiálu a požadavku na citlivost (maximalizaci GMR jevu). Jednotlivé vrstvy jsou tak slabé, že již dovolují u každé feromag. vrstvy provést individuální přesné zafixovaní natočení mag. domén a tím vytvořit malé antiparalelní struktury mezi jednotlivými vrstvami vícevrstvé struktury. Velkou výhodou této struktury je velmi rychlá a prakticky skoková reakce na změnu mag. pole, a tedy již obdélníkový výstupní napěťový signál ze senzoru. Tím se mohou bity rychleji střídat a tím zvýšit hustotu zápisu či rychlost čtení.
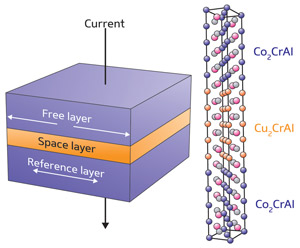 Celková
tloušťka takového vylepšeného senzoru pak s ohledem na malou délku bitu při
velké hustotě zápisu (malou bitovou plošku na disku) však musí být jen v řádu
několika desítek nanometrů. Jako feromagnetické materiály se například vyžívají
sloučeniny Co2CrSi nebo Co2CrAl. a pro oddělovací nemagnetické vrstvy pak například
slitina mědi a hliníku Cu2CrAl.
Celková
tloušťka takového vylepšeného senzoru pak s ohledem na malou délku bitu při
velké hustotě zápisu (malou bitovou plošku na disku) však musí být jen v řádu
několika desítek nanometrů. Jako feromagnetické materiály se například vyžívají
sloučeniny Co2CrSi nebo Co2CrAl. a pro oddělovací nemagnetické vrstvy pak například
slitina mědi a hliníku Cu2CrAl.
Další výhodou CPP-GMR struktury je požadovaný nízký jmenovitý odpor (v řádu desetin Ohmu na čtvereční mikrometr) a možnost odstranění realizace samostatného magnetického stínění. Senzor se totiž dá umístit přímo mezi póly zápisové cívky, které tak zároveň pracují jako stínění senzoru a zároveň jako přívodní vodiče senzoru. Tím se čtecí a zápisová část hlavy prakticky stává kompaktní hlavou. To nejen umožňuje realizovat větší hustotu zápisu a tedy vyšší kapacitu harddisků při stejných rozměrech, ale také snižuje náklady na výrobu.
Struktura CPP-GMR pak tedy stojí za dnešní nízkou cenou a přesto vysokou kapacitů moderních harddisků. Aktuálním lídrem v této oblasti je společnost Hitachi.
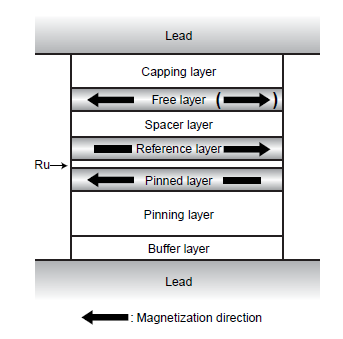
Současná moderní vícevrstvá struktura CPP-GMR čtecího senzoru, která umožňuje realizovat kapacity přes 1 TB. Také je již integrován přímo do prostoru zápisové cívky, čímž se z harddiskové hlavy vytvořil jeden kompaktní celek.
Závěr
Jak je z článku patrné, GMR senzory a jejich vylepšené varianty mají stále co přinést a ještě dost dlouhou dobu budou mít výrazné uplatnění v senzorové technice a hlavách harddisků. Již teď však vědci hledají jejich náhradu, aby nebyla přetržena niť vývoje. Bude to TMR? Či úplně něco jiného?
Článek vytvořil z podkladů výrobců: Antonín Vojáček
DOWNLOAD & Odkazy
- Video ukázky principu a funkce GMR senzoru - www.aldebaran.cz/animace/Phy_gmr.mpg, www.nve.com/GMR-video.php
- Další zajímavé odkazy na stránky o GMR jevu a senzorech:
- www.research.a-star.edu.sg/research/6123
- http://medusa.pha.jhu.edu/research/multiwire.html
- http://news.cnet.com/To-advance-drives,-Hitachi-changes-the-head/2100-1041_3-6213386.html
- www.research.ibm.com/research/demos/gmr/cyberdemo1.htm
- www.research.ibm.com/research/demos/gmr/cyberdemo3.htm
- https://www1.hitachigst.com/hdd/technolo/gmr/gmr.htm
- www.ece.nus.edu.sg/isml/ResearchArea.htm
- První díl článku o GMR senzorech na stránkách automatizace - GMR senzory mag. pole - 1. díl - princip a struktura
- Druhý díl článku o GMR senzorech na stránkách automatizace - GMR senzory mag. pole - 2. díl - vyráběné senzory
- Článek o AMR senzorech na stránkách automatizace - Integrované AMR senzory magnetického pole
- Další články a testy o snímačích, PLC, komponentech nejen pro průmyslové aplikace najdete na stránkách serveru automatizace.HW.cz



