
 V robotice a dnes vlastně již téměř ve všech aplikacích, kde se využívají pohony, je nutné zajistit přesné zjišťování momentální polohy natočení hřídele motoru, měřit úhlovou rychlost otáčení nebo zrychlení, aby bylo možné zajistit přesné řízení dané aplikace. V případě použití krokových motorů je možné přímo předem přesně určit a řídit pohyb, úhel natočení nebo rychlost otáčení bez nutnosti zpětné kontroly. U ostatních principů provedení motorů je to nutné zajistit použitím systému zpětné vazby, kdy se prakticky naslepo a nepřesně řídí pohyb motoru a až zpětně se vyhodnocuje o kolik, jak moc nebo jak rychle se vlastní pohyb uskutečnil. Existuje několik možných principů, jak lze vyhodnocení provést. Jednou z nich je použití tzv. rotačního optického enkodéru polohy hřídele (optical shaft encoder), kdy se využívá principu optické závory. Optická vazba optočlenu je zde vytvářena kotoučkem s průchozími nebo odraznými plochami připevněným na hřídeli řízeného motoru.
V robotice a dnes vlastně již téměř ve všech aplikacích, kde se využívají pohony, je nutné zajistit přesné zjišťování momentální polohy natočení hřídele motoru, měřit úhlovou rychlost otáčení nebo zrychlení, aby bylo možné zajistit přesné řízení dané aplikace. V případě použití krokových motorů je možné přímo předem přesně určit a řídit pohyb, úhel natočení nebo rychlost otáčení bez nutnosti zpětné kontroly. U ostatních principů provedení motorů je to nutné zajistit použitím systému zpětné vazby, kdy se prakticky naslepo a nepřesně řídí pohyb motoru a až zpětně se vyhodnocuje o kolik, jak moc nebo jak rychle se vlastní pohyb uskutečnil. Existuje několik možných principů, jak lze vyhodnocení provést. Jednou z nich je použití tzv. rotačního optického enkodéru polohy hřídele (optical shaft encoder), kdy se využívá principu optické závory. Optická vazba optočlenu je zde vytvářena kotoučkem s průchozími nebo odraznými plochami připevněným na hřídeli řízeného motoru.
Příklad soustavy rotačního optického enkodéru, řízeného motoru a ovládané mechanické soustavy (ramene).
Co je rotační enkodér ?
 Rotační senzory (enkodéry) jsou zařízení, která se obecně mohou použít v aplikacích, kde se měří délka, pozice, rychlost, úhel natočení nebo všechny veličiny, které na ně lze převést. Provádějí přeměnu mechanického pohybu na elektrické signály. Běžné rotační enkodéry se dělí na dvě skupiny:
Rotační senzory (enkodéry) jsou zařízení, která se obecně mohou použít v aplikacích, kde se měří délka, pozice, rychlost, úhel natočení nebo všechny veličiny, které na ně lze převést. Provádějí přeměnu mechanického pohybu na elektrické signály. Běžné rotační enkodéry se dělí na dvě skupiny:
- inkrementální - generují sled pulsů
- absolutní - produkují sled unikátních kódů
Konstrukčně jednodušší inkrementální provedení při rotačním pohybu generují pulsy, jejichž určitý počet odpovídá určité vzdálenost, posuvu nebo natočení a závislost počtu pulsů na časový úsek odpovídá rychlosti. Výstupní signál je tedy relativní a informuje jen o pohybu, ne však sám o sobě o přesné pozici. To případně na základě "startovací" pozice musí vyhodnocovat až externí měřící jednotka (například PLC). Konstrukčně složitější absolutní provedení již generují pro každou pozici natočení konkrétní číselnou hodnotu, tedy v každém momentě je přesně definováno v jakém úhlu natočení se enkodér nachází.
Dále lze rotační senzory rozdělit podle mechanické konstrukce upevnění na hřídel pohonu na:
- enkodéry s hřídelí
- bez hřídele - s dutinou
Verze s dutinou se začaly nabízet teprve před několika lety, ale v současné době se z důvodu snadnější montáže stávají stále více vyhledávanými. U nich je totiž napojení na systémy s vlastní hřídelí (např. motory) snadnější a odpadají spojky, ve kterých může navíc docházet k nechtěnému prokluzu mezi hřídelí stroje a senzoru.

Možnost připojení rotačních senzorů s hřídelí (vlevo) a s dutinou (vlevo).
Princip rotačního optického enkodéru pro měření natočení
Velmi stručně se dá uvést, že rotační enkodér (snímač) je elektromechanický převodník, který převádí rotační pohyb na sekvence elektrických digitálních impulsů. V případě zde popisovaného rotačního optického enkodéru je celý systém enkodéru složen z následujících hlavních částí:
 Disk s posloupností opticky průhledných (Translucent) a neprůhledných (Opaque) otvorů nebo odrazných a neodrazných plošek
Disk s posloupností opticky průhledných (Translucent) a neprůhledných (Opaque) otvorů nebo odrazných a neodrazných plošek- Optickým vysílačem (Light source) - nejčastěji diodou LED vysílající světlo ve viditelném nebo infračerveném spektru
- Optickým přijímačem (Photodetector) - fototranzistor nebo fotodioda
- Případně může být součástí enkodéru i optika pro zaostření optického paprsku
Princip funkce je zhruba následující: Disk je spojen s otočnou spojovací hřídelí enkodéru (shaft), která je pak v praxi připevněna k hřídeli motoru. Hřídel se tedy otáčí současně s diskem. Světlo vysílané světelným zdrojem (diodou LED), který je umístěn před diskem, může procházet diskem pouze průhlednými okénky (Translucent), zatímco zbývající část disku neprůhledná (Opaque), a pohlcuje světlo. Světelné impulsy vytvářené otáčením disku aktivují optický snímač, který je převádí na elektrické impulsy nebo obdélníkový signál. Aby bylo u snímače zajištěno generování obdélníkových impulsů bez rušení, musí být elektrický signál zesílen a elektronicky zpracován. Pro zlepšení kvality a stability výstupních signálů se může snímat v diferenciálním režimu, kdy se porovnávají dva téměř totožné signály s opačnou fází (tj. fázový rozdíl 180 elektrických stupňů). Snímání rozdílu dvou signálů odstraňuje souhlasné rušení, protože stejné signály libovolného tvaru se vždy překryjí.
Princip rotačního optického enkodéru.
V případě reflexních enkodérů jsou zdroj „světla” i jeho přijímač společně umístěny na jedné straně kolečka, na kterém jsou reflexní a matné plošky. Jejich střídání před přijímačem při otáčení kolečka na něm způsobuje změny napětí v důsledku změny množství detekovaného světla. Provedením prahování napětí na přijímači se získá obdélníkový signál, kde každý obdélník odpovídá jedné reflexní či matné ploše. Při jejich rovnoměrném rozmístění po obvodu kolečka odpovídá jeden obdélník otočení vždy o shodný počet stupňů.
Enkodérům generující takovýto pravidelný obdélníkový signál říkáme inkrementální. Mimo výše popsaných inkrementálních enkodérů existují i tzv. absolutní. Zatím co inkrementální enkodéry pouze detekují změnu polohy o pevně daný minimální krok, absolutní enkodéry nám říkají přímo polohu v rámci 360 stupňů. Toho je dosaženo zakódováním každé polohy natočení kotouče, tzn. že každému určitému úhlovému rozsahu odpovídá určitá jedinečná kombinace impulsů.
Princip absolutního optického rotačního enkodéru (1= hřídel enkodéru, 2 = zdroj světla, 3 = 8 optických přijímačů).
Absolutní enkodéry v optickém provedení však potřebují větší počet optických přijímačů, jejichž počet odpovídá požadovanému rozlišení. Nejběžnější je provedení, kde kotouč (l) obsahuje 8 paralelních drah, což znamená rozlišení 8 bitů. Pro detekci je tak potřeba jeden zdroj světla a 8 optických přijímačů, kde každý má vlastní dráhu. Pak například informace o natočení může být binární posloupnost 11001110. Jinou možností realizace je princip, kdy všechny optické přijímače jsou za sebou na kraji kotouče a informace o poloze je dána pomocí jednoznačného kódu. Pro osm poloh a tři senzory by to mohlo být např. 000 001 010 101 011 111 110 100 a na kolečku by bylo 00010111 (v případě tří senzorů a osmi poloh, ale pouze relativní informace bychom získali rozlišení 24 místo 8).
Vyhodnocení signálu z inkrementálního enkodéru
Inkrementální enkodér obvykle generuje dva obdélníkové průběhy, vzájemně posunuté o 90 elektrických stupňů, které se nazývají kanál A a kanál B. Zpracováním samotného kanálu A lze získat informaci o rychlosti otáčení, pomocí druhého kanálu je možné podle sekvence stavů generovaných oběma kanály rozeznat i směr otáčení. K dispozici je ještě další signál, nazývaný Z nebo také nulový kanál, který udává referenční (nulovou) polohu hřídele enkodéru. Tento signál je obdélníkový a ve fázi s kanálem A.
Provedení inkrementálního enkodéru s detekcí směru pohybu a definovaným počátkem.
Princip detekce směru otáčení kotouče enkodérů prostřednictvím použití dvou kanálů A a B.
Samotná posloupnost dvou, případně tří, obdélníkových signálů z inkrementálního enkodéru však není z pohledu vyhodnocení nebo zobrazení až tak ideální. Nejjednodušší způsob, jak provést převod z uvedených signálů na jednoduše srozumitelné číslo, je použití čítače s možností čítání nahoru a dolu. Dnes je pro tyto účly ideální použít téměř libovolné PLC, které má pro tyto účely již obvykle připravené speciálné rychlé čítací vstupy a v programu speciální blokové funkce (viz například články "Připojení a funkce inkrementálního enkodéru na PLC Millenium3" a TEST - Kompaktní PLC Omron CP1L – 4. díl – rychlé vstupy pro enkodér).
Příklad blokvé funkce PLC převodu výstupního signálu z inkrementálního enkodéru pomocí čítače.
Kódování signálu u absolutních enkodérů
Narozdíl od inkrementálních enkodérů je zde kódováním, kdy každé pozici natočení kotouče, resp. hřídele, přesně dán směr pohybu i jeho počátek. Nejběžněji se využívá dvou typů kódování:
- Standardního binárního kódování (Standard Binary Encoding)
- Grayův kód (Gray coding)
První kód je klasický, principiálně jednoduchý a lehce srozumitelný, ale prakticky v případě enkodérů nevýhodný. Standardní binární kód je v případě enkodérů totiž velmi náchylný na generování tzv. hazardních stavů, kdy například při přechodu ze binárního stavu 01 na nejbližší následující stav 10 může být na kotouči krátce generován stav 00. Za to může nejen nedokonalé provedení kolečka enkodéru, ale někdy i optické jevy typu odrazu, ohybu nebo stínu světla procházejícího přes kotouč od vysílače (LED) k přijímači (fotodioda). Pravděpodobnost náhodných nebo i systematických vzniků hazardů je tím větší, čím víc bitů má kód, tedy čím má enkodér vyšší rozlišení (jemnější dělení kotouče = rozsahu 360°). Dnes se lze setkat až s 32-bitovým kódováním u velmi přesných snímačů a 16-bitové kódování již je běžné.
Uvedený problém vzniku hazardních stavů se pak musí tedy prakticky vyřešit ve snímací elektronice enkodéru. Nejjednodušeji to lze provést například metodou taktování signálu, resp. jeho synchronizací s nějakým hodinovým signálem odvozeným od rychlosti otáčení. V praxi při použití absolutního enkodéru však není nutné se o tento problém vůbec starat, protože vše je rešeno uvniř každého enkodéru v rámci standardizované komunikačního rozhraní, dnes prakticky téměř vždy v podobě jednosměrné synchronní sériové komunikace SSI nebo rychlejší a obousměrné sériové synchroní komunikace BiSS-C.
|
Sektor |
Snímač 1 |
Snímač 2 |
Snímač 3 |
Úhel |
|---|---|---|---|---|
|
1 |
log. 0 |
log. 0 |
log. 0 |
0° to 45° |
|
2 |
log. 0 |
log. 0 |
log. 1 |
45° to 90° |
|
3 |
log. 0 |
log. 1 |
log. 0 |
90° to 135° |
|
4 |
log. 0 |
log. 1 |
log. 1 |
135° to 180° |
|
5 |
log. 1 |
log. 0 |
log. 0 |
180° to 225° |
|
6 |
log. 1 |
log. 0 |
log. 1 |
225° to 270° |
|
7 |
log. 1 |
log. 1 |
log. 0 |
270° to 315° |
|
8 |
log. 1 |
log. 1 |
log. 1 |
315° to 360° |
Příklad stavů u 3-bitového standardního binárního kódování.
|
Sektor |
Snímač 1 |
Snímač 2 |
Snímač 3 |
Úhel |
|---|---|---|---|---|
|
1 |
log. 0 |
log. 0 |
log. 0 |
0° to 45° |
|
2 |
log. 0 |
log. 0 |
log. 1 |
45° to 90° |
|
3 |
log. 0 |
log. 1 |
log. 1 |
90° to 135° |
|
4 |
log. 0 |
log. 1 |
log. 0 |
135° to 180° |
|
5 |
log. 1 |
log. 1 |
log. 0 |
180° to 225° |
|
6 |
log. 1 |
log. 1 |
log. 1 |
225° to 270° |
|
7 |
log. 1 |
log. 0 |
log. 1 |
270° to 315° |
|
8 |
log. 1 |
log. 0 |
log. 0 |
315° to 360° |
Příklad stavů u 3-bitového Grayova kódování.

Příklad provedení kolečka kódování ve 4-bitovém standardním kódu (vlevo) a 3-bitovém Grayově kódu (vpravo). V praxi jsou však dnes běžná 16- až 32-bitová kódování.
Příklad reálného inkrementálního provedení optického enkodéru
Jako takový praktický příklad reflexních optických rotačních enkodérů pro malé motory jsem použil enkodér Omron E6C1-CWZ6W. Na kotouček zde opatřený odraznými plochami svítí LED dioda a odražené světlo je pak snímáno přes fokusační optiku několika fotodiodami a následný elektrický signál zpracován a vyslán jako klasický obdélníkový dvoukanálový signál na vývody A, B a Z.
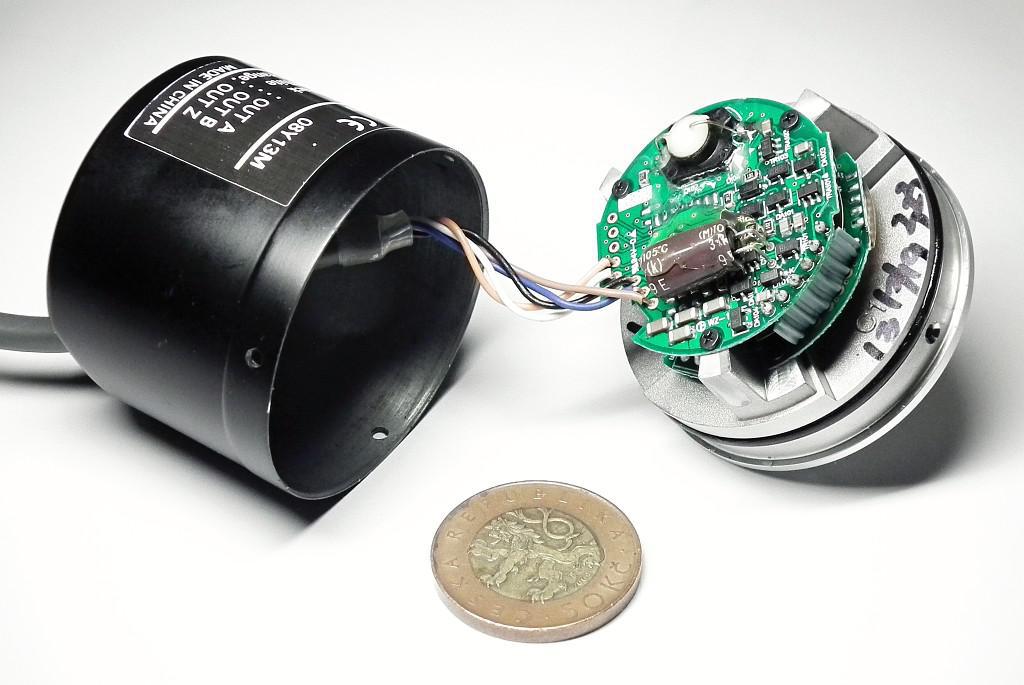
Příklad provedení a funkce reálného malého enkodéru Omron E6C1-CWZ6W.

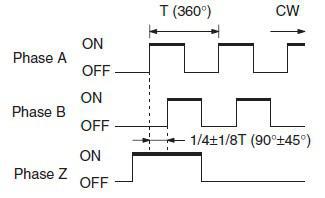
Zapojení vývodů a tvar výstupních signálů A, B a Z rotačního enkodéru Omron E6C1-CWZ6W.
Závěr
Enkodéry jsou dnes již běžnou součástí motorů v aplikacích, kde je potřebné přesné nastavení polohy nebo měření rychlosti otáčení klasických analogových motorů. Mimo rotační provedení enkodérů je možné se setkat také s lineárním provedením pro lineární motory. Cílem tohoto článku bylo obecně a jednoduše přiblížit / připomenout princip a funkci tohoto zařízení.
Odkazy
- Článek "Novinka - Odolné inkrementální enkodéry Kuebler Sendix 5000" na serveru automatizace.hw.cz
- Článek "Levný robustní rotační snímač polohy - LIKA I65" na serveru automatizace.hw.cz
- Článek "Absolutní rotační enkodér s MODBUS rozhraním = LIKA EM58" na serveru automatizace.hw.cz
- Článek "Připojení a funkce inkrementálního enkodéru na PLC Millenium3" na serveru automatizace.hw.cz
- Článek "Převodník výstupu inkrementálních enkodérů na Modbus" na serveru automatizace.hw.cz
- Článek "TEST - Malý odolný rotační snímač OMRON E6C2-CWZ6C" na serveru automatizace.hw.cz
- Článek "TEST - Kompaktní PLC Omron CP1L – 4. díl – rychlé vstupy pro enkodér" na serveru automatizace.hw.cz



