
BionicCobot
Pohybovým vzorem je lidská paže. Rameno, horní část paže, loket, vřetenní a loketní kost a ruka. Každá z jeho částí využívá přirozeného pohonu bicepsu a tricepsu. Je tedy možné provést velmi jemné pohyby, stejně jako jeho biologický model.
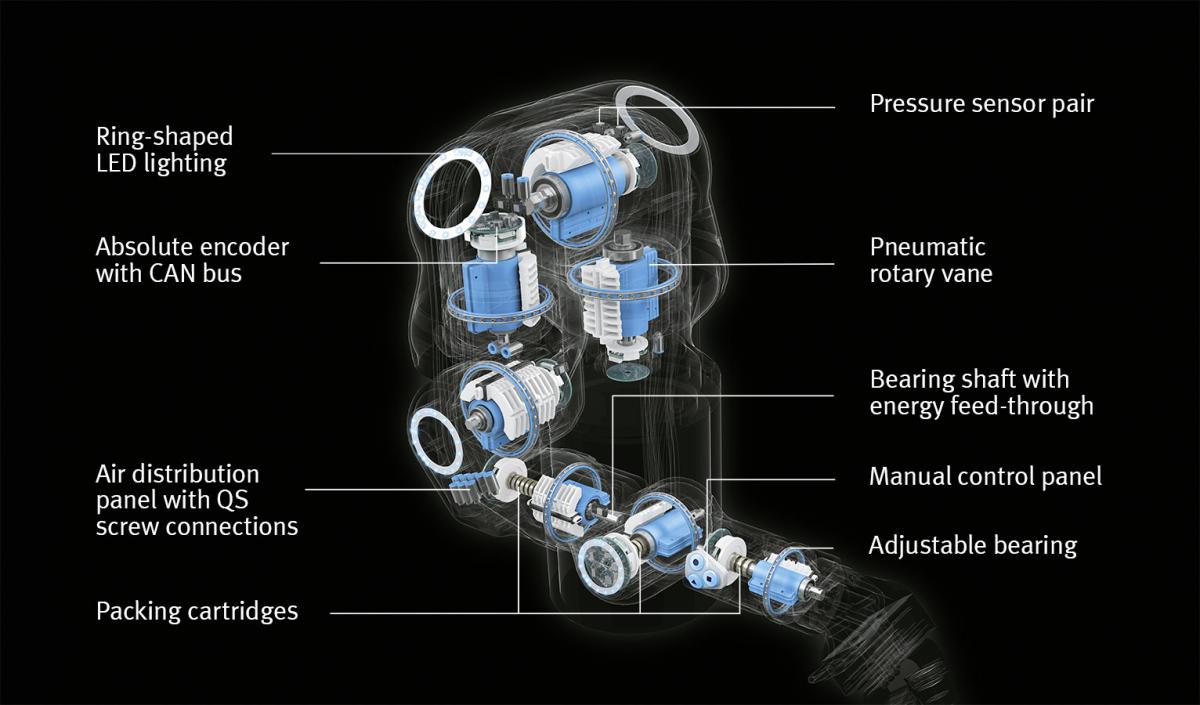
Pohyb BionicCobot lze jemně konfigurovat tak, aby byl buď silný a dynamický nebo citlivý a snadno se ovladatelný. Systém nemůže ohrozit člověka v případě kolize. K řízení je použito „Festo Motion Terminal“. Jedná se o pneumatické automatizační platformu, která je přímo určená pro řízení vysoce přesné mechaniky, senzorů a to ve velmi malém prostoru. BionicCobot mohou může být vybaven různými upínacími systémy. Uživatel může BionicCobot naučit akce, které mají být provedeny. K tomuto účelu slouží speciálně vyvinuté grafické rozhranní. Definované pracovní kroky mohou být přeneseny pomocí drag-and-drop do sekvenceru k realizaci v libovolném pořadí. Celá sekvence pohybu je prakticky znázorněna a současně simulována na reálném BionicCobotu.
Více informací na: www.festo.com/group/en/cms/12746.htm
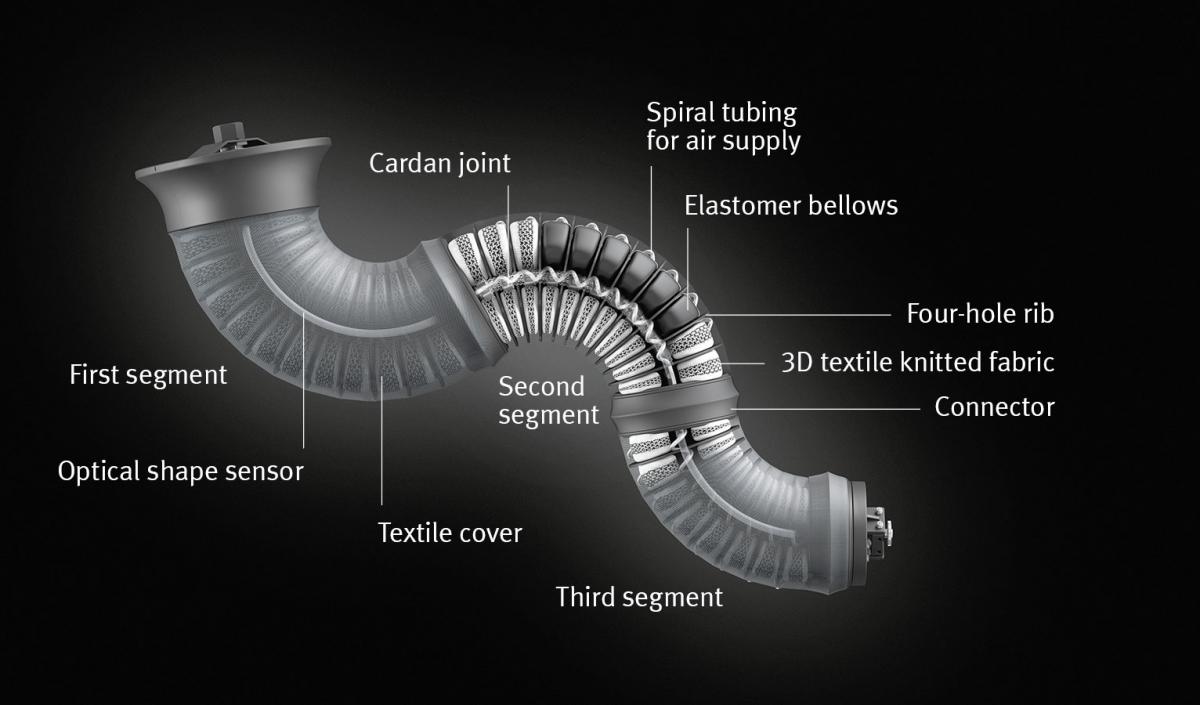
BionicMotionRobot
Chobot se může pohybovat velmi pružně. BionicMotionRobot emuluje pohyby pomocí pneumatických měchů, které kopírují strukturu sloního chobotu. Ovládání je pomocí několika ventilů a celá flexibilní kinematika je odvozena od Bionic Handling Assistant z roku 2010, který obdržel německou Future Award. Vnější plášt je vyrobený z 3D textilní pleteniny. Robotické rameno má nosnost téměř tří kilogramů.
Více informací na: www.festo.com/group/en/cms/12747.htm
OctopusGripper
OctopusGripper je založený na principu chapadel chobotnice. Chapadlo se skládá z měkké silikonové struktury, které je pneumaticky ovládáno. Stlačený vzduch chapadlo ohýbá směrem dovnitř a tím se může omotat kolem objektu. Tímto sevřením může uchopit předmět šetrným způsobem stejně jako chapadlo chobotnice. Dvě řady aktivně a pasivně řízených přísavek jsou uspořádány na vnitřní straně silikonového chapadla. To umožňuje OctopusGripper uchopovat různě tvarované objekty. Chapadlo se může použít pro široké spektrum aplikací. Lze kombinovat s BionicMotionRobot a BionicCobot řízené pomocí Festo Motion Terminal.
Více informací na: www.festo.com/group/en/cms/12745.htm
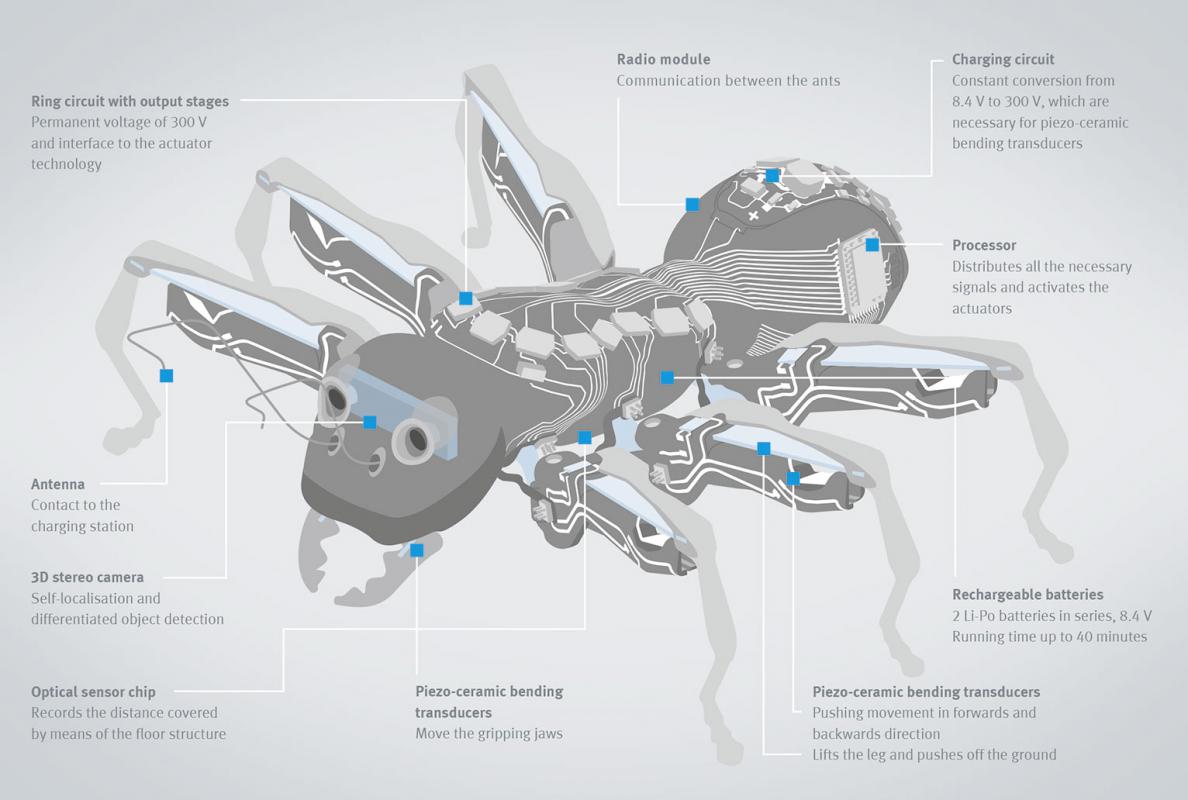
BionicANTs
Cílem projektu BionicANT (Bionic Autonomous Networking Technologies) bylo vytvořit robotické mravence, kteří budou moci fungovat společně na konkrétním úkolu. Stejně jako v přírodě, kde mravenci dovedou spoluprací přenášet i obrovské předměty na větší vzdálenosti, případně napadnout a zabít i mnohem většího nepřítele. Jeden mravenec dokáže přenést až stokrát těžší objekt než je on sám. Základní kostra robotických mravenců byla vytištěná na 3D tiskárně. O přesný pohyb nohou se starají piezo-keramické motorky s minimální spotřebou energie. K navádění slouží 3D kamera a optický laser pro sledování pohybu vůči ploše. Mravenci mezi sebou komunikují bezdrátově pomocí Wi-Fi.
Více informací na: www.festo.com/group/en/cms/10157.htm
eMotionButterflies
Festo již před několika lety vyrobilo roboty, kteří lítají jako ptáci. Využívají k letu pouze křídla, žádné vrtule. Konstrukce musí být velmi úsporná a lehká a tvar aerodynamický, co možná nejefektivnější pro let. Festo představuje miniaturní létající roboty, kteří dokážou společně komunikovat, ale jinak než u zmíněných mravenců. Samotné tělo robotického motýla (podobně jako toho přírodního), je oproti křídlům velmi malé a lehké. Uvnitř těla se nachází miniaturní baterie s kapacitou 90 mAH pro tři až čtyři minuty letu. Řadič ATxmega32e5, ATmega328, dva servomotorky Mark Star, gyroskop, akcelerometr a kompas pro měření pohybu a dva radiové moduly. Na těle jsou dvě infračervené LED pro snímání externí kamerou. O výpočet letu se stará externí počítač, který motýly sleduje pomocí infrakamery a přes radiový signál posílá instrukce pro servomotorky křídel. Externí počítač s deseti infračervenými kamerami v rámci 160 snímků za sekundu sleduje pozice všech motýlů. Zajišťuje, aby se při letu nikdy nesrazili.
Více informací na: www.festo.com/group/en/cms/10216.htm
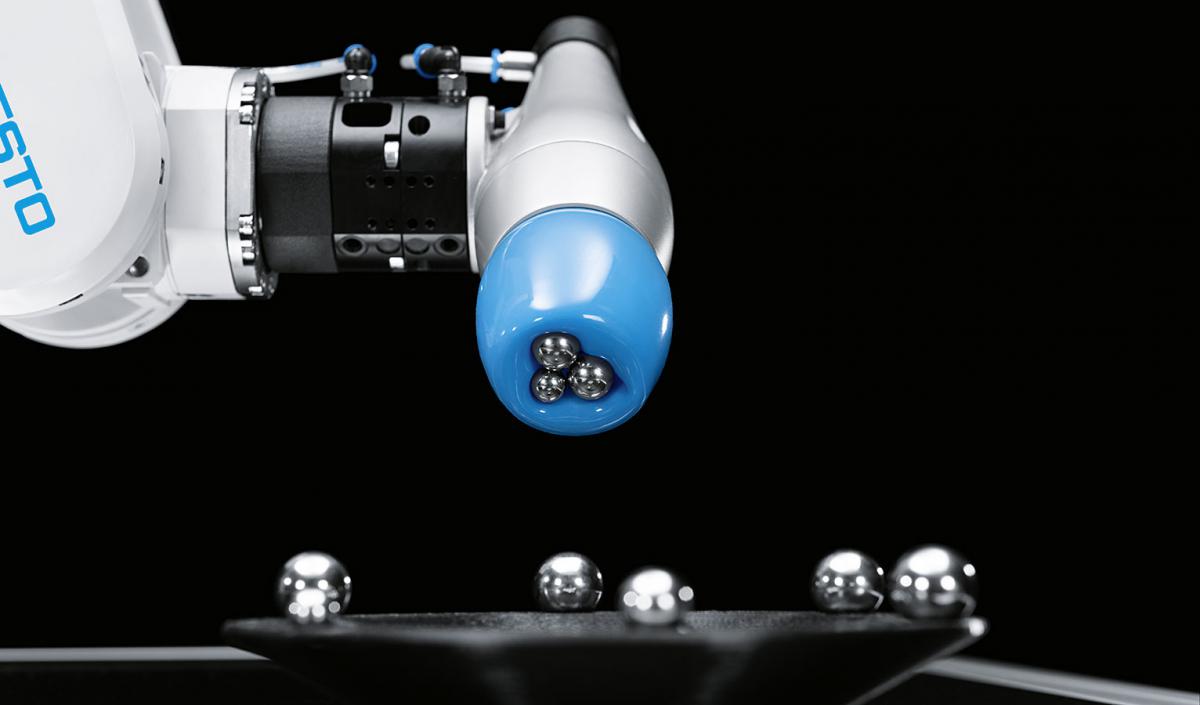
FlexShapeGripper
U chameleona, konkrétně u jeho jazyka, se nechali inspirovat inženýři Festa pro tvorbu lapače, který dokáže jemně uchopit takřka jakýkoli objekt. Nejedná se o žádné složité robotické prsty nebo tyčky. FlexShapeGripper je schopen uchopit různé objekty vyrobené z různých materiálů – může jít o pevné a těžké kovové věci nebo naopak lehké a křehké, jako třeba brýle. To vše, aniž by bylo nutné cokoli nastavovat z pohledu hardwaru nebo softwaru. Technologie funguje na bázi stlačeného vzduchu, vody a elastického silikonu. Při uchycení se silikonový povrch, který je uvnitř naplněn vodou, rozprostře kolem objektu a po zablokování tlaku zůstane perfektní tvar, který drží daný objekt. Při držení už není potřeba žádná energie, která je tak nutná pouze pro uchycení a uvolnění. Díky tomuto systému je také možné uchopit i několik předmětů najednou, což je prezentováno například na několika kuličkách. FlexShapeGripper je schopen uchopit i zcela plochý předmět.
Více informací na: www.festo.com/group/en/cms/10217.htm

SupraMotion
Pokročilá výroba budoucnosti bude vyžadovat i technologie, které umožní pohybovat objekty bez přímého dotyku. Případně budou ve vakuu, chemických sloučeninách a podobných místech, kde žádné stroje nepůjde použít nebo to nebude použitelné. Technologie SupraMotion 3.0 využívá supravodivost a zamknutí magnetického pole permanentního magnetu pro reálné použití při výrobě. Systém je složen z permanentního magnetu, který generuje magnetické pole a supravodiče, který je pomocí elektrického chlazení se spotřebou 80 W ochlazen na -180 stupňů Celsia. Stačí tak s externí destičkou nastavit konkrétní vzdálenost, ve které má být nad permanentním magnetem (v rámci několika jednotek milimetrů) a po ochlazení zůstane zablokován v dané vzdálenosti. Pro stálé udržení je tak potřeba pouze 80 W na jeden supravodivý krystal, přičemž i v případě výpadku energie zůstane efekt k dispozici několik minut. Festo pomocí technologie SupraMotion 3.0 představilo několik unikátních použití, které se současnými stroji a konstrukcemi nejsou možné – ať už jde o různé systémy pro bezdotykový přesun nebo rotující a bezkontaktní rotující hřídel a podobně. Možnosti využití takové technologie jsou obrovské a týkají se především náročných věcí, které kvůli současným strojům nelze ani vyrobit.
Více informací na: www.festo.com/group/en/cms/10896.htm



