
"Díky využití platformy LabVIEW jsme byli schopni ve velmi krátkém čase vytvořit prototyp, naprogramovat a otestovat novou robotickou linku."
- Ignazio Piacentini, ImagingLab
Zadání
Zjistit pozici a orientaci štětečků pro nanášení pudru a zároveň provést kontrolu jejich kvality. Naprogramovat robotický systém, který využívá zásobník s osmi pozicemi, na uchopování štětečků a jejich umisťování do pouzdra s pudrem.
Řešení
Použití dvou robotů typu DENSO SCARA HSS-45552 se strojovým viděním, které obsahuje desky pro sběr obrazových dat od NI. Integrace řízení robotů do programovacího prostředí LabVIEW pomocí knihovny ImagingLab Robotics Library for DENSO. Naprogramování celé robotické stanice v prostředí LabVIEW s využitím NI Vision Development Module.
Společnost ImagingLab, člen programu NI Silver Alliance Partner, je technologická společnost, která pomáhá systémovým integrátorům, konstruktérům strojů a uživatelům při využívání technologií pro strojové vidění a robotiku. Svým zákazníkům dokážeme poradit, jak minimalizovat investice a zjednodušit osvojení nových technologií. Naše znalosti z akademického prostředí, bohaté zkušenosti se systémovou integrací, znalost nástrojů pro zpracování obrazu a softwaru od NI a neustálá snaha držet krok s rychle se vyvíjejícím oborem strojového vidění – všechny tyto faktory se podílejí na více než 20 letech zkušeností na globálním trhu se systémy strojového vidění.
Díky dlouhodobé spolupráci se společností Vetraco, zkušeným leaderem trhu v oblasti výroby kompletačních a balicích linek pro kosmetiku, se stala naše společnost ImagingLab upřednostňovaným partnerem pro technologie související se strojovým viděním a robotikou.
U balicí linky pro pouzdra s kosmetickým pudrem společnosti Vetraco jsme museli přesně umístit štěteček na pudr do držáku (80 x 20 mm), pomocí kterého byl štěteček následně přesunut do pouzdra s pudrem. Pouzdra jsme umisťovali do zásobníku s osmi pozicemi při rychlosti balení 80 kusů za minutu. Systém musel být flexibilní a snadno ovladatelný pro operátory linky, protože různé šarže mohly obsahovat různé štětečky a různé tvary pouzder.
Vývoj snadno použitelného balicího systému
Abychom dosáhli rychlosti 80 kusů za minutu, nainstalovali jsme dvě shodné robotické stanice. Štětečky jsou nabírány do programovatelného podavače (Anyfeeder SX-240 od firmy FlexFactory), který třesením rozděluje pro snadnější zachytávání. Podavač Anyfeeder komunikuje s celou stanicí prostřednictvím knihovny v LabVIEW.
Systém strojového vidění obsahuje desku pro sběr obrazu od NI, CCD kameru s rozlišením 1400 x 1000 pixelů a infračervené osvětlovací těleso vyrobeném na míru společností ImagingLab. Systém snímá obraz štětečků, zjišťuje jejich pozice a předává souřadnice robotovi. Pokud nejsou k dispozici žádné objekty k odebrání, systém zatřese podavačem Anyfeeder tak, aby se další štětečky přesunuly do prostoru pod kamerou. Systém volí jeden ze čtyř režimů otřesů – vibrace směrem dopředu nebo dozadu, neutrální vibrace a přesun objektů pod kameru. Režimy jsou aktivovány na základě informací od vizuálního systému.
Zásobník na osm pouzder je umístěn před robotem na pevně dané pozici. Štětečky v podavači mohou mít různou orientaci, jejíž přesné určení je úkolem pro vizuální systém. Každý štěteček musí být do svého pouzdra umístěn správně orientovaný. Robot má manipulátory pro čtyři štětečky, takže vizuální systém musí v každém cyklu určit pozici právě čtyř štětečků. Po naplnění zásobníku je před robota přesunut prázdný zásobník. Robotická stanice pracuje 24 hodin denně, sedm dní v týdnu a vyřazuje jakékoliv defektní výrobky.
Vizuální systém navádí robota a umožňuje kontrolu kvality sledovaných objektů, neboť dokáže měřit rozměry a kontrolovat celistvost. Pomocí knihovny ImagingLab Robotics Library for DENSO jsme implementovali aplikaci mající těsnou vazbou mezi strojovým viděním a robotikou. Výsledkem je to, že uživatel může kalibrovat vizuální i robotickou část pomocí jediné operace.
Programování, prototypy a testování průmyslových robotických aplikací v LabVIEW
Díky využití platformy LabVIEW jsme byli schopni ve velmi krátkém čase vytvořit prototyp, naprogramovat a otestovat novou robotickou linku. Další velkou výhodou, kterou platforma LabVIEW přinesla, byla možnost navrhnout a podle potřeby upravit grafické uživatelské rozhraní.
Stejný program v LabVIEW může pracovat na zařízeních od osobních počítačů až po inteligentní kamery, takže jsme velice flexibilní při volbě NI hardwaru pro naše systémy. Můžeme také opakovaně používat části hardwaru a vybavení z minulých projektů. Kromě toho standardy NI umožňují rychlou integraci produktů, což zkracuje náklady a čas potřebný pro vývoj aplikací.
Další kroky
- Pročtěte si další informace o této aplikaci
- Stáhněte si Vision Resource Kit
- Zjistěte více o knihovně ImagingLab Robotics Library for DENSO

Na balicí lince Vetraco jsme museli umístit správně orientovaný štěteček do pouzdra s kosmetickým pudrem.

Podavač Anyfeeder komunikuje s celou stanicí prostřednictvím knihovny v LabVIEW.
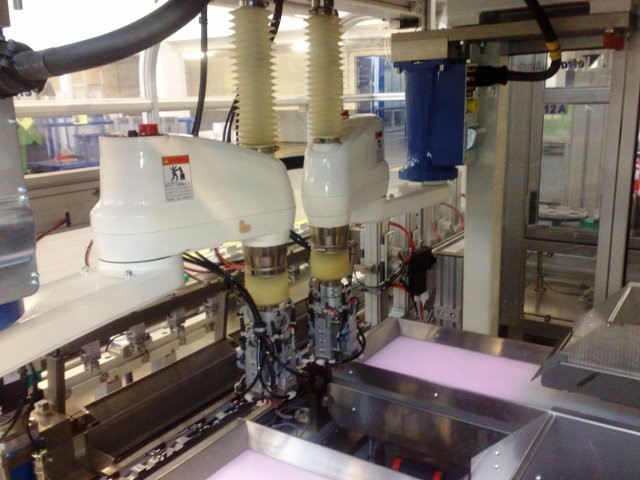
Pouzdra s pudrem, do kterých se vkládají štětečky, jsou umístěna v zásobníku s osmi pozicemi na pevně určeném místě před robotem.




Komentáře
Robotika musí být ať to stojí co to stojí.
Toto vše zvládne pracovník i mírně handicapovaný. Ale robotika musí být ať to stojí co to stojí.