1. Úvod
Tento dokument obsahuje srovnání různých implementací plně funkčního systému pro řízení pohybu a předpokládá předchozí znalost architektury systémů pro řízení pohybu a různých komponent, ze kterých se takové systémy skládají, jako je například operační systém reálného času a obvody FPGA.
2. Komponenty systému pro řízení pohybu
Systém pro řízení pohybu se skládá z různých komponent, které spolupracují na úkolech nezbytných pro řízení pohybu.
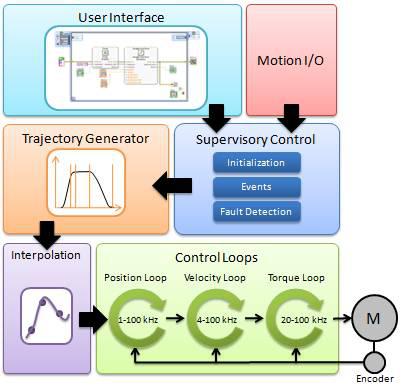
Obrázek 1. Architektura systému pro řízení pohybu
V závislosti na složitosti celé aplikace vyžaduje každý z těchto úkolů větší či menší míru sofistikovanosti. Systém NI SoftMotion umožňuje modularizaci těchto úkolů, takže mohou být implementovány v různých komponentách systému, v závislosti na požadavcích aplikace a na hardwaru, ze kterého se systém skládá.
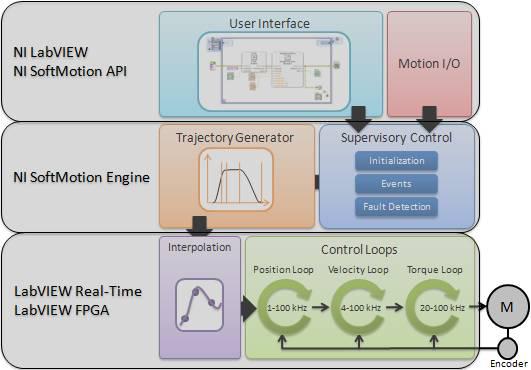
Obrázek 2. Architektura NI SoftMotion
Výsledkem je flexibilní systém pro řízení pohybu, který abstrahuje větší část výše uvedené architektury, ale zároveň Vám dává možnost upravovat do hloubky jednotlivé části, při zachování interakce s dalšími komponentami na nejvyšší úrovni.
Flexibilita systému NI SoftMotion, ve spojení s architekturou NI Reconfigurable I/O (RIO), dovolují vytvářet systémy s mnoha různými konfiguracemi. Tento dokument shrnuje různé přístupy, které můžete použít při stavbě systému pro řízení pohybu s komponentami NI. Také vysvětluje, jak každý z uvedených systémů implementuje výše zobrazenou architekturu pro řízení pohybu.
3. Distribuované řízení pohybu přes sběrnici EtherCAT
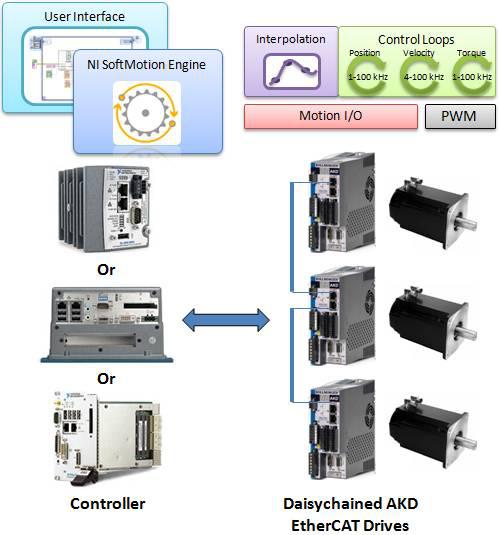
Obrázek 3. Systém pro řízení pohybu s pohonem EtherCAT Drive
Kontrolér reálného času od NI, ve spojení s řídicí jednotkou AKD na EtherCAT, je nejjednodušší volbou z pohledu kabeláže a konfigurace. Jde také o kombinaci s nejvyšším výkonem.
Kontrolér reálného času může být kterýkoliv kontrolér NI, který může fungovat jako EtherCAT Master (NI CompactRIO, PXI RT, kontrolér NI Industrial či Embedded Vision System) a zároveň na něm může běžet uživatelský kód a NI SoftMotion Engine. Kontrolér je připojen přes sběrnici EtherCAT (používá stejný kabel typu CAT 5, jako kterákoliv síť typu Ethernet) k řídicí jednotce AKD, která řeší interpolaci řídicích signálů, běží v ní řídicí smyčky, umožňuje připojení vstupně výstupních signálů (dorazy, základní poloha a bezpečnostní vypínače) a generuje řídicí signály pro motor.
Výhodami takové konfigurace systému jsou snadná rozšiřitelnost a implicitní synchronizace. Když je do systému přidávána další osa, dochází k řetězení pohonů, jak vidíte na obrázku výše. A protože systém používá sběrnici EtherCAT, je každý přidaný pohon automaticky synchronizován s dalšími komponentami systému.
LabVIEW a modul LabVIEW NI SoftMotion podporují řídicí jednotky NI AKD EtherCAT a umožňují kompletní konfiguraci projektu. Díky tomu mohou zákazníci sestavit, nakonfigurovat a validovat kompletní systém pro řízení pohybu z projektu v LabVIEW a mohou vyvinout svou vlastní aplikaci pro řízení pohybu s použitím NI SoftMotion API.
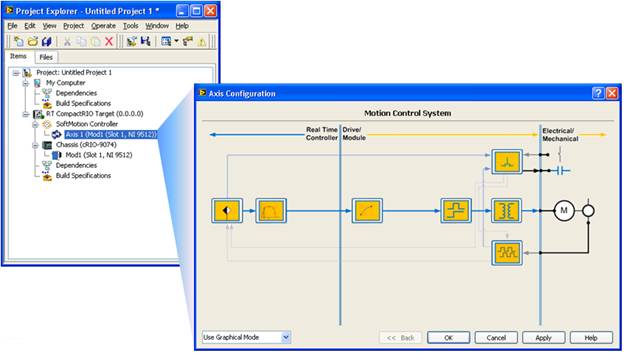
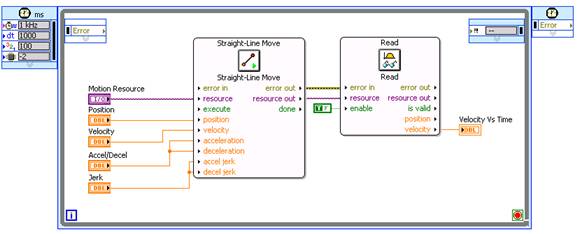
Obrázek 4. Konfigurace projektu a NI Softmotion API.
National Instruments také nabízí podporu EtherCAT pohonů dalších výrobců prostřednictvím rozhraní pro osy, které vyžaduje vlastní implementaci komunikace ze strany zákazníka. Několik ukázkových implementací je k dispozici na webových stránkách NI.
4. Rozšiřující šasi NI 9148 a rozhraní k řídicím jednotkám řady C

Obrázek 5. Systém na bázi šasi NI 9148 s Ethernetem
Pro jednoduché úkoly z oblasti řízení pohybu můžete aplikaci na bázi NI SoftMotion provozovat také na hostitelském počítači s Windows, který je připojen k rozšiřujícímu šasi NI 9148 Ethernet RIO s modulem řady C pro řízení pohonu. Při použití tohoto přístupu je NI SoftMotion engine nasazen přímo do systému NI 9148 pro spolehlivý běh aplikace pro řízení pohybu. Uživatel tak nemusí vytvářet aplikaci reálného času. Uživatelská aplikace běží přímo na hostitelském počítači s Windows a posílá příkazy s pozicí přímo na modul pro připojení pohonu prostřednictvím RIO Scan Engine. Výhodou této implementace je jednoduchost programování aplikací pro operační systém Windows. Dále nabízí spolehlivé řízení pohybu se zpětnou vazbou, která je uzavřena na hardwaru uvnitř modulu řady C.
Modul s rozhraním pro pohony lze připojit k jakémukoliv kompatibilnímu pohonu jiného výrobce a systém 9148 může řídit pohyb až v 8 osách (1 osa na jeden modul pro připojení pohonu). Velikou výhodou této hardwarové konfigurace je možnost programovat aplikace pro operační systém Windows a zároveň dosáhnout spolehlivého a deterministického běhu aplikace. Výhodu představuje také možnost přidat kterýkoliv z více než 100 modulů řady C, od NI a dalších výrobců, pro snadnou integraci dalších typů vstupně výstupních signálů do aplikace pro řízení pohybu.
5. Systémy na bázi CompactRIO
Pro aplikace, které vyžadují vyšší míru determinismu či které mají fungovat autonomně, mohou uživatelé použít systém CompactRIO Real-Time a snadno přenést svou aplikaci ze šasi NI 9148 RIO na kontrolér reálného času.
V závislosti na výkonových požadavcích motorů a úrovni přístupu k řídicí smyčce, který aplikace vyžaduje, mohou uživatelé volit mezi moduly řady C a řídicími jednotkami řady C. Moduly pro připojení pohonů slouží k propojení systému NI CompactRIO s externím pohonem, zatímco řídicí jednotky řady C již obsahují výkonovou elektroniku a umožňují přímé připojení ke krokovým motorům či servo motorům s nižším výkonem. Existuje také třetí možnost, která se nazývá rozhraní pro osy, a která umožňuje úpravu implementace řídicích algoritmů v obvodu FPGA a použití standardních vstupně výstupních modulů NI.
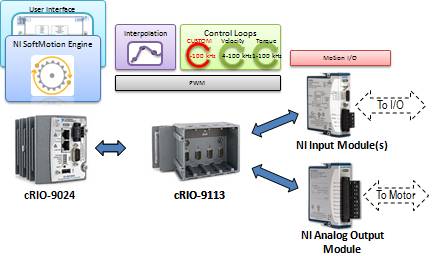
5.1. Moduly řady C pro připojení pohonů
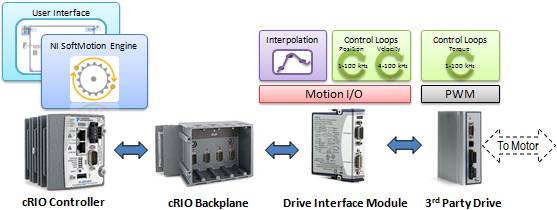
Obrázek 6. cRIO a rozhraní řady C pro pohony
Moduly NI 951x řady C pro NI CompactRIO umožňují přímé připojení ke stovkám řídicích jednotkek pohonů s krokovými motory či servo motory. Tyto moduly poskytují rozhraní k připojení signálů pro krokové či servo motory s jednou osou a dovolují tak připojit systém CompactRIO k externí řídicí jednotce. Kromě toho nabízejí kompletní sadu vstupně výstupních signálů, souvisejících s řízením pohybu a umožňují tak připojit koncové spínače, inkrementální enkodéry pro zpětnou vazbu o pozici a digitální vstupně výstupní signály. Rozhraní k řídicím jednotkám pohonů NI 951x obsahuje také procesor, použitý pro výpočet interpolace pohybu a implementující patentovaný algoritmus NI pro generování kroků.
Tato podoba systému je nejvhodnější pro připojení stávajících pohonů třetích stran a nabízí stejné možnosti rozšiřování o další typy vstupně výstupních signálů s již dříve zmíněnými moduly řady C.
Společnost National Instruments nabízí kabely pro přímé připojení modulů s rozhraním pro pohony k externím krokovým pohonům (P7000) a servo pohonům (AKD), které National Instruments také nabízí. Pro připojení k pohonům jiných výrobců jsou k dispozici kabely s konektorovými bloky. Navštivte webové stránky pro další informace o modulech řady C s rozhraním pro řídicí jednotky pohonů, kde navíc zjistíte, který z nich se nejvíce hodí pro účely Vaší aplikace.
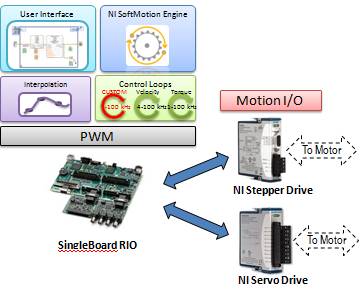
5.2. Řídicí jednotky pohonů řady C
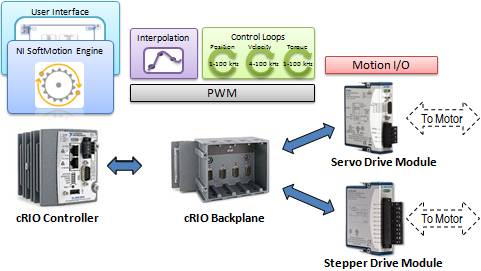
Obrázek 7 Systém na bázi cRIO a pohonů řady C
Pro motory s výkonem zhruba do 100 W nabízí National Instruments pohonné moduly řady C, které dokážou přímo poskytovat proud pro cívky v motoru. V tomto případě není vyžadován žádný externí pohon a všechny řídicí algoritmy jsou implementovány v obvodu FPGA.
Tento systém má výhodu v tom, že integruje řídicí jednotku pohonů přímo do šasi systému cRIO a eliminuje tak další kus hardwaru a mnoho dodatečné kabeláže.
5.3. Rozhraní pro osy
Obrázek 8. Systém využívající rozhraní pro osy k vytvoření vlastní řídicí smyčky, s použitím standardních NI modulů řady C
Kromě autonomního provozu Vaší řídicí aplikace dává nasazení na systém reálného času CompactRIO také prostor pro další přizpůsobení potřebám aplikace. Pokud Vaše aplikace vyžaduje speciální zpětnou vazbu či pokročilé řídicí algoritmy pro řízení pozice, můžete tuto část algoritmu přesunout do obvodu FPGA a použít programování LabVIEW FPGA, pro úpravu či nahrazení algoritmů vlastní implementací. Potom také máte možnost použít standardní vstupně výstupní moduly od NI, či jiných výrobců, pro připojení ke speciálním enkoderům, jako jsou například enkodéry EnDAT. Můžete také implementovat aplikace s více než 8 osami, za použití vstupních a výstupních modulů s vysokým počtem kanálů. Tato implementace vyžaduje dodatečné moduly pro LabVIEW, jako jsou například LabVIEW Real-Time a LabVIEW FPGA.
6. NI SingleBoard RIO
Obrázek 9. Systém na bázi NI Singleboard RIO
Pokud hledáte řešení s malými rozměry a plánujete nasazení svého řídicího systému ve větším množství, můžete stejný systém pro řízení pohybu implementovat na systému NI SingleBoard RIO, což je verze systému NI CompactRIO bez vnějšího krytí. Tato platforma vyžaduje vlastní řešení šasi a certifikace a implementace bezpečnostních prvků je tak ponechána na zákazníkovi. Díky tomu představuje cenově efektivnější řešení pro systémy nasazované ve velkých objemech. Většina NI modulů řady C, včetně modulů pro připojení řídicích jednotek pohonů a pohonných modulů, je také k dispozici ve verzi v podobě desky.
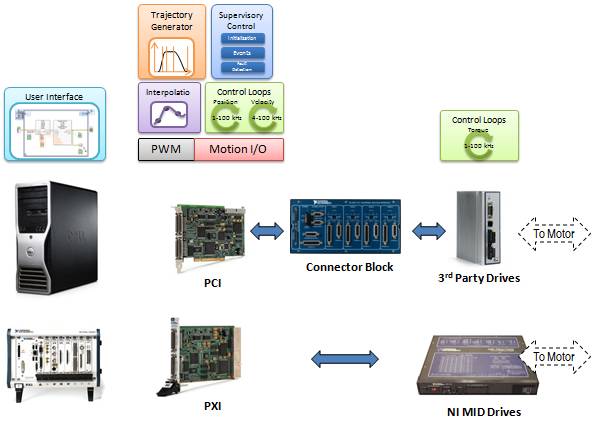
7. Zásuvné karty PCI či PXI
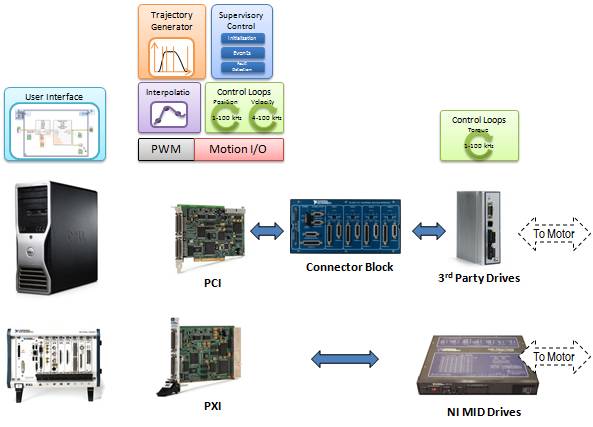
Obrázek 10. Systémy pro řízení pohybu na bázi PCI a PXI
National Instruments nabízí také zásuvné desky pro řízení pohybu pro sběrnice PCI a PXI. Tyto kontroléry obsahují na desce obvody DSP a FPGA, díky kterým dokážou zvládnout většinu úloh v systému pro řízení pohybu. Rozhraní Universal Motion Interface (UMI) lze použít k připojení krokových a servo pohonů třetích stran, případně je možné přímé připojení krokových a servo pohonů MID od National Instruments. Zásuvné karty pro řízení pohybu se skvěle hodí k rozšíření stávajícího stolního či PXI systému o řízení pohybu.
8. Závěr
Společnost National Instruments nabízí řešení pro řízení pohybu v široké škále aplikací, od jednoduchého řízení v jedné ose až po distribuované synchronizované systémy s větším počtem os.
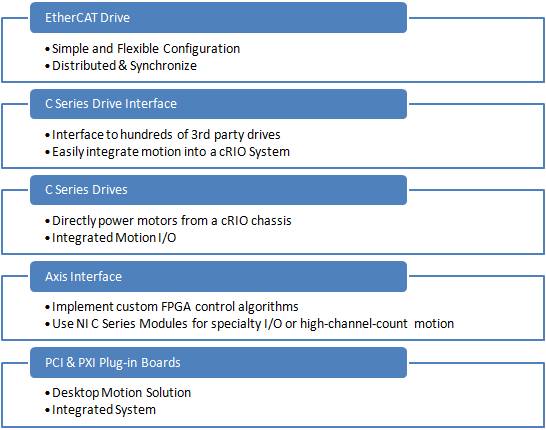
Obrázek 11. Možnosti systému NI pro řízení pohybu: každá varianta zahrnuje několik komponent, titulek je zvolen podle charakteristické části.
Technologie NI SoftMotion, ve spojení s architekturou NI Reconfigurable I/O (RIO), je základem, na kterém lze stavět různé varianty těchto systémů, a umožňuje hladkou integraci řízení pohybu s dalšími typy vstupně výstupních signálů. Více informací o výše uvedených systémech a dalších možnostech naleznete na ni.com/motion.
National Instruments (Czech Republic), s.r.o.
Sokolovská 136D, 186 00 Praha 8,Česká republika
Tel: +420 224 235 774
Fax: +420 224 235 749
E-mail: ni.czech@ni.com
CZ: 800 267 267
SK: 00 800 182 362



