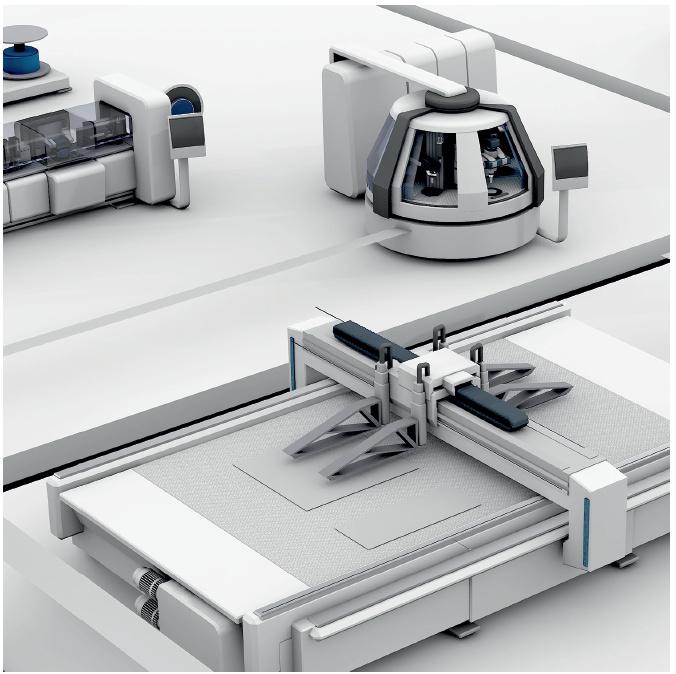
 Pokud tedy je potřeba zvýšit produktivitu a šetřit zdroje, jsou podmínkou efektivní, inteligentní a regulované pohony s vestavěnými nebo integrovanými systémy k měření dráhy poskytující zpětnou vazbu a systémy ke snímání polohy. Například tak umožňují rychlou a bezpečnou automatickou změnu formátů, zdvihů a koncových poloh os. Tím je zaručena flexibilní výroba a podporována produktivita. Dynamické řízení pohonu na míru přizpůsobené výrobku při maximálním počtu zdvihů zaručuje také energeticky efektivní výrobní proces. To zajišťuje vysokou dynamiku a přesnost polohování lineárních os razicích, vysekávacích nebo ohýbacích strojů.
Pokud tedy je potřeba zvýšit produktivitu a šetřit zdroje, jsou podmínkou efektivní, inteligentní a regulované pohony s vestavěnými nebo integrovanými systémy k měření dráhy poskytující zpětnou vazbu a systémy ke snímání polohy. Například tak umožňují rychlou a bezpečnou automatickou změnu formátů, zdvihů a koncových poloh os. Tím je zaručena flexibilní výroba a podporována produktivita. Dynamické řízení pohonu na míru přizpůsobené výrobku při maximálním počtu zdvihů zaručuje také energeticky efektivní výrobní proces. To zajišťuje vysokou dynamiku a přesnost polohování lineárních os razicích, vysekávacích nebo ohýbacích strojů.
Dnes existují a využívají se různé systém měření pohybu a polohy motorů, které se volí nejen podle typu zvoleného pohonu (rotační vs. lineární), ale také podle potřebné přesnosti polohování nebo rychlosti měření. Mezi nejspolehlivější systémy, které jednoznačně definují polohu hned po zapnutí i resetu zařízení bez potřeby hledat indikační značky, jsou absolutní zpětné vazby polohy. Ty lze využít jak pro rotační, tak pro lineární typy pohonů a díky absolutnímu systému kódování měření odpadá náročné najíždění referenčního bodu.
Princip magnetického měřícího systému
 Magneticky kódované systémy měření polohy, natočení, či rychlosti otáčení jsou alternativou k původním magnetickým, indukčním, i optickým řešením, které jsou běžné u klasických a rotačních enkodérů. Proti nim mohou představovat snadnější instalaci měření posuvu a následně i jednodušší údržbu. Zatímco mechanický převod, ať již jde o ozubený či třecí, je nutné v prašném prostředí často čistit, promazávat a pravidelně kontrolovat opotřebení, u magnetických senzorů to není nutné, protože zde nedochází žádnému přímému dotyku posunujícího objektu a senzoru. Navíc v případě lineárního pohybu lze posun měřit s rozlišením až na tisíciny mm v rozsahu 0 až několik desítek metrů.
Magneticky kódované systémy měření polohy, natočení, či rychlosti otáčení jsou alternativou k původním magnetickým, indukčním, i optickým řešením, které jsou běžné u klasických a rotačních enkodérů. Proti nim mohou představovat snadnější instalaci měření posuvu a následně i jednodušší údržbu. Zatímco mechanický převod, ať již jde o ozubený či třecí, je nutné v prašném prostředí často čistit, promazávat a pravidelně kontrolovat opotřebení, u magnetických senzorů to není nutné, protože zde nedochází žádnému přímému dotyku posunujícího objektu a senzoru. Navíc v případě lineárního pohybu lze posun měřit s rozlišením až na tisíciny mm v rozsahu 0 až několik desítek metrů.
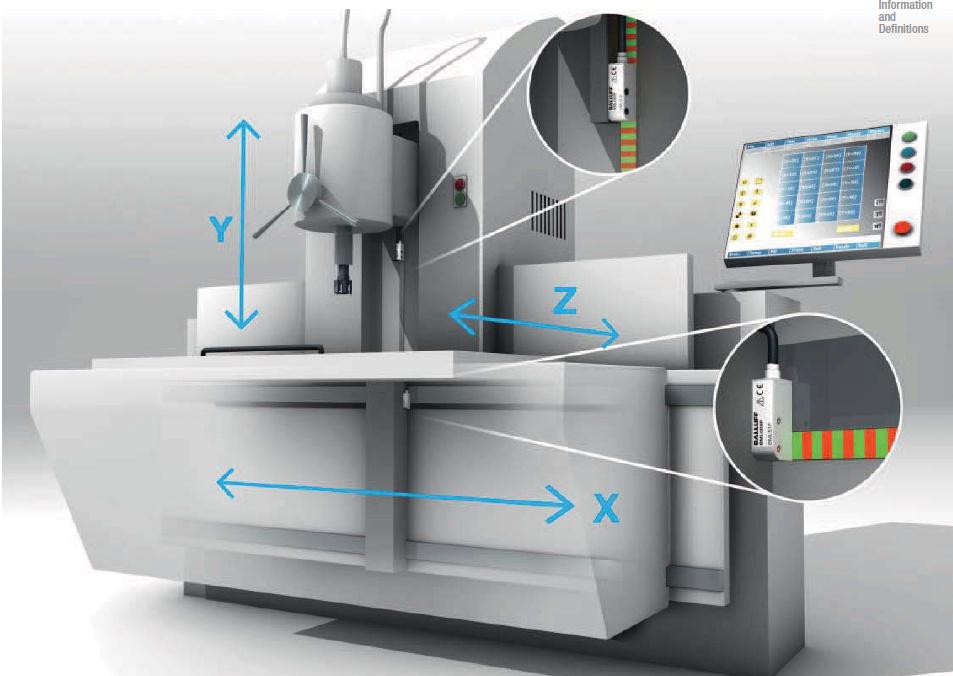
 Magnetické kódované systémy měření polohy se skládají z permanentně magnetizovaného materiálu ve formě kotouče (pro snímání rotačního pohybu) nebo pásku (pro snímání lineárního pohybu) a snímací hlavice umístěné nad páskou ve vzdálenosti až 0,8 mm v případě absolutního systému měření a až 2 mm v případě jednoduššího inkrementálního systému měření. Jde tedy o zcela bezkontaktní měření, který je při stejné přesnosti jako u běžných optických systémů navíc velmi odolný proti různému znečištění, a to jak prachem a vodě/oleji (hlavní výhoda proti optickému systému) jak i proti znečištění pilinami nemagnetických kovů při obrábění atd. (výhoda proti indukčním systémům). Není tedy nutné provádět zapouzdření magnetické snímané pásky, narozdíl například od velmi pouzdřených optických rotačních enkodérů.
Magnetické kódované systémy měření polohy se skládají z permanentně magnetizovaného materiálu ve formě kotouče (pro snímání rotačního pohybu) nebo pásku (pro snímání lineárního pohybu) a snímací hlavice umístěné nad páskou ve vzdálenosti až 0,8 mm v případě absolutního systému měření a až 2 mm v případě jednoduššího inkrementálního systému měření. Jde tedy o zcela bezkontaktní měření, který je při stejné přesnosti jako u běžných optických systémů navíc velmi odolný proti různému znečištění, a to jak prachem a vodě/oleji (hlavní výhoda proti optickému systému) jak i proti znečištění pilinami nemagnetických kovů při obrábění atd. (výhoda proti indukčním systémům). Není tedy nutné provádět zapouzdření magnetické snímané pásky, narozdíl například od velmi pouzdřených optických rotačních enkodérů.
Magnetický systém je podobně jako optický systém vyráběn jako buď jednodušší inkrementální, tedy definující směr otáčení a posun polohy bez absolutní indikace polohy, nebo absolutní kódovaný, kdy každá poloha (natočení) má jasně definované kódové číslo. Zatímco u inkrementálního systému je nutné vždy na začátku měření, v případě požadavku přesného určení polohy, nejdříve nalézt počáteční či referenční měřící polohu a od až od něj je možné přesně počítat přírůstek nebo úbytek, u absolutního systémů kdykoliv v každé situaci stačí jen přečíst aktuální kód (číslo) a dle přesného předem daného přiřazení místa na stupnici je poloha hned přesně definována. Nemůže tedy nikdy vzniknout chyba v určení polohy. V tomto směru je pak jediná výhoda inkrementálního systému v podobě teoreticky nekonečného měřící rozsahu, zatímco u absolutně kódovaného systému je maximální rozsah daný rozsahem a jemností kódu (čím větší měřící rozsah polohy máme, tím musí mít kód větší rozsah / množství pozic nebo nižší rozlišení polohy). Inkrementální systém je tedy spíše výhodný pro měření rychlosti pohyb či otáčení, zatímco absolutní systém spíše pro přesně měření posunu či natočení.
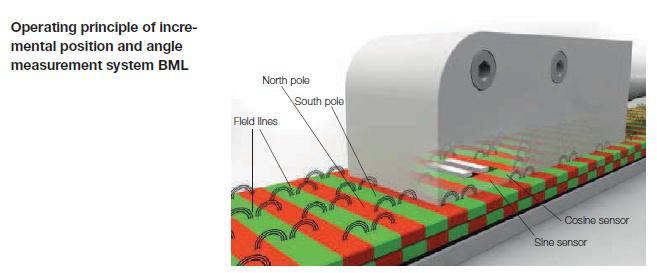

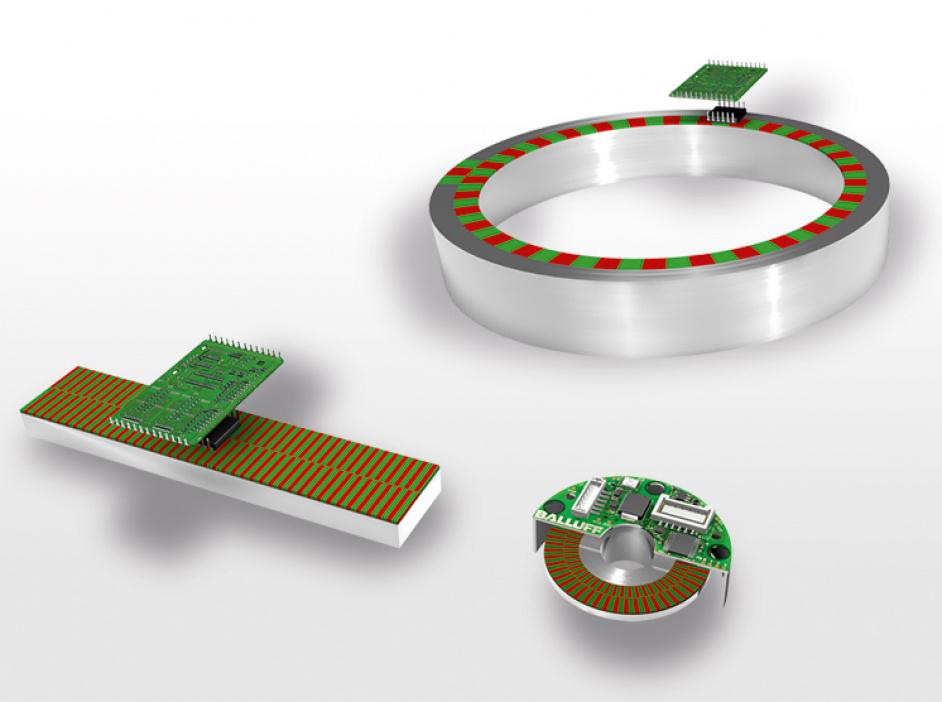
Princip magnetických senzorů pohybu - enkodérů Balluff BML: inkrementální provedení (obr. vlevo) a absolutní provedení (obr. vpravo).
Princip funkce magnetických lineárních senzorů je založen na detekci změny polarity magnetického pole permanentního magnetu snímaného dvěma nebo více Hallovými senzory. Využívá se k tomu dlouhý (někdy i několik desítek metrů dlouhý) speciální magnetický pásek, který se umístí na rovnou plochu po celé délce pohybujícího se pohybujícího objektu (měření lineárního posuvu) nebo na obvod kotouče (u měření natočení). Například může jít až o 48 m dlouhý pásek umístěný po celé délce (šířce) dráhy posuvu. Na pevné konstrukci či držáku, který se vůči pohyblivé ploše v klidu, se pak umístí zapouzdřený magnetický snímač, který v sobě obsahuje mimo vyhodnocující elektroniky i senzory. U inkrementálního provedení se sleduje fyzické střídání severních a jižních magnet. pólů na libovolně dlouhé pásce, tím se v Hallových senzorech generuje střídavý impulsní nebo analogový elektrický signál a tím se zjišťuje relativní pohyb pásku vůči snímači. U absolutních snímačů se využívá speciální kolmá (perpendikulární) permanentní magnetizace částic pásky, který se ve vyhodnocovací elektronice snímače převádí na posloupnost binárních čísel.
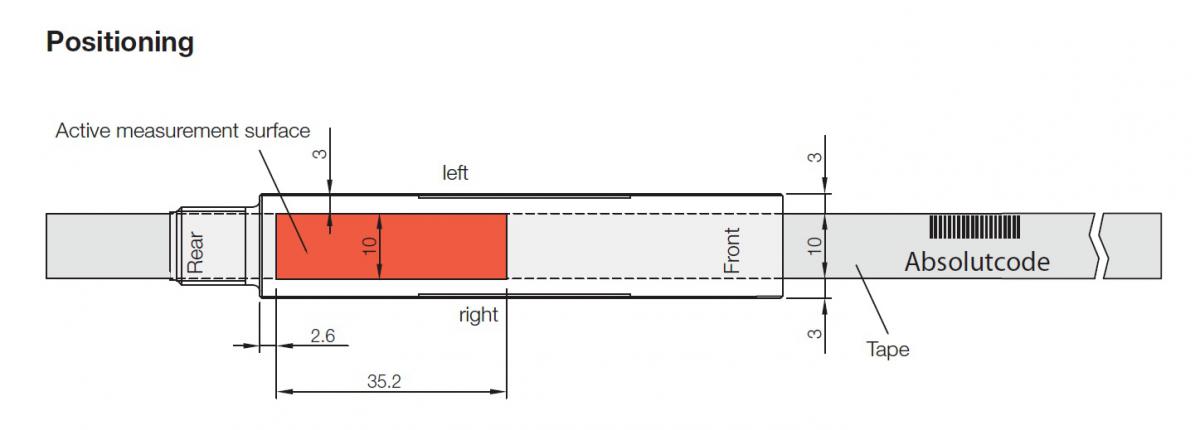
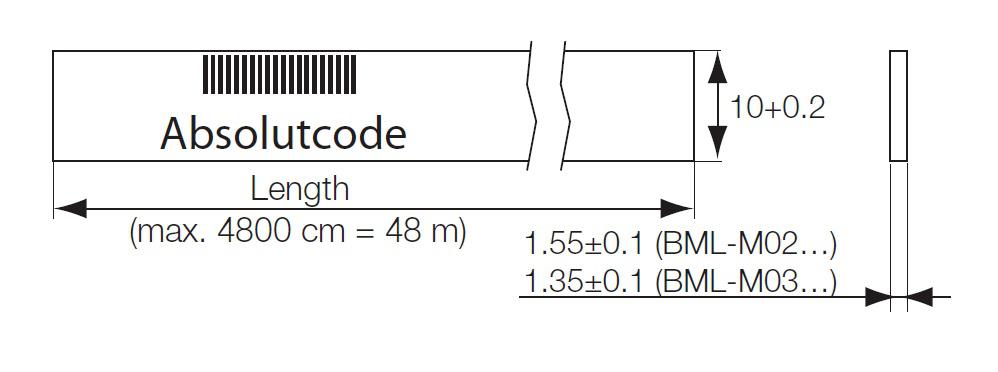
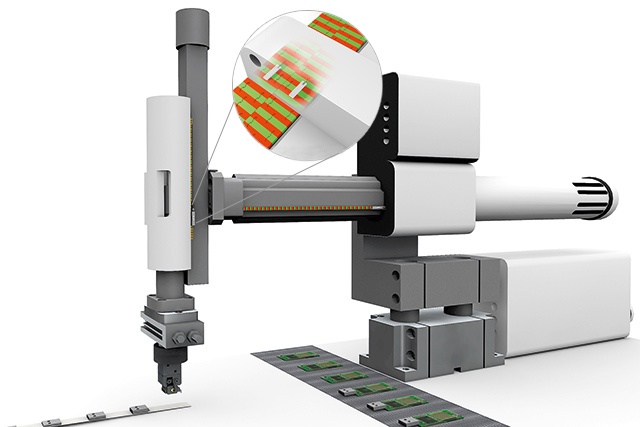
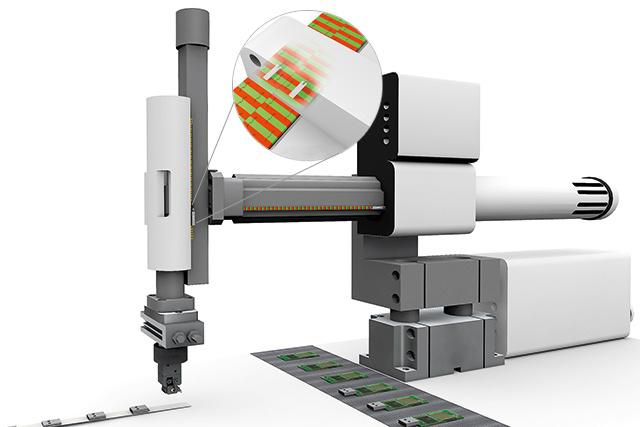
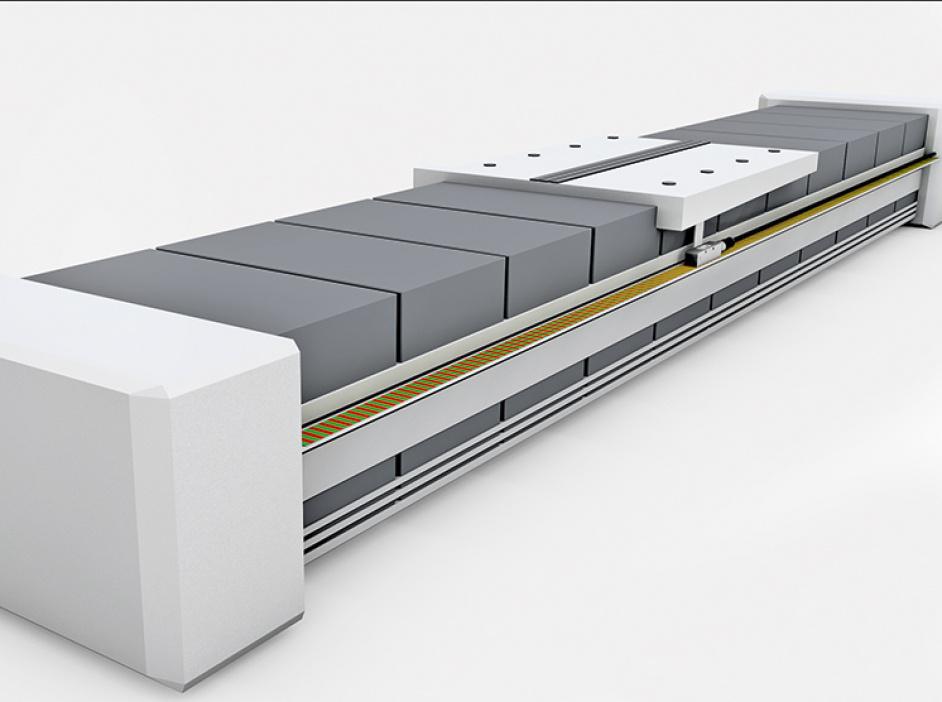
Rozměry a pozice snímací hlavy typu Balluff BML S1G a speciální magnetické pásky s absolutním kódováním.
Velkou výhodou aktuálních moderních magneticky kódovaných systémů jsou velmi malé zástavbové rozměry, které umožňují měření polohy či natočení přímo integrovat jako do vnitřku motoru (na hřídel), tak i vně na libovolný lineárně či rotačně se pohybující nosník. I díky velkému výběru různých měřicích těles lze pružně přizpůsobit různým požadavkům.
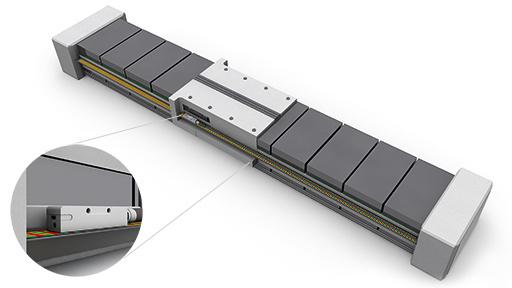

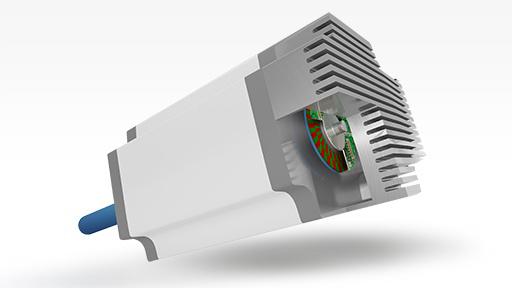
Linerární i rotační provedení magnetického enkodéru.
Absolutní magneticky kódované měření polohy Balluff BML
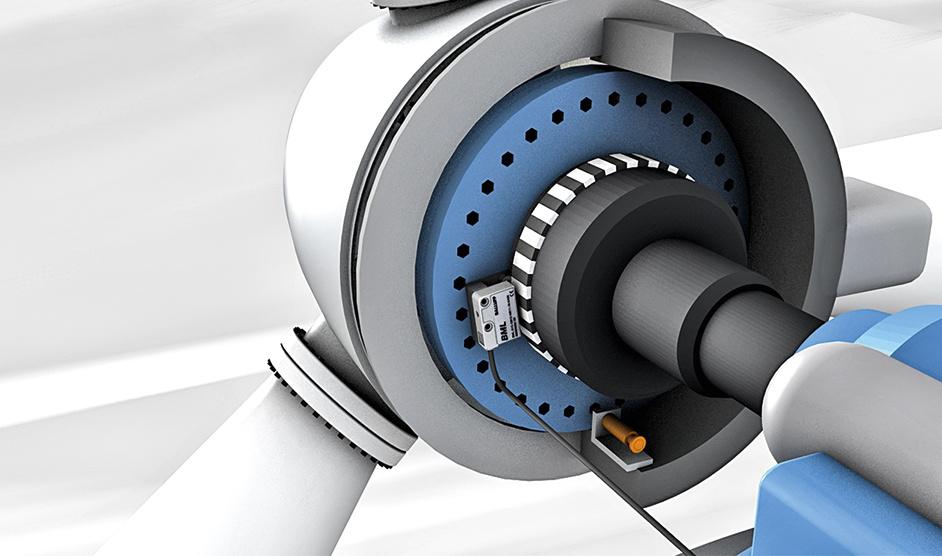
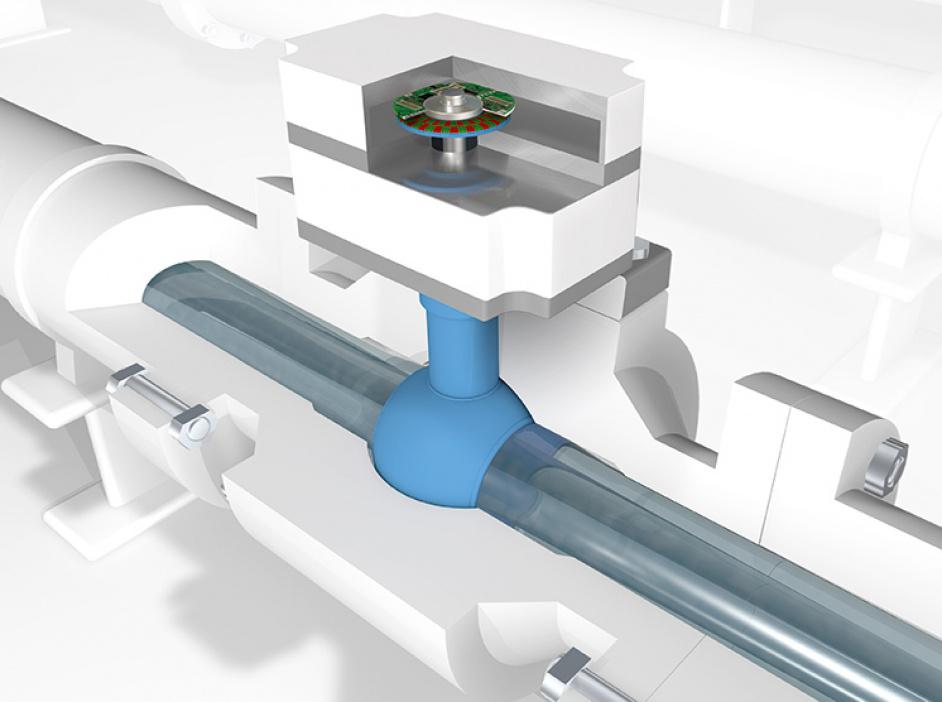
 Pro přímou integraci do lineárních a rotačních pohonů nabízí německá společnost Balluff magneticky kódované systémy měření dráhy a úhlu s označením BML. Díky malému provedení a nízké hmotnosti jsou minisenzory vhodné pro stísněné prostory a pro použití na pohyblivých ovladačích a osách, jako např. chapadlech, portálových nakladačích nebo aplikacích „pick and place“, kde každý gram uspořený na hmotnosti zlepšuje energetickou účinnost zařízení. S diskem absolutního kódování v kompaktním provedení je k dispozici jednoduše integrovatelné, vysoce přesné řešení absolutní zpětné vazby pro zjišťování skutečné polohy motorů a pohonů. U pohonů čerpadel je například v polohovém regulátoru nebo ve výkyvném pohonu integrovaný kódovací systém pro zpětnou vazbu polohy zaručuje přesný a procesně spolehlivý průtok. Možnost průchodu médií, protože snímač je umístěn je mimo osu.
Pro přímou integraci do lineárních a rotačních pohonů nabízí německá společnost Balluff magneticky kódované systémy měření dráhy a úhlu s označením BML. Díky malému provedení a nízké hmotnosti jsou minisenzory vhodné pro stísněné prostory a pro použití na pohyblivých ovladačích a osách, jako např. chapadlech, portálových nakladačích nebo aplikacích „pick and place“, kde každý gram uspořený na hmotnosti zlepšuje energetickou účinnost zařízení. S diskem absolutního kódování v kompaktním provedení je k dispozici jednoduše integrovatelné, vysoce přesné řešení absolutní zpětné vazby pro zjišťování skutečné polohy motorů a pohonů. U pohonů čerpadel je například v polohovém regulátoru nebo ve výkyvném pohonu integrovaný kódovací systém pro zpětnou vazbu polohy zaručuje přesný a procesně spolehlivý průtok. Možnost průchodu médií, protože snímač je umístěn je mimo osu.
 Magneticky kódované pásky Balluff využívají speciální kolmou (perpendikulární) permanentní magnetizaci. Proto poskytují absolutně homogenní magnetické pole, které zaručuje vysokou funkční spolehlivost a kvalitu nastavení měřítka. Měření lze provádět s přesností +/- 7 μm při rozlišení již od 1 μm při velmi pomalých pohybech i při rychlostech až 10 m/s. Aby toto bylo možné u absolutního systému měření, může být taktování přenosu ze snímače až 10 MHz, tedy informace o aktuální poloze je ve snímači "k dispozici" v řádu několika mikrosekund.
Magneticky kódované pásky Balluff využívají speciální kolmou (perpendikulární) permanentní magnetizaci. Proto poskytují absolutně homogenní magnetické pole, které zaručuje vysokou funkční spolehlivost a kvalitu nastavení měřítka. Měření lze provádět s přesností +/- 7 μm při rozlišení již od 1 μm při velmi pomalých pohybech i při rychlostech až 10 m/s. Aby toto bylo možné u absolutního systému měření, může být taktování přenosu ze snímače až 10 MHz, tedy informace o aktuální poloze je ve snímači "k dispozici" v řádu několika mikrosekund.
Přenos informace o polohy se ze snímacích magnetických hlav přenáší do nadřazeného kontroléru standardizovanými protokoly SSI nebo BiSS-C, které jsou podporovány různými výrobci PLC či řídících jednotek (obvykle nabízejí SSI nebo BiSS komunikační rozhraní ve formě speciální rozšiřujícího modulu). SSI přenosové rozhraní tvoří jednosměrný synchronní sériový přenos dat založený na RS485/RS422 systému s taktování maximálně 50 kHz. Formát dat je 16- nebo 18-bitový v binárním nebo Gray kódování. BiSS-C je také synchronní sériový přenos, ale již koncipován jako obousměrný (fullduplex) s taktováním přenosu až 10 MHz (tedy výrazně rychlejší měření pro rychlé změny polohy). Je tedy možné současně měnit nastavení snímače bez přerušení příjmu informace o aktuální poloze. Navíc BiSS-C podporuje i CRC opravný kód přenosu a vysílání informačních a chybových hlášení. Absolutní magneticky kódované snímače Balluff BML navíc ještě současně poskytují i v reálném čase vysílaný signál sin/cos (úroveň 1 Vpp) pro použití jako klasický inkrementální výstup.
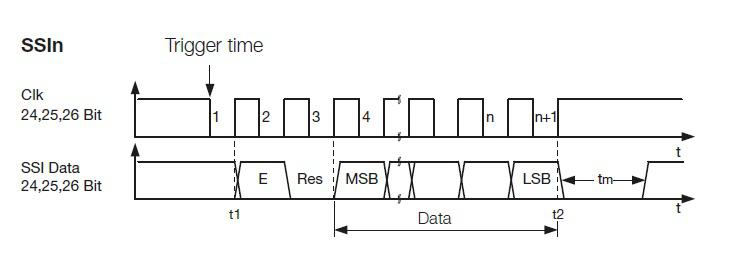
Sériová komunikace SSI - jednosměrný přenos absolutní hodnoty polohy enkodéru.
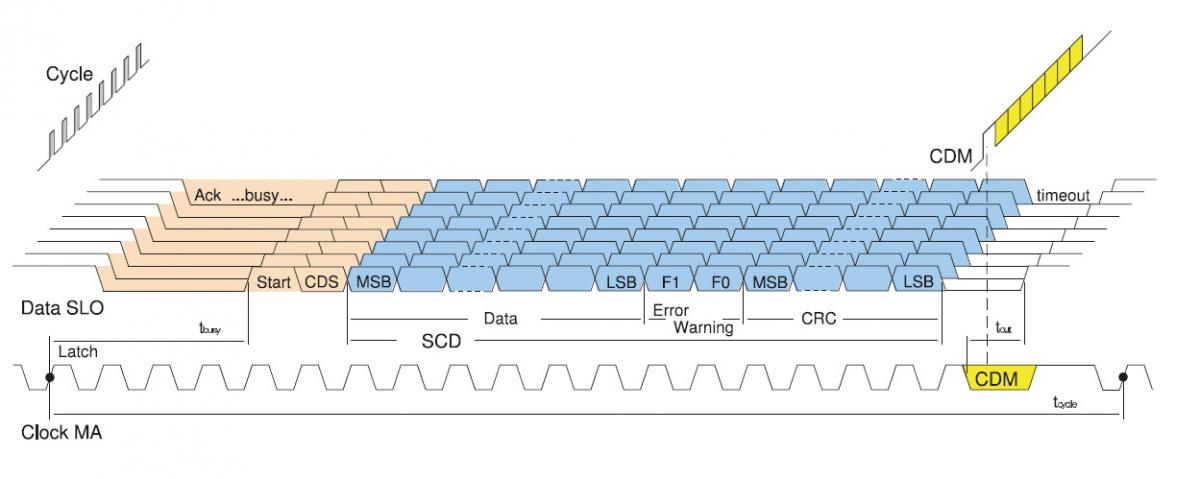
Sériová komunikace BiSS - obousměrná komunikace s absolutním enkodérem.
 Jako "základní" absolutního měření pro rotační motory / pohony jsou určeny velmi malé magneticky kódované systémy měření polohy BML-S1H v kovovém pouzdře, které se vejdou i do nejužšího montážního prostoru a výborně se hodí k individuální integraci do elektrických pohonů. Snímače BML-S1H pro měření dráhy v reálném čase s vysokou linearitou. Poskytují tak optimální zpětnou vazbu o poloze i v případě vysoce dynamických aplikací s pojezdovou rychlostí až 5 m/s s rozlišením 1 µm a přesností až ±7 µm v pro měřené vzdálenosti 64 mm (verze S1H-M3AA-xxx) nebo 256 mm (S1H-M3CA-xxx). Magnetická kódovaná páska v podobě magnetické gumy na nosné pásce z nerezové oceli pak má celkovou délku 91 mm, resp. 283 mm.
Jako "základní" absolutního měření pro rotační motory / pohony jsou určeny velmi malé magneticky kódované systémy měření polohy BML-S1H v kovovém pouzdře, které se vejdou i do nejužšího montážního prostoru a výborně se hodí k individuální integraci do elektrických pohonů. Snímače BML-S1H pro měření dráhy v reálném čase s vysokou linearitou. Poskytují tak optimální zpětnou vazbu o poloze i v případě vysoce dynamických aplikací s pojezdovou rychlostí až 5 m/s s rozlišením 1 µm a přesností až ±7 µm v pro měřené vzdálenosti 64 mm (verze S1H-M3AA-xxx) nebo 256 mm (S1H-M3CA-xxx). Magnetická kódovaná páska v podobě magnetické gumy na nosné pásce z nerezové oceli pak má celkovou délku 91 mm, resp. 283 mm.
Vrcholovou řadu pak představuje typ BML-S1G, který poskytuje 24- až 32-bitové kódování polohy v binárním nebo Grey kódu s rozlišením ~0.98 / 1 / 2 / 5 nebo 10 μm. Celková přesnost měření při měřené lineární vzdálenosti v rozsahu 10 mm až 48 m (48 000 mm) je +/- 20 μm. Další výhodou proti typu BML-S1H je i možnost větší vzdálenosti magnetické snímací hlavy od pásky až 0,8 mm (místo max. 0,35 mm u verze S1-H).

Příklady použití absolutní zpětné vazby měření polohy:
 roboti a robotická zařízení,
roboti a robotická zařízení,- obráběcí stroje,
- posunovací stoly,
- lineární vedení,
- etiketovací zařízení Pick-and-Place,
- plnící a zavírací stroje,
- přesné polohování výkyvného zařízení,
- atd.

Závěr
Absolutní magnetické enkodéry představují velmi zajimavou možnost pro dost přesné zpětnovazební zjišťování polohy v téměř každé automatizované pohybové aplikaci. V praxi mnoho problémů při regulaci vzniká vlivem ztráty informace řídící jednotky o tom, kde se vlastně její pohybující se části nachází, zvláště po provedení náhlého výpadku napájení. Často pak opětovné spuštěné stroje může vyvolat i velkou havárii, pokud například řídící jednotka si myslí, že manipulační rameno je v základní "Home" poloze a přitom vlivem nenadálého výpadku napájené skončilo v nějakém jiném mezistavu.
Tyto problémy lze sice obejít vhodným softwarovým "zabezpečením" takových stavů, ale často tento způsob může být velmi náročný a přesto si málo který programátor může být jistý, že nezapomněl nějaký takový stav ošetřit. Nebo lze použít absolutní enkodéry měření polohy, jejichž informace se nijak neztrácí a přesně v každou chvíli má řídící jednotka přesnou informaci, v jaké poloze se pohybující se části stroje nachází. Lze tedy kdykoliv libovolně pokračovat v přerušené činnosti nebo bezpečně a zaručeně přejet do úvodní pozice a začít znovu. Rozhodně se tak dají lépe pohlídat "hazardní stavy", které mohou i na dlouhou dobu omezit výrobu.
Odkazy:
- Stránky společnosti Balluff: http://www.balluff.com
- Přímé odkazy na stránky Balluff o měření polohy:
- http://www.balluff.com/local/cz/industry-area/applications/drive-technology/absolute-motor-feedback-in-realtime/
- http://www.balluff.com/local/cz/industry-area/applications/drive-technology/high-precision-position-feedback-for-rotary-and-swivel-drives/
- http://www.balluff.com/local/cz/industry-area/applications/drive-technology/exact-positioning-of-a-tool-pivoting-system/
- http://www.balluff.com/local/cz/industry-area/applications/drive-technology/optimal-position-feedback-for-direct-drives-up-to-48-m/
- Článek "Rotační enkodéry pro řízení pohonů a pohybu" na serveru automatizace.hw.cz
- Článek "Absolutní rotační enkodér s MODBUS rozhraním = LIKA EM58" na serveru automatizace.hw.cz



