 Co jsou pohony ROBO CYLINDER ?
Co jsou pohony ROBO CYLINDER ?
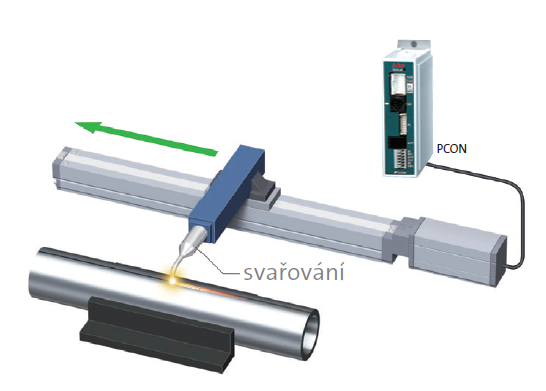
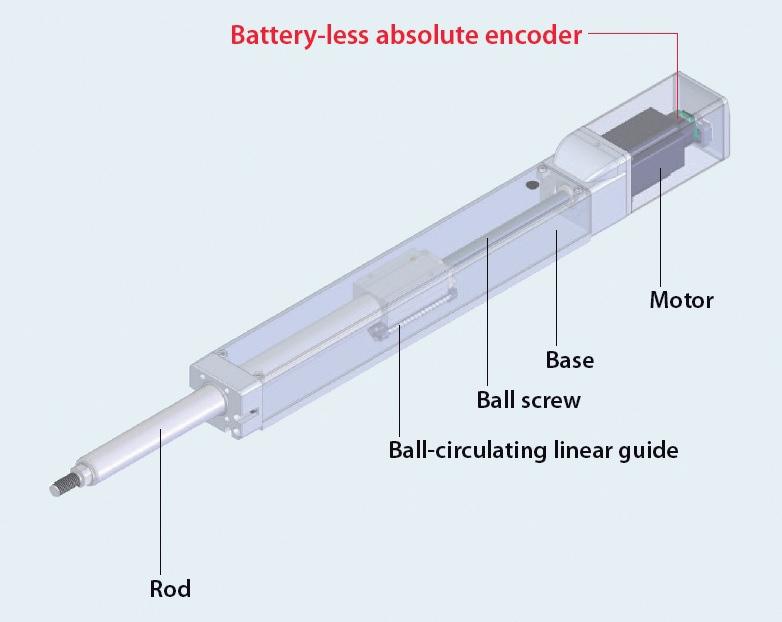
Robotické pohony ROBO CYLINDER jsou lineární elektrické pohony japonského výrobce elektrických pohonů a robotů IAI v provedení jezdec nebo válec. Jejich funkce je založena založené na použití kuličkového šroubu a krokového motoru či servomotoru a jsou určeny pro horizontální i vertikální polohování a nabízí široké spektrum použití – od zvedání, pokládání a přesunu výrobků, přes jejich tlačení a polohování, až po lisování. Představují tak i efektivní alternativu pneumatických válců. Při podobných rozměrech poskytují max. zatížení až 500 kg, max. zdvih až 1 200 mm s opakovatelností ±0,02 mm (u nejnovějších typů až ±0,01 mm) a max. tlačnou sílu až 19 600 N.
 Jejich hlavní a výraznou praktickou výhodou proti pneumatických válcům je vyšší přesnost (opakovatelnosti) dosažení pozice, možnost polohování do více poloh, možnost regulaci tlačné síly a široké možnosti řízení a kontroly ramp náběhu a doběhů na každou pozici. Také umožňují bezproblémovou možnost stavby víceosých systémů, kde jednotlivé osy realizované samostatným pohonem je možné vhodně a podle potřeby pohybově elektronicky synchronizovat. Ten, kdo se někdy např. pokoušel přesně synchronizovat přesné současné vysunutí několika pneumatických pístů, mi dá jistě za pravdu. Nehledě na vliv kolísání tlaku přívodního vzduchu, jehož rozvod budoucí uživatel stroje nemusí mít kvalitní, což konstruktér stroje může často ovlivnit jen velmi omezenými prostředky. Další výhodou na straně elektrických válcových pohonů je možnost přesného zpětnovazebního odměřování inkrementálním nebo absolutním enkodérem.
Jejich hlavní a výraznou praktickou výhodou proti pneumatických válcům je vyšší přesnost (opakovatelnosti) dosažení pozice, možnost polohování do více poloh, možnost regulaci tlačné síly a široké možnosti řízení a kontroly ramp náběhu a doběhů na každou pozici. Také umožňují bezproblémovou možnost stavby víceosých systémů, kde jednotlivé osy realizované samostatným pohonem je možné vhodně a podle potřeby pohybově elektronicky synchronizovat. Ten, kdo se někdy např. pokoušel přesně synchronizovat přesné současné vysunutí několika pneumatických pístů, mi dá jistě za pravdu. Nehledě na vliv kolísání tlaku přívodního vzduchu, jehož rozvod budoucí uživatel stroje nemusí mít kvalitní, což konstruktér stroje může často ovlivnit jen velmi omezenými prostředky. Další výhodou na straně elektrických válcových pohonů je možnost přesného zpětnovazebního odměřování inkrementálním nebo absolutním enkodérem.
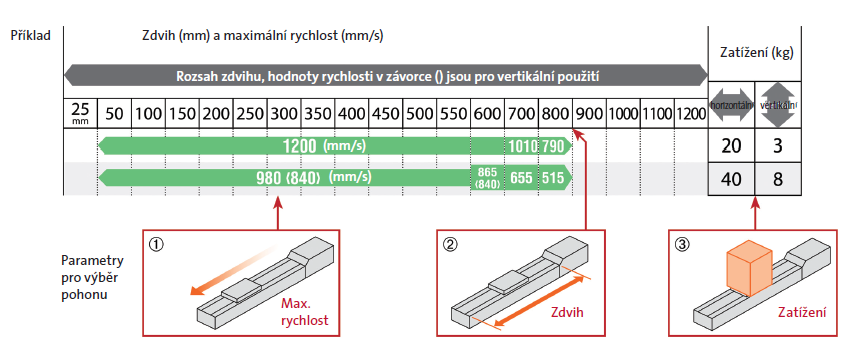
Základní postup výběru správného lineárního pohonu dle provozních požadavků.
Praktické porovnání elektrických a pneumatických válců
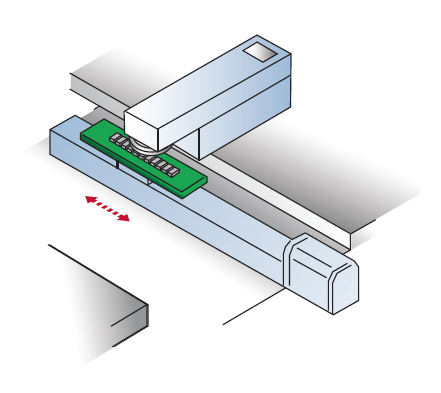
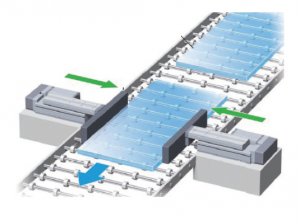
Výrobce IAI uvádí následující modelový příklad výrobního systému za použití pneumatických válců:
 Jde o jednoduchý, poloautomatický systém, který skládá na lince senzory a na senzorech provádí test elektrické kontinuity.
Jde o jednoduchý, poloautomatický systém, který skládá na lince senzory a na senzorech provádí test elektrické kontinuity.- Obsluha vloží součástku a stiskne tlačítko, aby se stůl pohnul dozadu a začalo kompletování (připevnění konektorů stlačením). Poté zkontroluje smontovanou část a stůl vrátí do původní pozice.
- Systém obsahuje celkem 8 vzduchových válců.
- Požadavek podpory výroby 10 různých typů produktu.
- Čas na instalaci a nastavení 10 hodin.
- Doba pracovního cyklu 10,5 s.
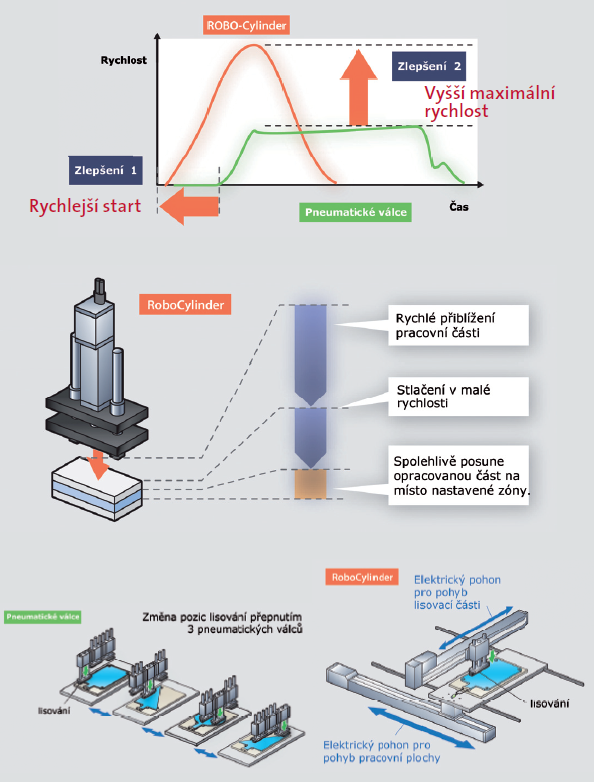
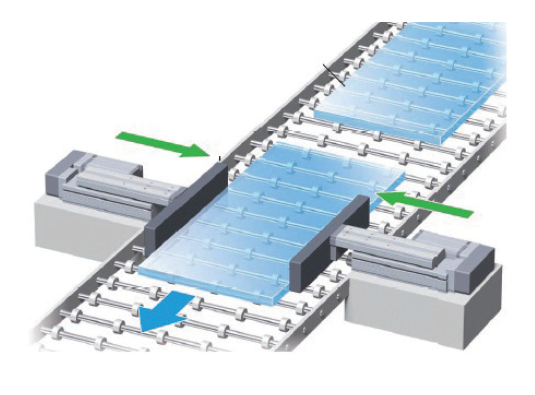
Při nahrazení pneumatických válců elektrickými pohony IAI ROBO CYLINDER pak výrobce IAI uvádí následující výhody:
- U vzduchových válců nelze zvýšit rychlost jejich provozu kvůli otřesu při zastavení.
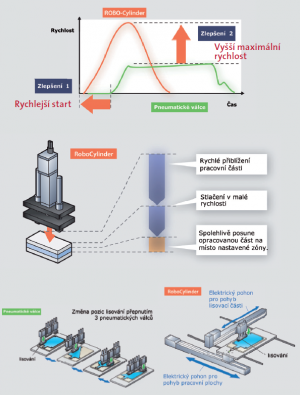 Elektrické pohony negenerují žádný otřes při zastavení a lze tak u nich zvýšit maximální rychlost provozu.
Elektrické pohony negenerují žádný otřes při zastavení a lze tak u nich zvýšit maximální rychlost provozu.- Redukce doby cyklu nastavení pracovní plochy:
- Jedna řada vzduchových válců podporuje výrobu 10 typů produktu.
- Pro změnu výrobku se již nemusá střídat 3 typy vzduchových válců.
- Doba nastavení prac. stolů se zkrátila o 1,8 s.
- Čas potřebný k nastavení se zredukoval na 0 s.
- Redukce doby cyklu pro lisování konektoru:
- Elektrické pohony začínají s pohybem rychleji než vzduchové válce, proto lze výrazně snížit dobu cyklu.
- U systému s pneumatickými válci byl pro započetí lisování použit spínač pro kontrolu pozice zalisování, což prodlužovalo dobu operace.
- Systém s elektrickými pohony "ROBO Cylinder" využívá pro fázi stlačování konektoru nastavení pohybové rampy a hlášení o průchodu definovanou zónou.
- Čas cyklu stlačování se tak zkrátil o 2 sekundy.
- Časová úspory: celkový čas cyklu se zkrátil o 3,8 s.
Základní rozdělení a přehled pohonů IAI ROBO CYLINDER (řady RCA, RCP, ERP):
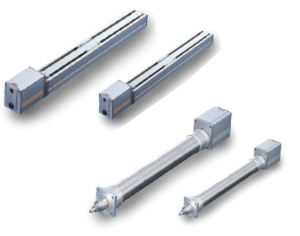
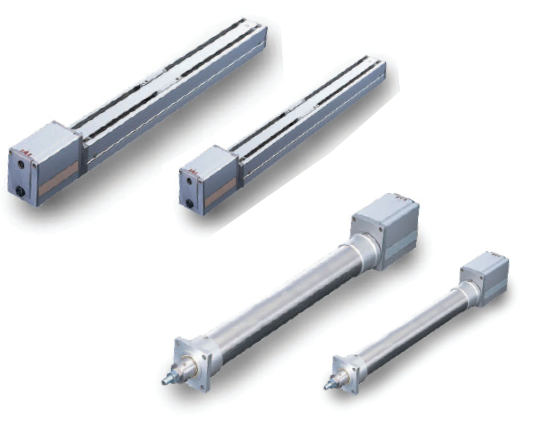
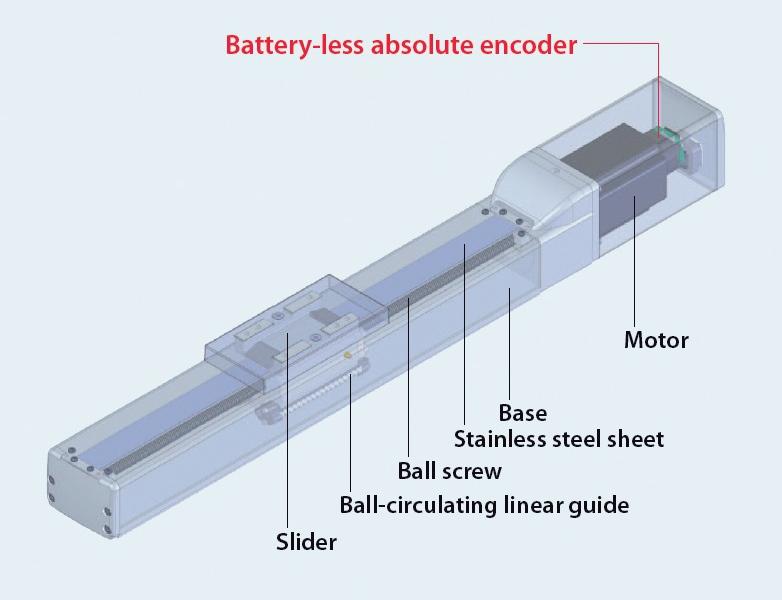
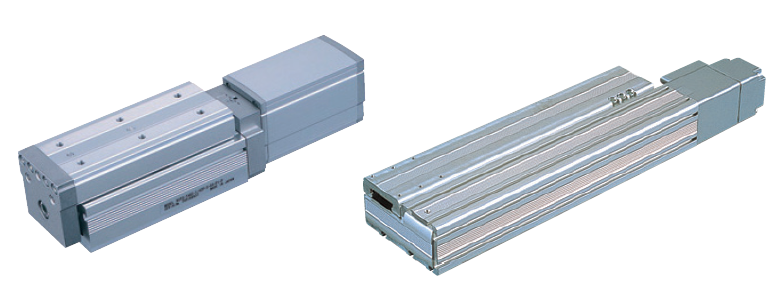
Pohony ROBO Cylinder typu jezdec:
 Max. zdvih až 1200 mm.
Max. zdvih až 1200 mm.- Max. rychlost až 1 500 mm/s.
- Opakovatelnost až ±0,01 mm.
- Max. zatížení 80 kg.
- Pohyb jezdce dopředu a dozadu.
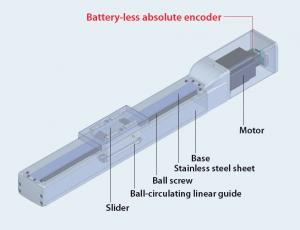
- Zabudované lineární vedení.
- Připojení přes spojku.
- Přímé i reverzní připojení motoru.
 Pohon krokovým motorem nebo servomotorem (dle konkrétního typu).
Pohon krokovým motorem nebo servomotorem (dle konkrétního typu).- Provedení s externí i s vestavěnou interní řídící jednotkou.
- Inkrementální nebo absolutní enkodér (dle konkrétního typu) zabudován přímo v pohonu.
- K dispozici i provedení IP67 do čistého, prašného a vlhkého prostředí.
- Použití:
- horizontální nebo vertikální polohování,
- zvedání předmětů,
- převoz / umísťování předmětů.
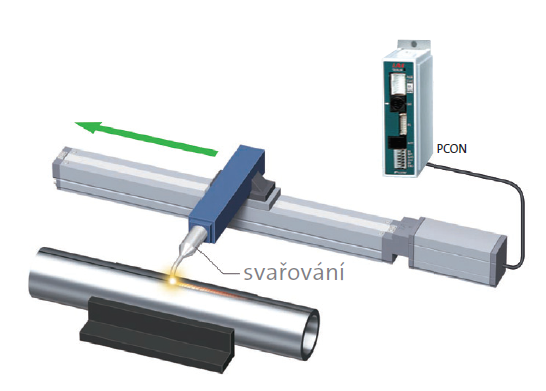
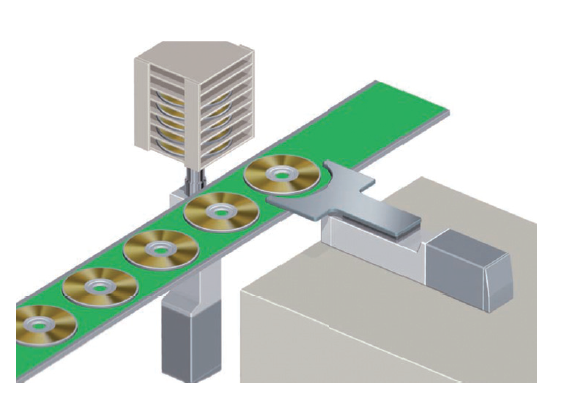
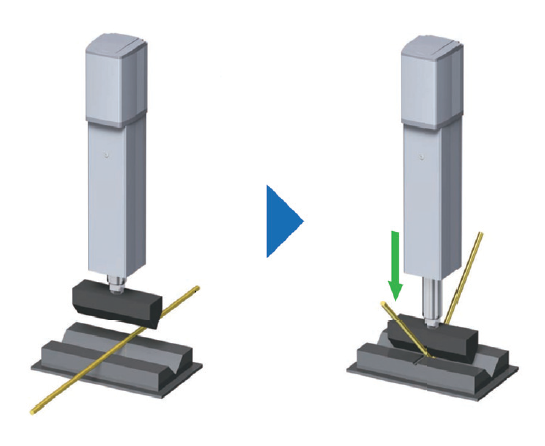
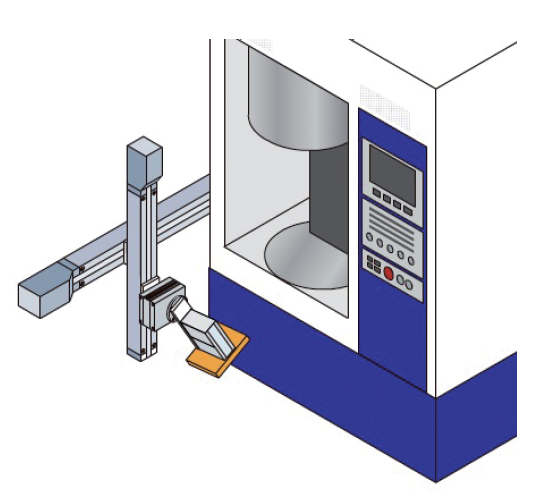
Příklady použití pohonů ROBO CYLINDER s jezdcem.
Pohony ROBO Cylinder typu válec:
 Max. zdvih až 700 mm.
Max. zdvih až 700 mm.- Max. rychlost až 1 120 mm/s.
- Opakovatelnost až ±0,01 mm.
- Max. zatížení až 500 kg.
- Válec vyjíždí a zajíždí do těla pohonu.
- Možnost použití přídavného vedení.
- Připojení přes spojku.
- Přímé i reverzní připojení motoru.
- Pohon krokovým motorem
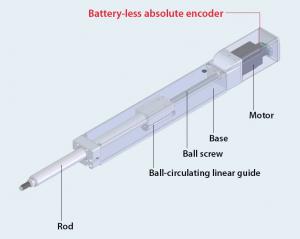 nebo servomotorem (dle konkrétního typu).
nebo servomotorem (dle konkrétního typu). - Některá provedení mají integrovaný inkrementální nebo absolutní enkodér.
- Provedení s externí i s vestavěnou interní řídící jednotkou.
- U některých typů zesílené vnitřním vedením pro větší kyvné momenty.
- K dispozici i provedení IP67 do čistého, prašného a vlhkého prostředí.
- Použití pohonů typu válec:
- zvedání a pokládání výrobků,
- horizontální nebo vertikální polohování,
- tlačení předmětů,
- lisování.

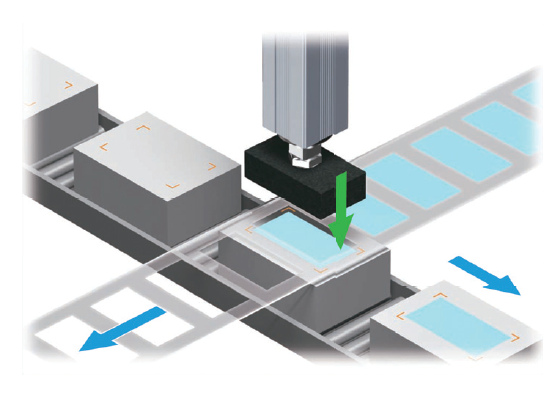
Příklady použití válcových pohonů ROBO CYLINDER.
 Kompaktní pohony ROBO CYLINDER:
Kompaktní pohony ROBO CYLINDER:
- Max. zdvih až 300 mm.
- Max. rychlost až 800 mm/s.
- Opakovatelnost až ±0,02 mm.
- Max. zatížení až 10 kg.
- Dvě provedení / typy: rameno a výsuvný stůl.
 Stejný princip jako typ válec, ale obsahuje vestavěné vedení.
Stejný princip jako typ válec, ale obsahuje vestavěné vedení.- Použití:
- zvedání a snižování zátěže,
- rovnání a centrování produktů,
- vytlačování produktů,
- pro výrobky a zátěže s mnoha přesahy
Rotační pohony a grippery ROBO CYLINDER:
 Rotační pohony a grippery (uchopovače) jsou již speciálními provedení, které doplňují celou nabídku pohonů ROBO CYLINDER. Grippery slouží primárně pro uchopení a vycentrování zátěže, a proto poskytují snadné nastavení síly uchopení a vyznačují se velkou přesností se zdvihem až 200 mm. Rotační pohony slouží k natáčení v obou směrech v úhlu otočení až 360 ° nebo případně i vícenásobné otočení například u přesných otočných stolů či růžic.
Rotační pohony a grippery (uchopovače) jsou již speciálními provedení, které doplňují celou nabídku pohonů ROBO CYLINDER. Grippery slouží primárně pro uchopení a vycentrování zátěže, a proto poskytují snadné nastavení síly uchopení a vyznačují se velkou přesností se zdvihem až 200 mm. Rotační pohony slouží k natáčení v obou směrech v úhlu otočení až 360 ° nebo případně i vícenásobné otočení například u přesných otočných stolů či růžic.
Příklady použití rotačního pohonu ROBO CYLINDER.
Řídící jednotky pohonů ROBO CYLINDER
Řídící jednotky zprostředkovávají rozhraní mezi pohonem a PLC nebo jiným nadřazeným systémem. Podle konkrétního typu pohonu je řídící jednotka buď externí v podobě modulu na DIN lištu do rozvaděče, nebo u pohonů typu ERC, které mají řídící jednotku integrovanou přímo v motoru.
 Externí jednotky ACON/ PCON / SCON umožňují předprogramovat až 512 pozicemi včetně u každé pozice s kompletním nastavením pohybové rampy. Řízení pohonu/jednotky lze provádět pomocí binárních vstupů a výstupů, pulzního řízení nebo moderního digitálního řízení z PLC po průmyslové sběrnici PROFIBUS, PROFINET, DeviceNet, CC-Link, EtherNet nebo EtherCat. Pro bezproblémový chod jednotky kontrolují úroveň vibrací a jednotky SCON navíc umožňují kontrola tlačné síly díky použitému tenzometru, což je vhodné například při lisování, kde síla lisování může být přesně kontrolována a tak lze snadno odhalit defekty díky nastavení limitů. Externí jednotky ASEL/PSEL/SSEL/XSEL navíc také zvládají ovládání až 6 pohonů najednou a umožňují naprogramovat jednoduché programy. Pro programování slouží jednotný programovací software bez nutnosti velké znalosti programování. S jeho pomocí lze naučit konkrétní pozice, které řídicí systém (PLC) zadává prostřednictvím běžných digitálních signálů či komunikační sběrnice a pohon pak do těchto pozic přejíždí. Sofistikovanější variantou řízení je nechat řídicí systém (PLC) požadovanou pozici spočítat a tu pak do pohonu poslat po některé z podporovaných průmyslových sítí.
Externí jednotky ACON/ PCON / SCON umožňují předprogramovat až 512 pozicemi včetně u každé pozice s kompletním nastavením pohybové rampy. Řízení pohonu/jednotky lze provádět pomocí binárních vstupů a výstupů, pulzního řízení nebo moderního digitálního řízení z PLC po průmyslové sběrnici PROFIBUS, PROFINET, DeviceNet, CC-Link, EtherNet nebo EtherCat. Pro bezproblémový chod jednotky kontrolují úroveň vibrací a jednotky SCON navíc umožňují kontrola tlačné síly díky použitému tenzometru, což je vhodné například při lisování, kde síla lisování může být přesně kontrolována a tak lze snadno odhalit defekty díky nastavení limitů. Externí jednotky ASEL/PSEL/SSEL/XSEL navíc také zvládají ovládání až 6 pohonů najednou a umožňují naprogramovat jednoduché programy. Pro programování slouží jednotný programovací software bez nutnosti velké znalosti programování. S jeho pomocí lze naučit konkrétní pozice, které řídicí systém (PLC) zadává prostřednictvím běžných digitálních signálů či komunikační sběrnice a pohon pak do těchto pozic přejíždí. Sofistikovanější variantou řízení je nechat řídicí systém (PLC) požadovanou pozici spočítat a tu pak do pohonu poslat po některé z podporovaných průmyslových sítí.
U pohonů ROBO CYLINDER řady ERC s integrovanou řídící jednotkou přímo v pohonu je k dispozici ovládání přes digitální vstupy a výstupy nebo sériovou komunikaci přes ASCII znaky nebo protokolem Modbus-RTU. Naprogramovat lze až 16 programovatelných poloh.
Závěr
Elektrické válce mohou často díky svého provedení v mnoha aplikacích přímo nahradit pneumatické válce. Nicméně vzhledem k jejich vyšší pořizovací ceně v porovnání k pneumatickým válcům je primárně předurčují pro aplikace vyžadující zejména přesné opakovatelné polohování, které je ve spojení s absolutním enkodérem velmi vysoké (desetiny mm). Také obvykle poskytují velkou rychlost pohybu i zrychlení při manipulaci s těžšími předměty. Navíc eliminují v mnoha firmách problematickou stabilitu tlaku tlakového vzduchu, který když kolísá, tak samozřejmě kolísá i rychlost vysunutí pneumatického pístu. To v mnoha případech může způsobovat i kolizní situace. Elektroválce mají stále opakovatelně stejné rychlosti a přesnosti.
Odkazy:
- Web webu výhradního distributora pohonu IAI v ČR: http://www.rem-technik.cz
- Web výrobce - společnosti IAI: https://www.intelligentactuator.com/
- Přímý odkaz na web se sortimentem pohonů ROBO CYLINDER: https://www.rem-technik.cz/robotika/elektricke-pohony/
- Článek "Miniaturní lineární mikropohony RCL ve tvaru pneumatického válce" na serveru automatizace.hw.cz
- Článek "Elektrické válce Festo EPCO pro robotické aplikace" na serveru automatizace.hw.cz



