
K čemu je potřeba chytré nabíjení (Smart Charging)?
 Infrastruktura nabíjení elektrovozidel prožívá vlivem ekologických i politických hledisek velký boom. Nejde tu však jen o automobily, ale i o další dopravní prostředky, jako jsou autobusy (elektrobusy), dodávková a nákladní vozidla. Současné nabíjení velkého množství vozidel není úplně triviální záležitost a regulace celé sítě nabíječek CP (Charger Point) vyžaduje poměrně náročnou regulaci. A to zejména v případě, kdy se současně kombinuje více energetických zdrojů, než je klasický jeden přípojný bod do elektrické sítě (Grid Connection). Například jedna lokální struktura několika nabíječek CP může obsahovat mimo zmíněnou elektrickou přípojku i vlastní zdroje energie, jako jsou solární panely, malé větrné elektrárny a i záložní systémy jako různá bateriová úložiště BESS (Battery Storage).
Infrastruktura nabíjení elektrovozidel prožívá vlivem ekologických i politických hledisek velký boom. Nejde tu však jen o automobily, ale i o další dopravní prostředky, jako jsou autobusy (elektrobusy), dodávková a nákladní vozidla. Současné nabíjení velkého množství vozidel není úplně triviální záležitost a regulace celé sítě nabíječek CP (Charger Point) vyžaduje poměrně náročnou regulaci. A to zejména v případě, kdy se současně kombinuje více energetických zdrojů, než je klasický jeden přípojný bod do elektrické sítě (Grid Connection). Například jedna lokální struktura několika nabíječek CP může obsahovat mimo zmíněnou elektrickou přípojku i vlastní zdroje energie, jako jsou solární panely, malé větrné elektrárny a i záložní systémy jako různá bateriová úložiště BESS (Battery Storage).
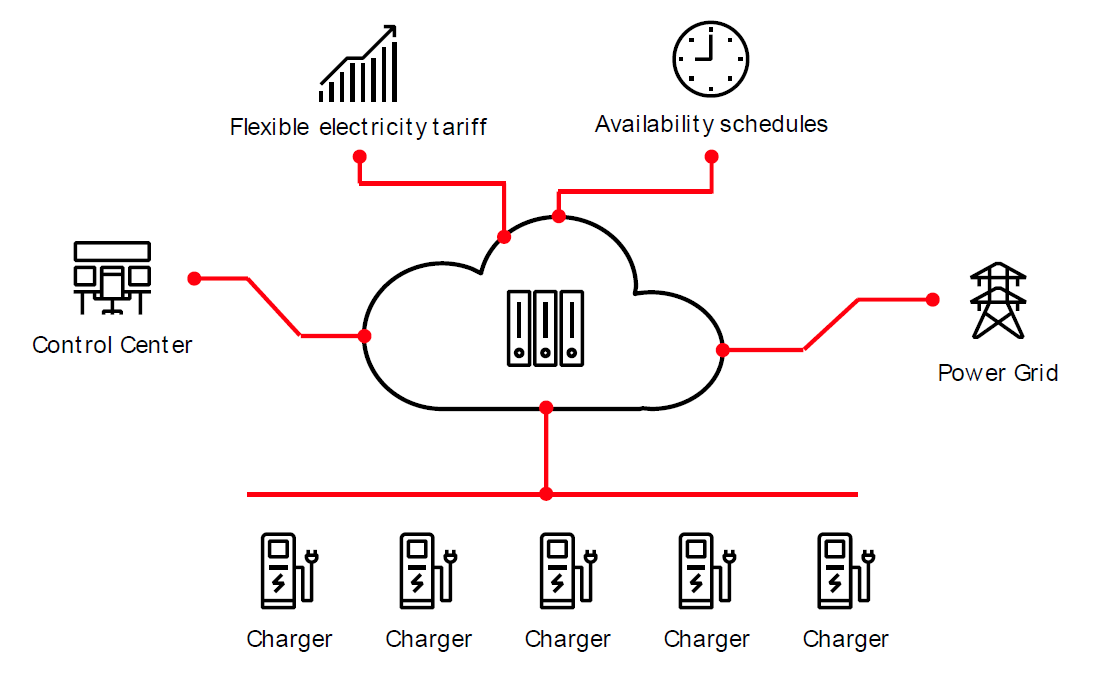
V zájmu co největší energetické i finanční efektivnosti je pro provozovatele takové struktury nabíjecích stanic zajímavé regulací maximalizovat použití uvedených vlastních zdrojů, když je v nich aktuálně energie dostupná. Tedy je dobré sledovat výkon například vlastních solárních panelů a také jejich prostřednictvím nabitá bateriová úložiště a potřeby na straně nabíjení vozidla a vhodnými algoritmy tok energie v reálném čase regulovat. Ještě vyšší úroveň regulace je pak predikce / plánování budoucích požadavků energie na straně nabíjecích stanic společně s predikcí budoucího množství energie z obnovitelných zdrojů na základě předpovědí počasí i ceny energie v síti a podle těchto informací vhodně celou soustavu ekonomicky i energeticky optimalizovat.
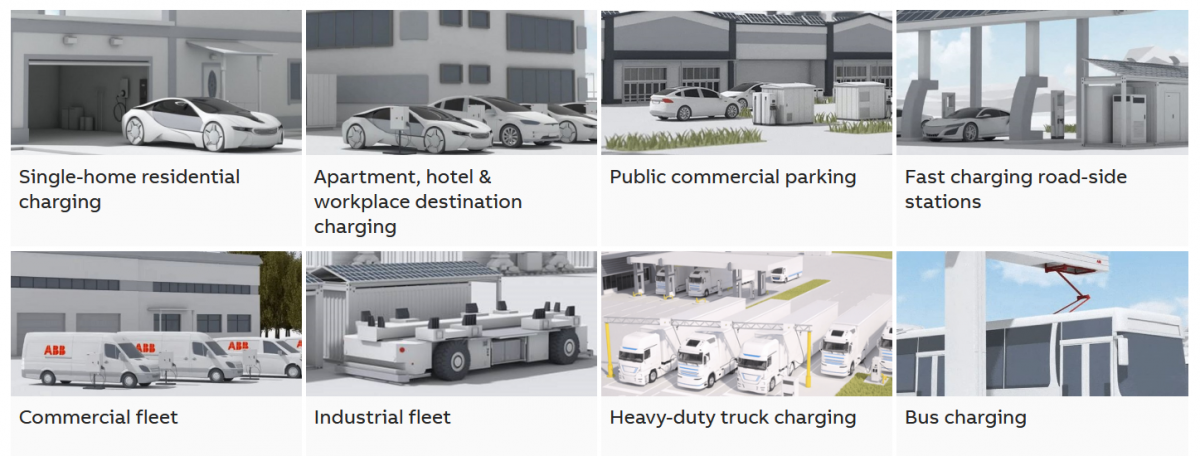
Existuje několik úrovní, jak lze Smart Charging realizovat. Primárním měřítkem bývá počet a struktura provozovaných nabíjecích stanic a pak také jaká rychlost a složitost plánování nabíjení je potřeba.
Struktura systému chytrého nabíjení
Základní struktura každého moderního nabíjecího systému elektrovozidel se skládá z následujících části:
 EV (Electric Vehicle) - elektro vozidlo, jehož baterie mají být nabíjeny.
EV (Electric Vehicle) - elektro vozidlo, jehož baterie mají být nabíjeny.- CP (Charger Point) - nabíjecí stanice (nebo-li nabíječka) obvykle v podobě nějakého "sloupku" s jednou čí více nabíjecími zásuvkami, informačním a identifikačním terminálem.
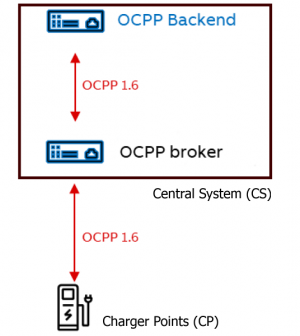
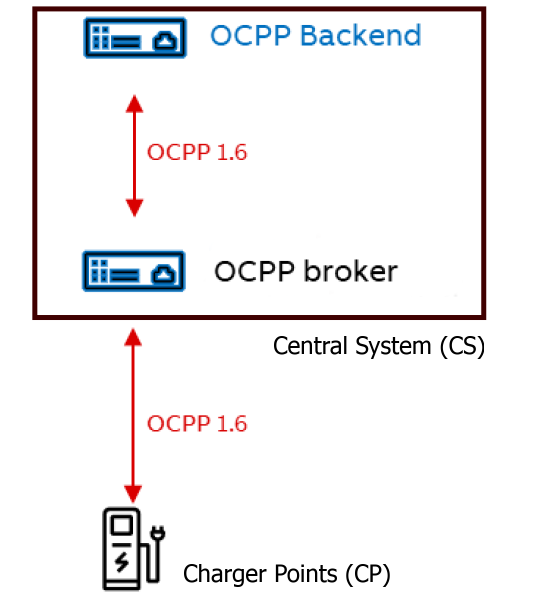
- CS (Central Station) - hlavní nabíjecí řídicí a účtovací systém, který může být v podobně jedné hardwarové jednotky s příslušným řídicím softwarem (aplikací) nebo rozdělen na několik podsystémů, nejčastěji na:
- OCPP broker - řídí základní nabíjecí parametry a komunikaci s CP
- OCPP Backend (OCPP BackOffice) - účtovací systém a správa nabíjených vozidel a uživatelů
- OCPP komunikace - standardizovaný protokol pro vzájemnou komunikaci mezi CP nabíječkami a CS řídicím systémem.
- Silová elektrická přípojka (Grid Connection) - zdroje elektrické energie pro napájení CP nabíječek, které následně vhodný el. výkon definovaný řídicím CS systémem dodávají danému připojenému nabíjenému EV.
- Doplňkové systémy - přídavné zdroje silové el. energie, které mohou paralelně se síťovou el. přípojkou napájet CP (například solární panely, větrníky, bateriové / záložní zdroje BESS apod.). Využití jejich dostupné el. energie (el. výkonu) je pak též regulováno CS systémem podle aktuálních možností, případné předpovědi budoucího výkonu a cen el. energie ze sítě (Grid Connection).
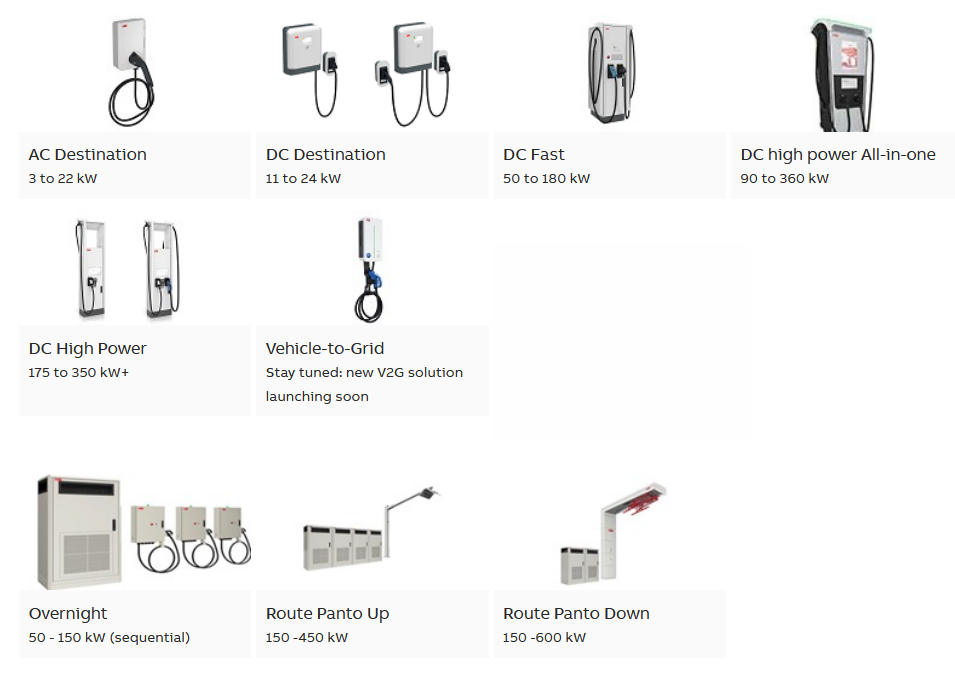
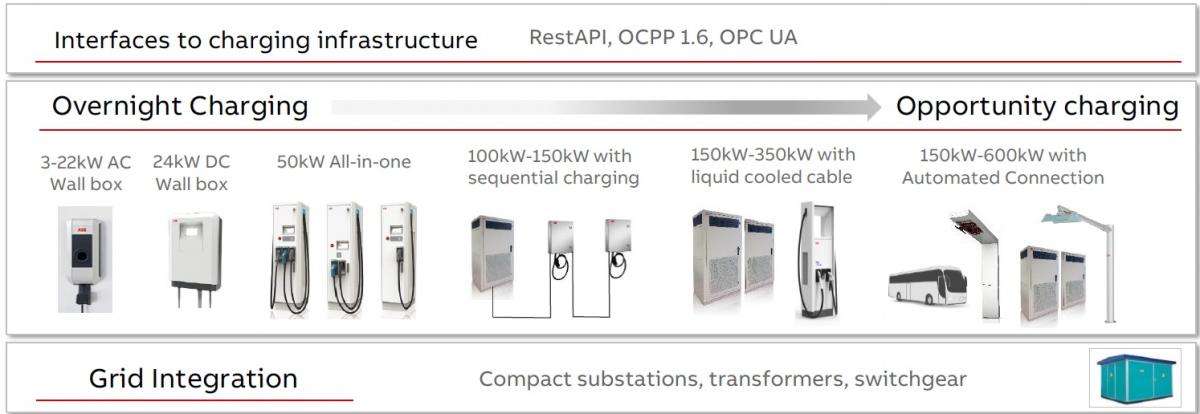
Příklady nabíjecích stanic CP (Charger Points) od společnosti ABB.
OCPP komunikace
OCPP je standardizovaný komunikační protokol speciálně vytvořený pro potřeby systémů chytrého nabíjení. OCPP protokol je implementován až na aplikační úrovni OSI komunikačního modelu. Jako základní komunikační prostředek na nižších vrstvách je klasický LAN TCP/IP ethernetová síť a buď SOAP nebo dnes častěji WebSocket komunikační protokol. WebSocket je počítačový komunikační protokol, poskytující plně duplexní (obousměrný) komunikační kanál přes jediné TCP připojení. WebSocket definuje svou vlastní strukturu zpráv nad TCP. Data odeslaná přes webovou zásuvku, na úrovni TCP jsou zabalena do rámce WebSocket se záhlavím. V případě OCPP komunikace se využívá TCP kanál 8835.
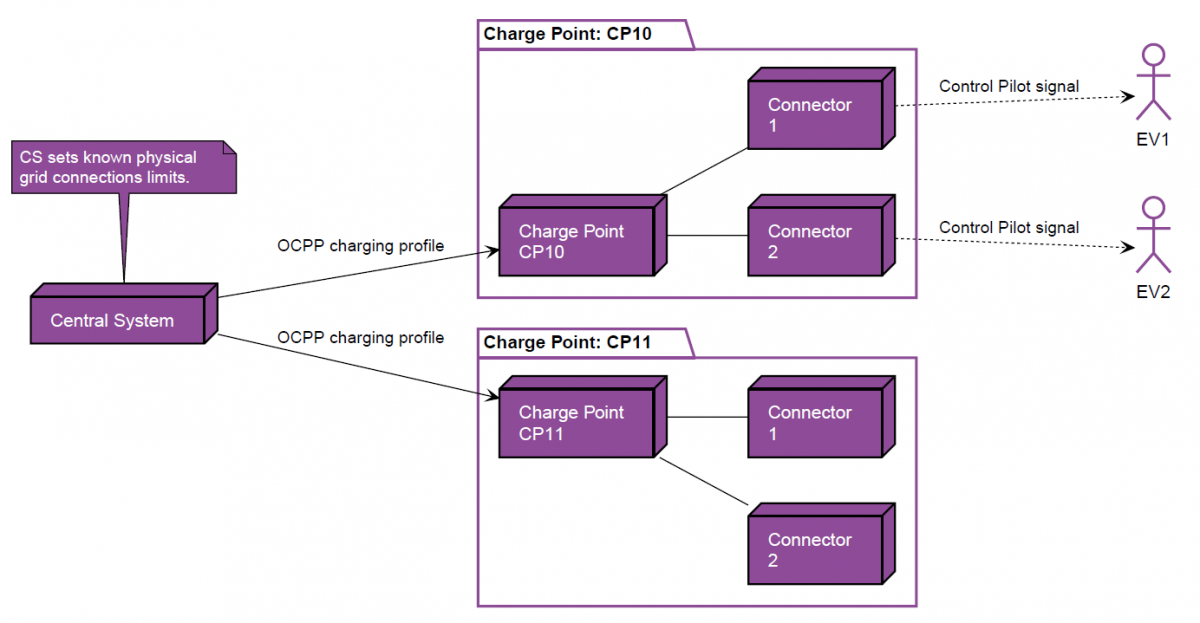
Rozšířená Smart Charging topologie, kde CP má více než jednu nabíjecí zásuvku.
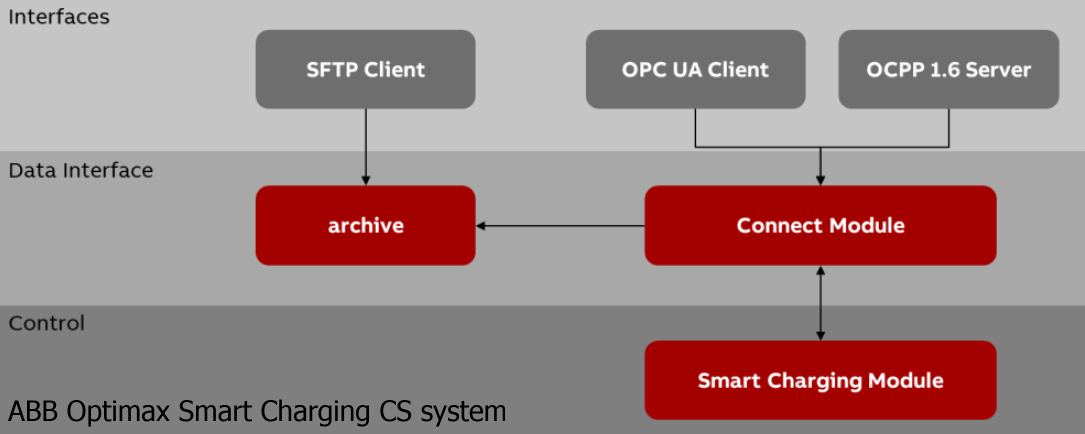
Základní bloková struktura Central Systému ABB Optimax Smart Charging.
OCPP protokol spíše než samotný přenos dat definuje, co a v jakém formátu se mezi CP a CS (OCPP brokerem) má přenášet, přesnou strukturu a posloupnost přenosu PDU zpráv ve formě příkazů nebo konfiguračních dat. Tedy jak má každá strana (tedy CP i CS) na určitý požadavek reagovat a jak se má konkrétně v každé určité situaci chovat.
V komunikační struktuře se CP nabíječky chovají jako klient jednotky a CS řídicí systém jako server jednotka. Po fyzickém připojení CP nabíječky na komunikační LAN ta jako první zahajuje komunikaci. Konkrétně základní posloupnost komunikačních PDU zpráv po tomto momentě je následující:
- CP odesílá přihlašovací zprávu "Authorize" se základními identifikačními parametry (identifikační jméno a číslo) a CS odpovídá potvrzením "Accepted", "Blocked" nebo "Invalid".
- CP pak odesílá zprávu "Boot Notification" pokaždé, když se CP spustí nebo restartuje. V ní odesílá další informace o sobě jako výrobce, typ, sériové číslo a druh měřiče energie. CS na to nejdříve reaguje opět potvrzením nebo zamítnutím "Accepted"/ "Rejected" a CP předává první základní informace, jako jak často se musí ohlásit pomocí zprávy "HeartBeat".
- CS odesílá zprávu "Get Configuration" do CP a na níž musí CP odeslat aktuální svoje nastavení / provozní parametry.
- CP se pak musí pravidelně ohlašovat alespoň odesíláním zprávy "Heartbeat" nebo "Status Notification", kde informuje CS o svém aktuálním provozním stavu ("Available", "Preparing", "Charging", "Error" a další).
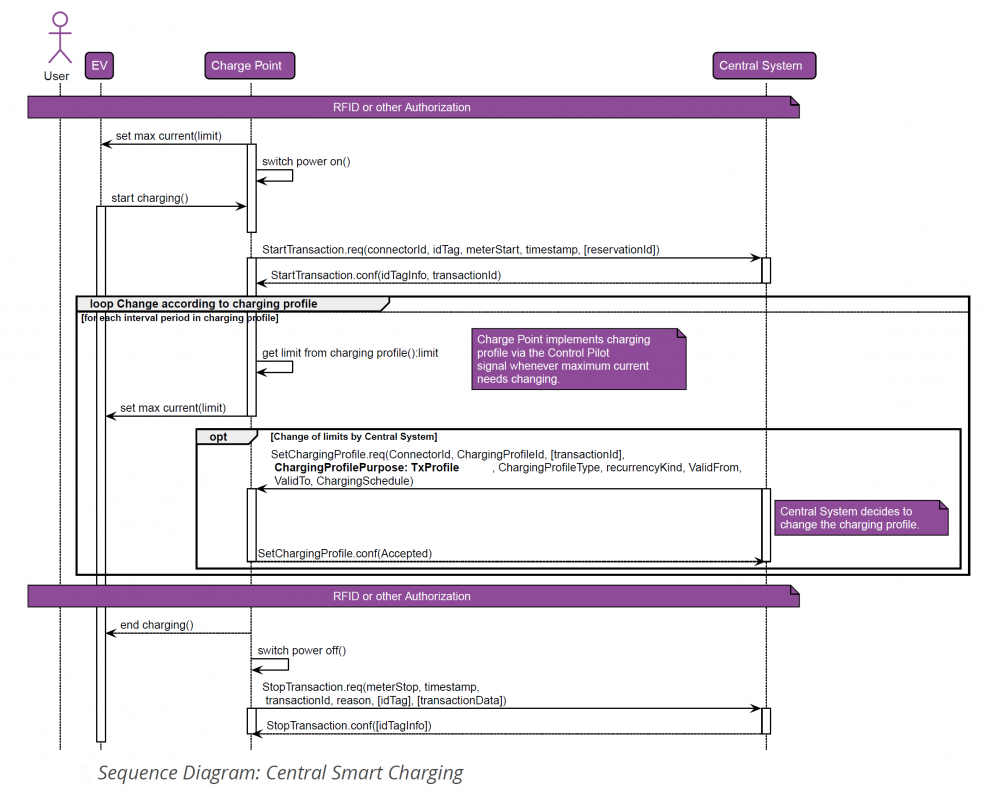
- Po připojení EV vozidla a přihlášení / identifikace uživatele na CP, pak CP pro zahájení nabíjení odesílá do CS zprávu "Start Transaction", v které mimo identifikačního údaje vozidla/uživatele vozidla také odesílá, na jakou zásuvku je konkrétně na CP připojen a počáteční stav svého elektroměru. CS odpovídá opět potvrzením přijetí či odmítnutí a v kladném případě odesláním tzv. transakčního ID.
- Následně CS odesílá zprávu "Set Charging Profile" s parametry tzv. nabíjecího profilu (TxDefaultProfile nebo TxProfile) a tu také odešle pokaždé, kdy potřebuje na CP změnit hodnotu například aktuálního nabíjecího výkonu, a CP zase pravidelně odesílá zprávu "Measure Values" od stavu svého elektroměru a SoC stavu nabití vozidla.
- Pro ukončení nabíjení, které iniciuje uživatel vozidla, když chce odpojit nabíjecí kabel z CP, musí CP odeslat do CS zprávu "Stop Transaction" s příslušným ID číslem transakce a také aktuálním stavem elektroměru pro danou zásuvku. CS opět odpovídá potvrzením "Accepted" nebo "Invalid". Až po potvrzení "Accepted" může CP nabíječka dovolit odpojit vozidlo ze zásuvky a transakce na straně CS vyúčtuje podle spotřebované energie pro danou transakci.
Tento popis OCPP komunikace je jen velmi zjednodušený. OCPP protokol definuje mnoho různých typů zpráv pro potřeby řešení různých situací. Také základní popis OCPP protokolu, například ve stále využívané verzi 1.6, má přes 130 stran. Aktuálně se již chystá vydání OCPP verze 2.1, jemuž předcházela verze 2.0. Problém těchto dvou nejnovějších verzí v porovnání s verzí 1.6 je ten, že nejsou zpětně kompatibilní a tedy nelze například CP podporující protokol OCPP 1.6 připojit na CS podporující jen 2.0 nebo obráceně. Zpětná kompatibilita OCPP 2.0 vzhledem k OCPP 1.6 byla obětována na úkor přidání nových funkcí, které nešlo realizovat zprávami definovanými v OCPP 1.6. Blíže strukturu OCPP protokolů a jejich problematiku představím v nějakém dalším samostatném článku na toto téma.
Regulace nabíjení vozidel
 Úplný základ řízení či regulace nabíjení vozidel je prakticky zcela definován přímo OCPP protokolem, který zahrnuje, jak má přesně komunikace mezi CP a CS systémem probíhat, jaká data má CP odesílat do systému a naopak, jak má reagovat a jaká data odesílat CS systém do jednotlivých CP. Z pohledu řízení nabíjení na CP připojeného vozidla (EV) musí EV po připojení do zásuvky CP odeslat CP systému data z automobilu, mezi které jednak patří identifikační číslo vozidla a také jeho úroveň aktuálního nabití (tzv. SoC parametr - Status of Charge) či maximální možný nabíjecí výkon. Tato data následně CP odešle do CS, které na základně pro danou CP nabíječku přednastavených parametrů maximálního a minimálního nabíjecího výkonu (Pmax a Pmin) definuje optimální hodnotu aktuálního nabíjecího výkonu. Tu odešle příslušné konkrétní CP nabíječce, která musí podle tohoto údaje upravit skutečný dodávaný nabíjecí výkon do EV. CS systém pak tuto hodnotu průběžně v čase reguluje / mění ve vymezených mezích Pmin a Pmax. A to nejen podle SoC vozidla, ale také podle aktuálně dostupného výkonu ze síťové silové el. přípojky, popř. doplňkových obnovitelných zdrojů či BESS. K tomuto účelu slouží parametru maximální dostupný odebíraný výkon se sítě (Grid Connection Pmax), který nesmí být nikdy překročen, jinak hrozí platba různých penále dodavatelům silové energie. Tato hodnota je tedy obvykle fixní a je tedy nutné vhodně rozdělit tento dostupný výkon plus s aktuálním dostupným výkonem z doplňkových silových el. zdrojů mezi všechny CP.
Úplný základ řízení či regulace nabíjení vozidel je prakticky zcela definován přímo OCPP protokolem, který zahrnuje, jak má přesně komunikace mezi CP a CS systémem probíhat, jaká data má CP odesílat do systému a naopak, jak má reagovat a jaká data odesílat CS systém do jednotlivých CP. Z pohledu řízení nabíjení na CP připojeného vozidla (EV) musí EV po připojení do zásuvky CP odeslat CP systému data z automobilu, mezi které jednak patří identifikační číslo vozidla a také jeho úroveň aktuálního nabití (tzv. SoC parametr - Status of Charge) či maximální možný nabíjecí výkon. Tato data následně CP odešle do CS, které na základně pro danou CP nabíječku přednastavených parametrů maximálního a minimálního nabíjecího výkonu (Pmax a Pmin) definuje optimální hodnotu aktuálního nabíjecího výkonu. Tu odešle příslušné konkrétní CP nabíječce, která musí podle tohoto údaje upravit skutečný dodávaný nabíjecí výkon do EV. CS systém pak tuto hodnotu průběžně v čase reguluje / mění ve vymezených mezích Pmin a Pmax. A to nejen podle SoC vozidla, ale také podle aktuálně dostupného výkonu ze síťové silové el. přípojky, popř. doplňkových obnovitelných zdrojů či BESS. K tomuto účelu slouží parametru maximální dostupný odebíraný výkon se sítě (Grid Connection Pmax), který nesmí být nikdy překročen, jinak hrozí platba různých penále dodavatelům silové energie. Tato hodnota je tedy obvykle fixní a je tedy nutné vhodně rozdělit tento dostupný výkon plus s aktuálním dostupným výkonem z doplňkových silových el. zdrojů mezi všechny CP.
 Tato regulace výkonu však není tak úplně triviální, jak to může na první pohled vypadat, protože je nutné počítat nejen s nabíjecím výkonem pro aktuálně připojená / nabíjená EV vozidla, ale musí zahrnovat i požadavek alespoň minimálního definovaného nabíjecího výkonu Pmin definovaného pro každé CP v CS. Tedy je nutné počítat s jakousi minimální rezervou nabíjecího výkonu i pro CP, které aktuálně žádné EV nenabíjejí, ale musí být na to připraveny, že kdykoliv po napojení EV do zásuvky CP mu musí být schopny dodávat alespoň Pmin nabíjecí výkon.
Tato regulace výkonu však není tak úplně triviální, jak to může na první pohled vypadat, protože je nutné počítat nejen s nabíjecím výkonem pro aktuálně připojená / nabíjená EV vozidla, ale musí zahrnovat i požadavek alespoň minimálního definovaného nabíjecího výkonu Pmin definovaného pro každé CP v CS. Tedy je nutné počítat s jakousi minimální rezervou nabíjecího výkonu i pro CP, které aktuálně žádné EV nenabíjejí, ale musí být na to připraveny, že kdykoliv po napojení EV do zásuvky CP mu musí být schopny dodávat alespoň Pmin nabíjecí výkon.
Navíc pro případ výpadku OCPP datové komunikace mezi CP a CS pak CS odesílá i základní předdefinovaný nabíjecí výkon v tzv. TxDefault nabíjecím profilu, kterým může CP připojené EV vozidlo trvale nabíjet i v tomto stavu přerušené komunikace s CP (tedy bez regulace nabíjecího výkonu v reálném čase). Tento základní nabíjecí výkon Pdefualt pak obvykle bývá definován na straně CS systému někde mezi hodnotami Pmax a Pmin. Všechny CP mohou mít stejně definovaný Pdefault nebo i každá svojí odlišnou hodnotu, nicméně vždy musí platit, že součet všech Pdefault hodnot výkonů musí být menší než maximální použitelný výkon silové síťové el. přípojky Pmax Grid Connection, aby opět nemohl být ani při maximální plném vytížení všech CP nabíjením EV tento limit překročen.
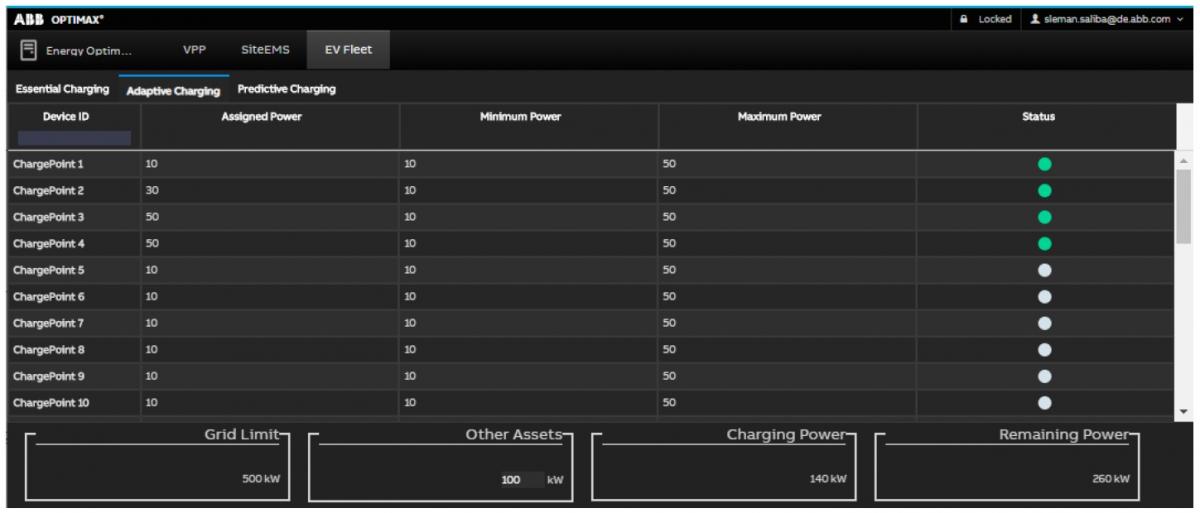
Příklad základního ovládacího panelu CS systému ABB Optimax Smart Charging Essential a Adaptive.
Různé chytré prediktivní systémy pak mohou ještě i optimalizovat nabíjecí výkonové hodnoty Pmin, Pmax či Pdefault "plánováním budoucnosti" s využitím různých on-line dat o předpovědi počasí (intenzity osvětlení solárních panelů či síle větru) nebo aktuální výhledové ceny el. energie na burze apod. Navíc systém umělé inteligence AI může z historických dat odvodit plán obvyklého vytížení CP pro různé časové úseky hodin dne nebo různé dny v týdnu a tomu i přizpůsobit plánování budoucí spotřeby el. energie.
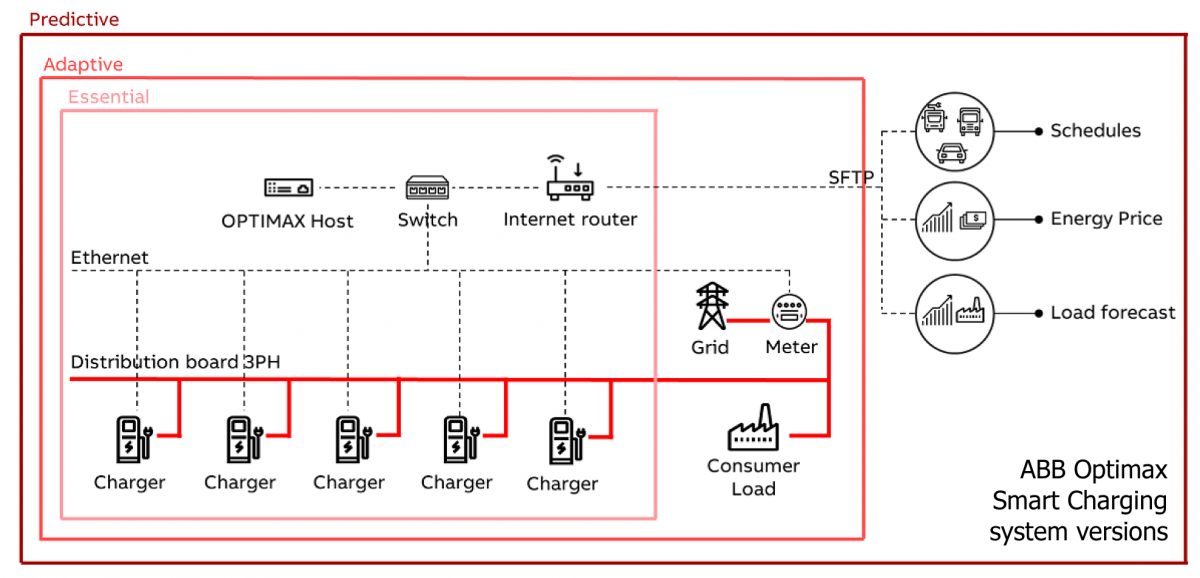
Příklad 3 dostupných provedení systému ABB Optimax Smart Charging (Essential, Adaptive a Predictive), které se liší podle požadavků na náročnost řízení nabíjení.
Regulace nabíjení autobusů (vozidel hromadné dopravy)
 Ještě složitější je pak CS řídicí systém používaný pro nabíjení EV vozidel hromadné či rozvážkové dopravy, jako jsou například dopravní vozidla pro lidi (elektrobusy) nebo rozvážkové dodávky pro každodenní rozvoz zásilek koncovým zákazníkům (elektrododávky). Obě tyto kategorie totiž mají obvykle naplánovaný přesný časový harmonogram a trasu dopravy. S tím je tedy nutné i sladit plánování dobíjení, aby každé vozidlo stihlo během každé zastávky mezi výjezdy dostatečně nabít na absolvování následující požadované trasy. Tento rozšiřující systém se označuje jako VAS systém (Value Added Services), který je definován dle standardu VDV 261 (“Verband Deutscher Verkehrsunternehmen”).
Ještě složitější je pak CS řídicí systém používaný pro nabíjení EV vozidel hromadné či rozvážkové dopravy, jako jsou například dopravní vozidla pro lidi (elektrobusy) nebo rozvážkové dodávky pro každodenní rozvoz zásilek koncovým zákazníkům (elektrododávky). Obě tyto kategorie totiž mají obvykle naplánovaný přesný časový harmonogram a trasu dopravy. S tím je tedy nutné i sladit plánování dobíjení, aby každé vozidlo stihlo během každé zastávky mezi výjezdy dostatečně nabít na absolvování následující požadované trasy. Tento rozšiřující systém se označuje jako VAS systém (Value Added Services), který je definován dle standardu VDV 261 (“Verband Deutscher Verkehrsunternehmen”).
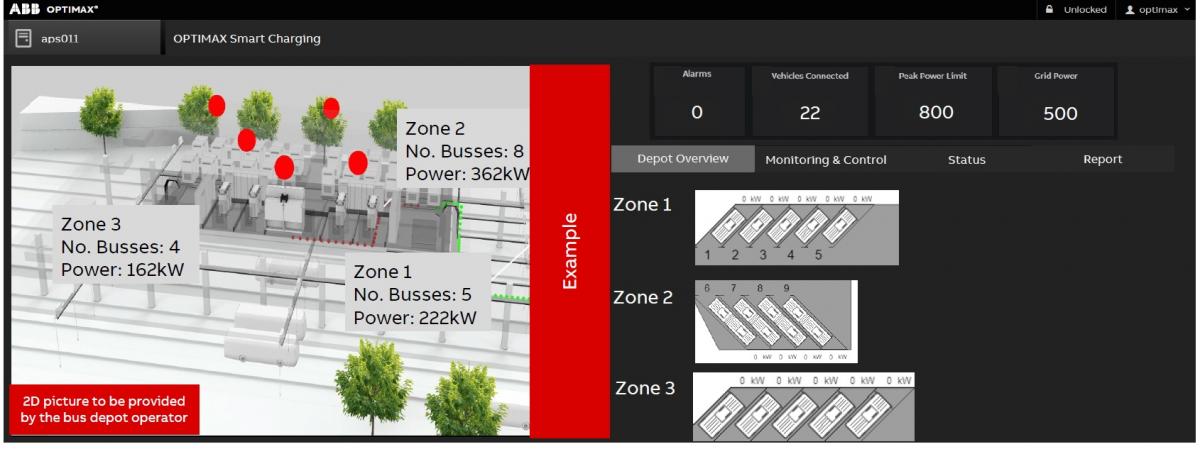
Ukázka vizualizace ABB Optimax Smart Charging Predictive systému.
Proto na straně CS systému přichází ke slovu i plán příjezdu přesně identifikovaných vozidel a jejich možná nejdelší doba nabíjení pro definování nutného nabíjecího výkonu pro každý konkrétní případ. Zatímco u základní regulace nabíjení běžných EV vozidel se často aplikuje systém FIFO, tedy první připojená dostává největší nabíjecí výkon a další připojená EV pak postupně zbytek dostupného nabíjecího výkonu, v případě nabíjení dopravních prostředků je někdy nutné upřednostnit vozidlo, které sice přijede na nabíjení v pořadí až za několika vozidly předním, ale musí být co nejrychleji obslouženo, protože má nejkratší dobu na nabíjení či naopak nejdelší následující trasu. Zde se tak dostávají do kalkulace nejen výše uvedené základní parametry, ale i harmonogramy a tedy celý systém řízení může být ve výsledku již velmi velmi komplikovaný a může zahrnovat mnoho různých nabíjecích variant / profilů a situací. O tom pak podrobněji v některém dalším článku.
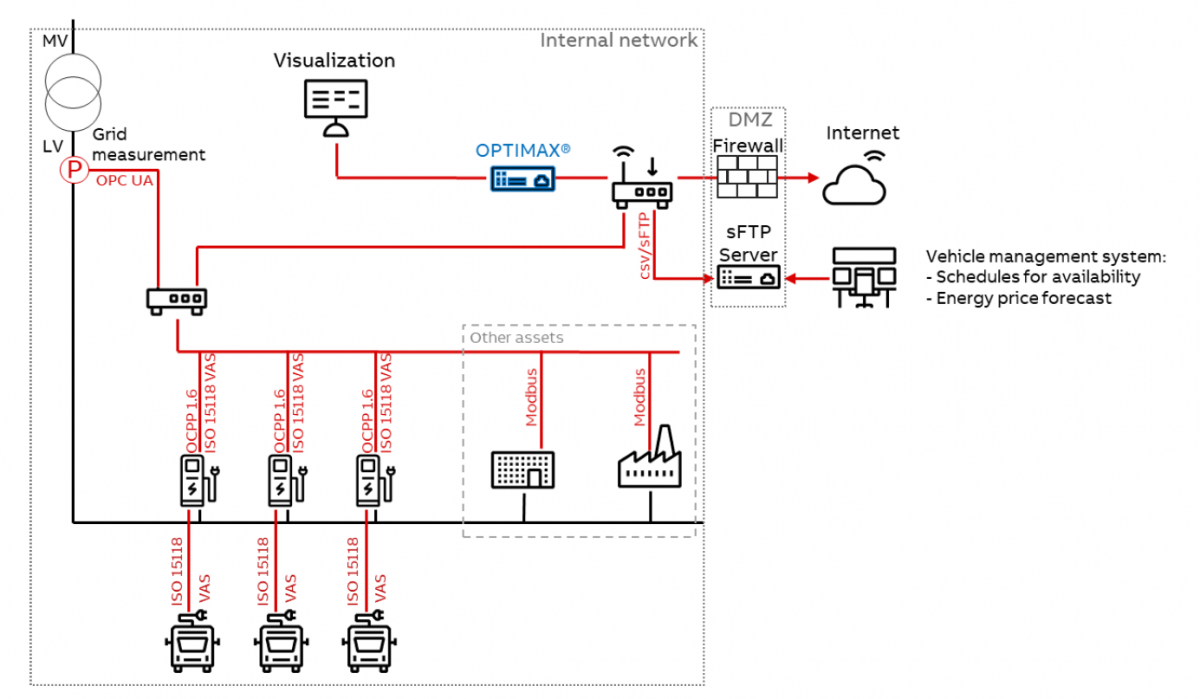
Ukázka struktury systému ABB Optimax Smart Charging Predictive umožňující plánování nabíjení podle předpovědi cen energií a předpovědi počasí (vliv na energii z obnoviteloných zdrojů) a také obsahující VAS systém pro plánované nabíjení autobusů.
Závěr
I když může systém nabíjení elektrovozidel někomu připadat triviální (prostě EV přijede, připojí se do zásuvky a začne se nabíjet dostupným výkonem nabíječky), ale v případě rozsáhlé sítě CP nabíječek třeba někde na hromadném parkovišti nebo přepravním depu, již není úplně triviální. Zde se již pro definování nabíjecího výkonu vozidla musí vzít v potaz mnoho různých dalších přidružených situací, aby celý proces funkce systému byl nejen dostatečně rychlý a spolehlivý, ale také energeticky a finančně co nejvíce efektivní. A o to jde jak firmě, která se nabíjením vozidel živí, tak i uživatelům nabíjených vozidel, kteří chtějí samozřejmě mít za co nejméně financí co největší komfort.
Odkazy:
- Webové stránky ABB o systému OPTIMAX Smart Charging: https://new.abb.com/power-generation/energy-management/optimax-solution-suite/optimax-cloud-for-smart-charging
- Webové stránky ABB o nabíjení elektrovozidel: https://new.abb.com/ev-charging



