
Robotika je již dlouho velmi důležitou součástí automatizace a to především ve vyspělých zemích, kde je tradičně kladen důraz na přesnost, rychlost a opakovatelnost. Tento trend se projevuje stále více a to i v případech, kde dosud bylo „levnější“ použít lidského operátora. Roboty se stále více používají pro pick and place, montáže, ale i pro úlohy přesného měření. Beckhoff je na tento trend velmi dobře připraven.

Kinematické knihovny
Beckhoff Automation má ve své koncepci velmi dobrou softwarovou podporu pohonů, což tvoří základ právě pro podporu robotiky. Programovací prostředí TwinCAT3 je integrováno pod Microsoft Visual Studio® a je v něm možné programovat pomocí jazyků definovaných normou IEC61131-3 PLC tak i pomocí vyšších jazyků jako je C++. Další výhodou je návaznost na LabView a Matlab/Simulink®. Právě u druhého jmenovaného nástroje je možné využít velké možnosti matematického modelování pro robotiku.
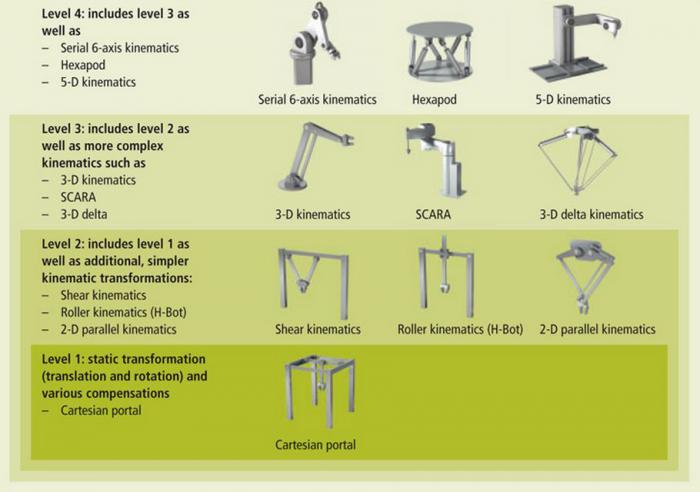
TwinCAT3 přímo nabízí kinematické knihovny, které řeší úlohy robotiky. Tyto kinematické knihovny jsou rozděleny do čtyř úrovní dle náročnosti kinematiky, od kartézského systému až po 6 - ti osého robota.
Tyto knihovny lze v TwinCAT3 velmi jednoduše používat a programátor se tak může soustředit jen na vlastní aplikaci. Kinematickou knihovnu je nutné použít spolu s licencí NCi, což je licence, která umožňuje načíst a provádět G-kód, který je standardem pro CNC stroje. Robota lze potom použít například na nanášení lepidla nebo i na obrábění. Robot je tedy zjednodušeně řečeno soustava několika pohonů, které je nutné vzájemně synchronizovat. Samozřejmě při použití dostatečně silného procesoru je možné mimo robota řídit další pohony nebo řešit třeba zpracování obrazů z kamerových systémů.
Delta robot v praxi
Velmi pěknou aplikací tzv. Delta robota je aplikace třídící linky, která byla nedávno realizována ve Švédsku. Tato linka má za úkol třídit vysekané součásti z plechu na základě kamerových testů. Celá linka je plně automatizována a řízena průmyslovým PC. Beckhoff tedy zabezpečuje testování každé součásti, tak i ostatní funkce linky včetně řízení Delta robota. Delta robot je osazen třemi servomotory z produkce Beckhoff a každý motor je samostatně řízen svým servoměničem. Kinematická knihovna L3 potom zajišťuje synchronnost pohybů všech tří servomotorů. Robot slouží právě k třídění dobrých a špatných výrobků. Celá linka přináší svému majiteli plně automatickou kontrolu výrobků s vysokým taktem a vysokou spolehlivostí.

Podpora 6-ti osých robotů
Beckhoff však umožňuje i řízení 6-ti osých robotů. Ukažme si to na příkladu dvou významných značek, KUKA a Staübli.
Pro řízení robotů KUKA s řídící jednotkou KR C4 je připravena speciální knihovna MX Automation, která zajišťuje komunikaci s řídící jednotkou KUKA pomocí sběrnice EtherCAT. Knihovna potom zajišťuje přímé řízení robota.
Staubli uvedlo na trh jednotku UniVal, která má komunikační sběrnici EtherCAT a je tak velmi snadno připojitelná k systému Beckhoff. Robot se v HW konfiguraci jeví jako zcela standardní EtherCAT zařízení se všemi vlastnostmi a výhodami, na které jsou uživatelé zvyklí. Přímo v HW konfiguraci se nastaví mechanické vlastnosti robota a potom je již vše záležitostí práce s kinematickou knihovnou.
V obou případech je řídícím počítačem zajišťován kompletní výpočet kinematiky robota a řídící algoritmus tak přebírá veškeré úlohy, které dříve zajišťovaly řídící jednotky robotů. Lze tak velmi dobře kombinovat všechny výhody systému Beckhoff s 6-ti osými roboty. Výhodou je, že uživatel používá pouze jedno programovací prostředí, s tím samozřejmě souvisí i jednoduchá vzdálená správa, jedna vizualizace atd.
Samozřejmě pokud by někdo měl vážný důvod, může si navrhnout i zcela vlastní design mechaniky robota a softwarová podpora zůstává stále stejná.

Robotika a XFC (eXtreme Fast Control)
Kompletní integrace robotiky do systému Beckhoff se sběrnicí EtherCAT umožňuje využití všech technologií, včetně XFC (eXtreme Fast Control). Tato technologie se velmi dobře hodí pro velmi rychlé měření nebo naopak pro řízení. Beckhoff nabízí několik inteligentních karet s technologií XFC, které podporují časovou značku na EtherCATu. Ve stručnosti to znamená, že karta dokáže například vzorkovat analogový signál až do 30kHz a každý vzorek má přesně uvedený čas, kdy k měření došlo a to s rozlišením 10ns (nanosekund). To lze použít například v případě, že na mechaniku robota umístíme silový sensor a chceme mít opravdu přesný záznam o síle vázaný na čas a dráhu robota, přičemž robota je možné řídit ve smyčce 2ms. V každé smyčce je potom možné získat až 60 naměřených vzorků v přesnosti 16-bit.
A mnoho dalšího…
Tento článek nastínil jenom některé možnosti v aplikaci robotů, které nabízí Beckhoff Automation, dalšími možnostmi je kombinace s pohony, CNC technologií nebo s mechatronickým pohonem XTS. Beckhoff již tradičně nabízí to nejlepší v oblasti automatizace a podpora robotiky to jenom potvrzuje.
Beckhoff Česká republika s.r.o.
Sochorova 23
616 00 Brno
Česká republika
Telefon:+ 420 511 189 250
Obchod: obchod.cz@beckhoff.com



