V minulém díle jsme si ukázali obecný princip a strukturu tzv. GMR jevu a senzorů - 1. díl - princip a struktura. Dnes si stručně ukážeme několik reálných zajímavých integrovaných GMR senzorů několika výrobců, které jsou na trhu volně dostupné.
Obecně provedení GMR senzorů
 GMR
senzory jsou na základě svojí funkční struktury vždy vyráběny a nabízeny jako
miniaturní integrované součástky, které pak samozřejmě další producenti např.
průmyslových systému mohou zakomponovat do nějakého většího zařízení. My zde
však půjdeme až ke zdroji a tedy se podíváme přímo na ona integrovaná provedení.
GMR
senzory jsou na základě svojí funkční struktury vždy vyráběny a nabízeny jako
miniaturní integrované součástky, které pak samozřejmě další producenti např.
průmyslových systému mohou zakomponovat do nějakého většího zařízení. My zde
však půjdeme až ke zdroji a tedy se podíváme přímo na ona integrovaná provedení.
Obvykle se GMR senzory vyrábějí a nabízejí ve třech základních provedeních:
- magnetometry (magnetometers) = detekují sílu vnějšího mag. pole
- diferenční senzory (gradiometers) = detekují rozdílové mag. pole aplikované na dvě různá místa plochy senzoru
- senzory směru mag. pole (Angle GMR) = detekuje směr (natočení) externího mag. pole
Magnetometry (Magnetometers)
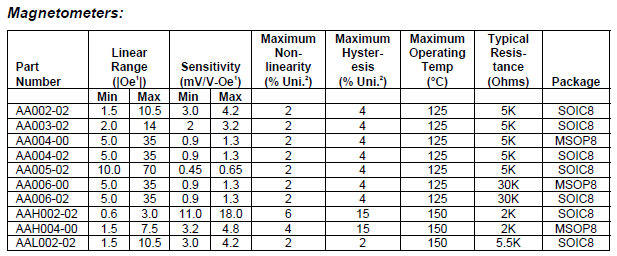
Tyto druh GMR senzorů určený pro „prostou“ detekci nebo měření velikosti externího magnetického pole je obvykle tvořen integrovaným Wheatstonovým můstkem ve většině případů na čipu doplněným přidruženou elektronikou pro zesílení, linearizaci a vyhodnocení signálu můstku, protože samotné signálové napětí můstku je v řádu stovek mV (na rozdíl od jen jednotek mV u Hallových senzorů). Výstup senzoru pak již tedy bývá nějaké standardizované elektrické rozhraní, ať už tranzistorové spínací u detektorů či lineární analogové u měřicích senzorů. Jen pro představu, plošná velikost takového integrovaného Wheatstonového můstku je cca 1400 x 350 mikrometrů (GMR senzory NVE) a odpor realizovaných GMR odporů bývá v řádu jednotek kOhmů.
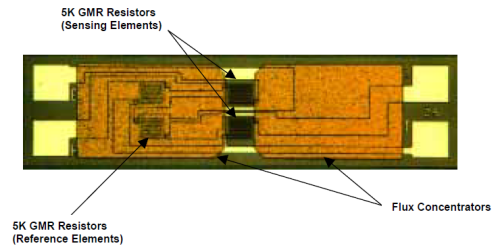
Můstek je obvykle tvořen jako poloviční měřicí, kdy dva rezistory jsou měřicí GMR elementy a dva jsou hodnotou pevné referenční rezistory. Někdy jsou všechny rezistory realizované jako GMR elementy, přičemž měřicí rezistory jsou obvykle opatřeny koncentrátorem magnetického toku (Flux Concentrator), která k nim přivádí externí mag. pole a měří jej a naopak odstiňují zbylé dva referenční rezistory. Také koncentrátor je prostředek pro vyladění citlivosti na stejnou úroveň u všech stejných součástek.
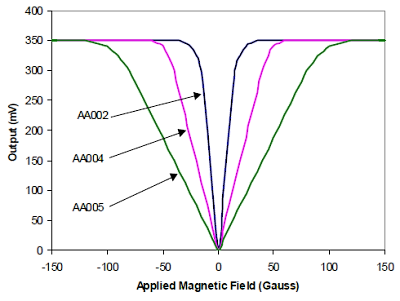
Typické převodní charakteristiky GMR magnetometrů (napětí - mag. pole) - zde konkrétně senzorů společnosti NVE.
 Diferenční
senzory (Gradiometers)
Diferenční
senzory (Gradiometers)
Tento typ GMR senzorů slouží pro měření či detekci rozdílů magnetického pole mezi dvěma různými místy senzoru. Prakticky se také využívá zapojení v podobě Wheatstonova můstku, ale zde již jde o plný můstek, kde všechny rezistory jsou měřicí. Dva GMR elementy jsou obvykle na jedné straně snímače a zbylé dva na druhé straně, čímž se výstup můstku rozvažuje podle rozdílu mag. pole v těchto dvou místech. Pokud je tedy senzor vložen do homogenního pole je výstup nulový. Vzdálenost mezi měřicími místy je zde tedy jedním z nejdůležitějších parametrů a obvykle bývá v řádu desetin až jednotek mm.
Použití diferenčních GMR senzorů je hlavně v oblasti detekce otáčení zubů ozubených kol nebo při realizací různých pohybových snímačů, např. rotačních enkodér. Také se využívá u moderních ABS systémů automobilů pro spolehlivé a přesné měření otáčení kol.

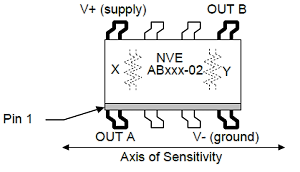
Znázorněné zapojení měřících GMR elementů u diferenčních senzorů.
 Senzory
směru mag. pole (Angle GMR)
Senzory
směru mag. pole (Angle GMR)
Toto provedení je dnes skoro nejčastěji vyráběnou strukturou, protože se využívá pro realizaci bezkontaktních senzorů úhlu natočení či rotace v celém úhlovém rozsahu 0 až 360° prostřednictvím natočení externího magnetického pole hodnot cca 10 až 500 gaussů. U vnitřní struktury tohoto provedení se využívá tzv. antiparalelního uspořádání vrstev GMR struktury obvykle označované jako spinový ventil (Spin Valve), jak již bylo popsáno v prvním díle - 1. díl - princip a struktura.
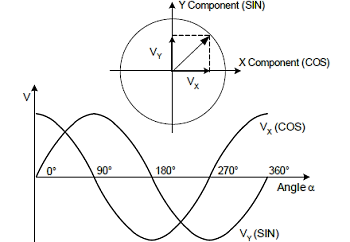
Stejně jako u magnetometrů, i zde se využívá Wheatstonova můstku, avšak zde složeného z GMR struktury "Spin Valve". Natočení GMR elementů (můstku) pak určuje "nulový úhel" a tento směr bývá na pouzdře senzoru vyznačen pro správnou orientaci součástky. Výstupem "Angle GMR" senzorů pak bývá buď kosinový a sinový napěťový signál (analogový výstup) nebo u "chytrých senzorů" s digitálním komunikačním výstupem pak již přímo spočítaná hodnota úhlu. Zde pak tedy moc nezáleží na samotné intenzitě mag.pole, která musí být jen dost velká proto, aby byla zaregistrována samotným senzorem, ale záleží na směru magnetických siločar.
 Výrobci
GMR senzorů
Výrobci
GMR senzorů
Pokud se začneme bavit a hledat GMR senzory z pohledu výrobců samostatných integrovaných senzorů zjistíme, že nabídka stále není příliš široká. Sice GMR jev se dnes využívá prakticky ve všech čtecích / zápisových hlavách moderních harddisků, ale jako integrované obvody již tak běžné nejsou.
Dá se skoro říct, že většinu současné produkce GMR senzorů zajišťují následující výrobci:
- NVE Corporation
- Infineon Technologies
- Hitachi
GMR senzory NVE
Dá se říct, že společnost NVE Corporation patří mezi specialisty na GMR senzory, protože v jejich nabídce je hned několik desítek různých provedení s různou strukturou, různým měřicím/spínacím rozsahem a výstupním rozhraním.
Najdeme zde celou plejádu výše popsaných typů:
- Magnetometry s analogovým výstupem s označením AAxxx, AALxxx nebo AAHxxx
- Diferenční senzory s analogovým výstupem s označením ABxxx nebo ABHxxx
- Spinové ventily s analogovým výstupem s označením AAVxxx
- Detektory se spínaným výstupem s označením ADxxx
- Speciální řada GT Sensor pro rotačních enkodéry s označením AKVxxx
Z tohoto je patrné, že počet zástupců integrovaných GMR senzorů společnosti
NVE je opravdu velmi rozsáhlý.
Z pohledu senzorů s analogovým výstupem má nejvíce zástupců řada magnetometrů, které jsou realizovány jako výše popsané měřicí můstky se 2 snímacími GMR elementy a 2 zastíněnými referenčními (neměřicími) GMR elementy.
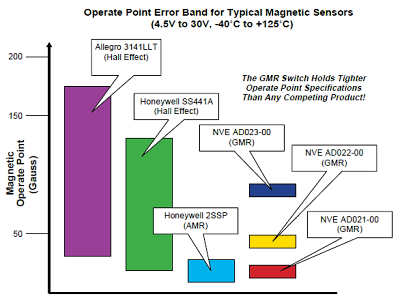
Tyto senzory jsou však tvořeny jen čistě oním můstkem bez další integrované elektroniky a proto při citlivostech v řádu desítek mV/V a napájení 24 V, se výstupní napětí pohybuje v řádu desetin jednotek V. Převodní charakteristiky pak mají typický průběh GMR senzorů, tedy onen typický tvar „V“.
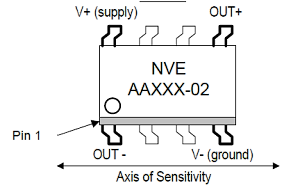
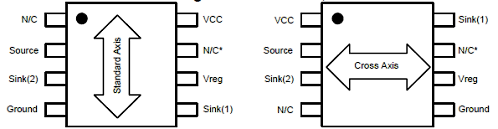
Pouzdro a vnitřní uspořádání magnetometrů společnosti NVE.
Angle GMR sensors:
Na řadu magnetometrů pak navazuje provedení typu spinový ventil, reagující nejen na přítomnost, ale i natočení externího mag. pole v rozsahu 30 až 200 Oe. Výstup se pak podle úhlu mění ve tvaru sinu nebo cosinu. Senzory mají oba výstupy, a proto lze případně z toho detekovat i směr otáčení.
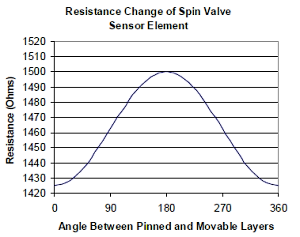
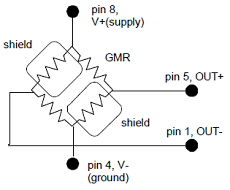
Vnitřní zapojení měřicího můstku a převodní závislost odporu GMR elementu na směru externího mag. pole.
Nabízené jsou jako dva poloviční můstky v jedné součástce, nebo jako jeden plný měřicí můstek GMR rezistorů s odporem 1,5 kOhmů. Tyto senzory opět obsahují jen samotné můstky bez přidané elektroniky, takže analogový výstup je nutné připojit na nějakou zesilovací a vyhodnocovací jednotku. Na pouzdru je pak vždy značka natočení vnitřního čipu a tedy v jakém směru se vyskytuje „úhlová nula“.
Některé GMR senzory společnosti NVE mají implementované a vyvedené dva poloviční měřicí můstky.
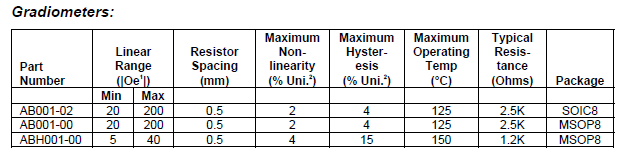
Nakonec je tu velká nabídka diferenčních GMR senzorů opět realizovaných kompletním měřicím můstkem, kde jedna půlka můstku je umístěna na jedné straně pouzdra a druhá na druhé straně, vzdálení 0,5 mm. Měří se pak rozdíl magnetického pole v těchto dvou místech, tedy prakticky gradient. Výstup je opět přímo ze můstku, takže výstupní napětí se pohybuje v řádu desítek mV.
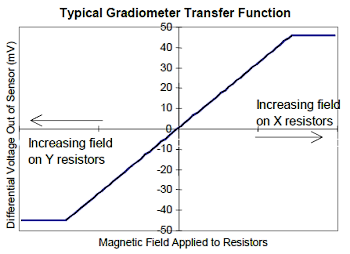
Pouzdro a převodních charakteristika (rozdílové napětí - mag. pole) diferenčních GMR senzorů NVE.
Switch Digital Sensors:
Asi největší výběr je pak na poli detektorů magnetického pole, tedy jednoduchých senzorů se spínaným výstupem aktivovaným po překročení pevně definované úrovně externího magnetického pole.
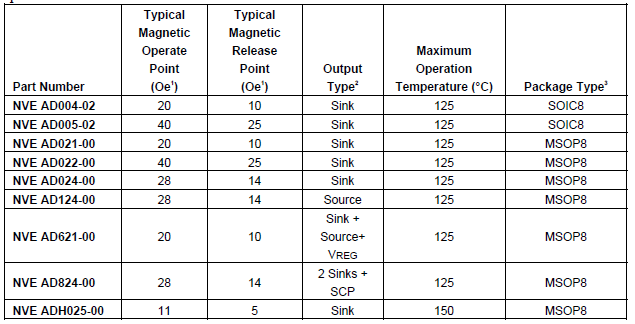
Tyto senzory tak již v sobě obsahují i mimo snímacího můstku i jednoduchou vyhodnocovací elektroniku. Jejich označení je ADxxx a v nabídce společnosti NVE jejich více jak 100, které se navzájem liší provedením a počtem výstupů, spínací úrovní (10 až 80 Gaussů = 1 až 8 mT = 0,8 až 6,4 kA/m), hysterezí (5 až 40 Gaussů), napájecím napětím (4 až 30 VDC), velikostí a typem pouzdra (SIOC8, MSOP8, TDFN6).
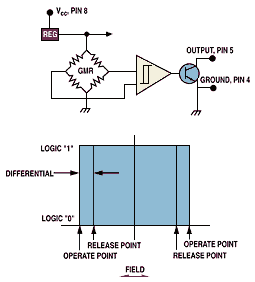
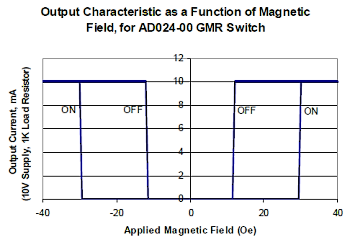
Bloková struktura a příklad spínací charakteristiky GMR detektorů se spínaným výstupem.
V nabídce společnosti NVE jsou typy, které reagují na i různý směr mag. pole.
Zde je však základních a nejpoužívanějších 25 zástupců:
GMR senzory Infineon
 Nabídka
společnosti není rozhodně tak široká jako nabídka společnosti NVE, ale přesto
patří mezi aktuálně nejvýznamnější výrobce. Jejich sortiment aktuálně zahrnuje
5 SMD typů řady Angle iGMR s typickým označením TLE50xx, tedy přesněji 2 jsou
již aktuálně vyráběné a 3 se budou vyrábět v nejbližší době. Ve všech případech
však jde o provedení měření/detekce úhlu natočení magnetického pole v rozsahu
0 až 360°, tedy prakticky jde o spinové ventily. Tím Infineon doplňuje výrazně
širší nabídku integrovaných Hallových senzorů.
Nabídka
společnosti není rozhodně tak široká jako nabídka společnosti NVE, ale přesto
patří mezi aktuálně nejvýznamnější výrobce. Jejich sortiment aktuálně zahrnuje
5 SMD typů řady Angle iGMR s typickým označením TLE50xx, tedy přesněji 2 jsou
již aktuálně vyráběné a 3 se budou vyrábět v nejbližší době. Ve všech případech
však jde o provedení měření/detekce úhlu natočení magnetického pole v rozsahu
0 až 360°, tedy prakticky jde o spinové ventily. Tím Infineon doplňuje výrazně
širší nabídku integrovaných Hallových senzorů.
Konkrétně jsou v nabídce již tyto modely:
- TLE5009 - Angle iGMR s analogovým výstupem
- TLE5011 - Angle iGMR se sériovým digitálním rozhraním SPI
- TLE5012 - Angle iGMR s rozhraními SPI, PWM, HSM, IIF
- TLI5012 - Angle iGMR s rozhraními SPI, PWM
- TLE5012B - Angle iGMR s rozhraními SPI, IIF
Základní typ TLE5011
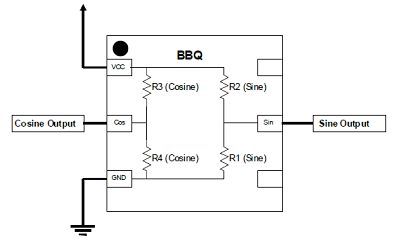
Pouzdra GMR senzorů TLE5011 a jednotlivé komponenty výstupů vnitřních dvou měřicích můstků z nichž vyhodnocovací elektronika počítá úhel natočení (směr) externího mag. pole.
Od března tohoto roku se pak prodává zatím základní typ TLE5011, který představuje moderní GMR senzor s měřicím rozsahem 30 až 50 mT, 16bitovým zpracováním signálu a s plně digitálním komunikačním sériovým rozhraním a vyráběné 250 nm technologií.
Senzor obsahuje dva plné můstky, jeden pro detekci v ose X (kosinová složka) a druhý v ose Y (sinový složka). Z výstupních signálů těchto můstků po digitalizaci 16bit. Sigma-Delta převodníkem se již digitálně počítá konkrétně úhel natočení externího pole v rozsahu 0 až 360°. Výsledek se pak vysílá v podobě čísla po SPI sběrnici do nadřazeného systému.
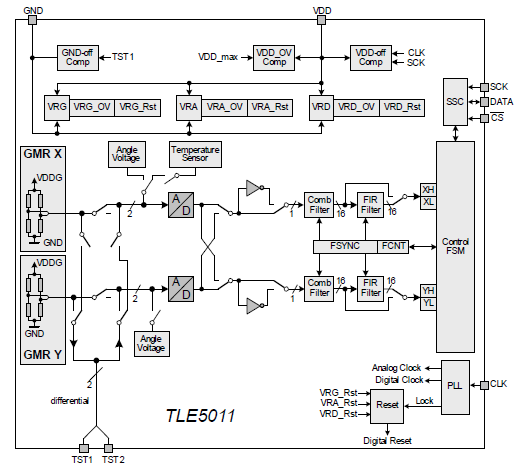
Blokové schéma zapojení GMR senzoru TLE5011.
 Nejnovější
typ TLE5009
Nejnovější
typ TLE5009
Dalším zajímavým zástupcem je zatím nejnověji avizovaný typ TLE5009, který obsahuje analogový výstup se sinovým a kosinovým průběhem signálu vzhledem ke směru magnetického pole.
Na rozdíl od vcelku jednoduchých NVE senzorů, které prakticky obsahují jen integrovaný Wheatstonovým můstek, zde je s ním implementována i kompletní zesilovač a vyhodnocovací elektronika kompenzující offset či vliv teploty. Napájení je od 3,3 do 5,0 V DC.
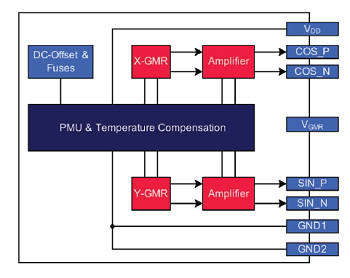
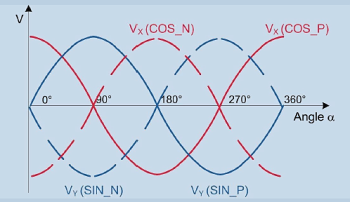
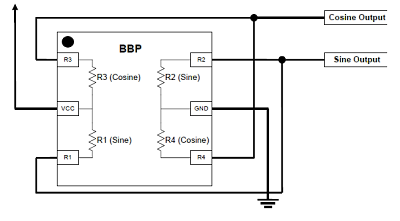
Blokové schéma vnitřního zapojení GMR senzoru TLE5009 a jeho výstupní analogové průběhy.
Závěr
Dnes jsme si ukázali některé prakticky realizované, vyráběné a prodávané GMR senzory v podobě integrovaných součástek. Výrobců těchto zajímavých senzorů stále není mnoho, ale nabídka se každým měsícem rozšiřuje a v budoucnu jistě bude konkurence daleko obsáhlejší.
Ještě jsme se však nepodívali na použití GMR senzorů v již zmíněných čtecích hlavách harddisků. Toto téma pak trošku "naťukneme" ve 3. díle.
Článek vytvořil z podkladů výrobců: Antonín Vojáček
DOWNLOAD & Odkazy
- Video ukázky principu a funkce GMR senzoru - www.aldebaran.cz/animace/Phy_gmr.mpg, www.nve.com/GMR-video.php
- Zajímavé dokumenty o GMR jevu a senzorech:
- Carl H. Smith a Robert W. Schneider: "Low-Field Magnetic Sensing with GMR Sensors", Nonvolatile Electronics, Inc.
- Odkazy na stránky výrobců se sortimentem GMR senzorů:
- Společnost NVE Corporation - www.nve.com/products.php
- Společnosti Infineon Technology - www.infineon.com/cms/en/product/sensors-and-wireless-control/magnetic-sensors..
- Další zajímavé odkazy na stránky o GMR jevu a senzorech:
- http://mrsec.wisc.edu/Edetc/IPSE/educators/activities/gmr.html
- http://www.ornl.gov/info/ornlreview/v34_2_01/magnetic.htm
- http://www.promconversia.com/eng/magnet/gmr
- https://www1.hitachigst.com/hdd/technolo/gmr/gmr.htm
- http://www.pcguide.com/ref/hdd/op/heads/techGMR-c.html
- http://www.physik.fu-berlin.de/en/einrichtungen/ag/ag-von-oppen/research/spintronics/index.html
- http://www.ece.nus.edu.sg/stfpage/elewuyh/wuyihong.htm
- https://www1.hitachigst.com/hdd/research/recording_head/headmaterials/index.html
- První díl článku o GMR senzorech na stránkách automatizace - automatizace.hw.cz/gmr-senzory-mag-pole-1-dil-princip-a-struktura
- Další články a testy o snímačích, PLC, komponentech nejen pro průmyslové aplikace najdete na stránkách serveru automatizace.HW.cz



