
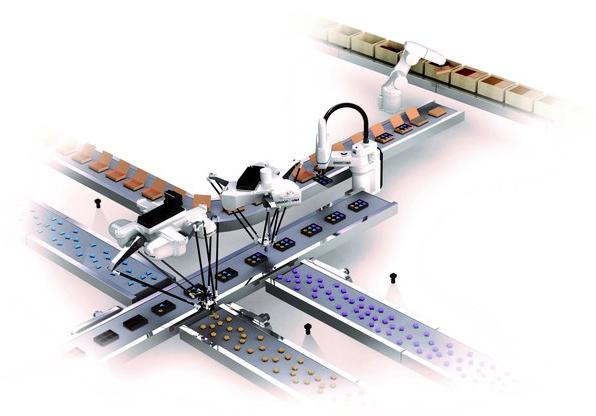
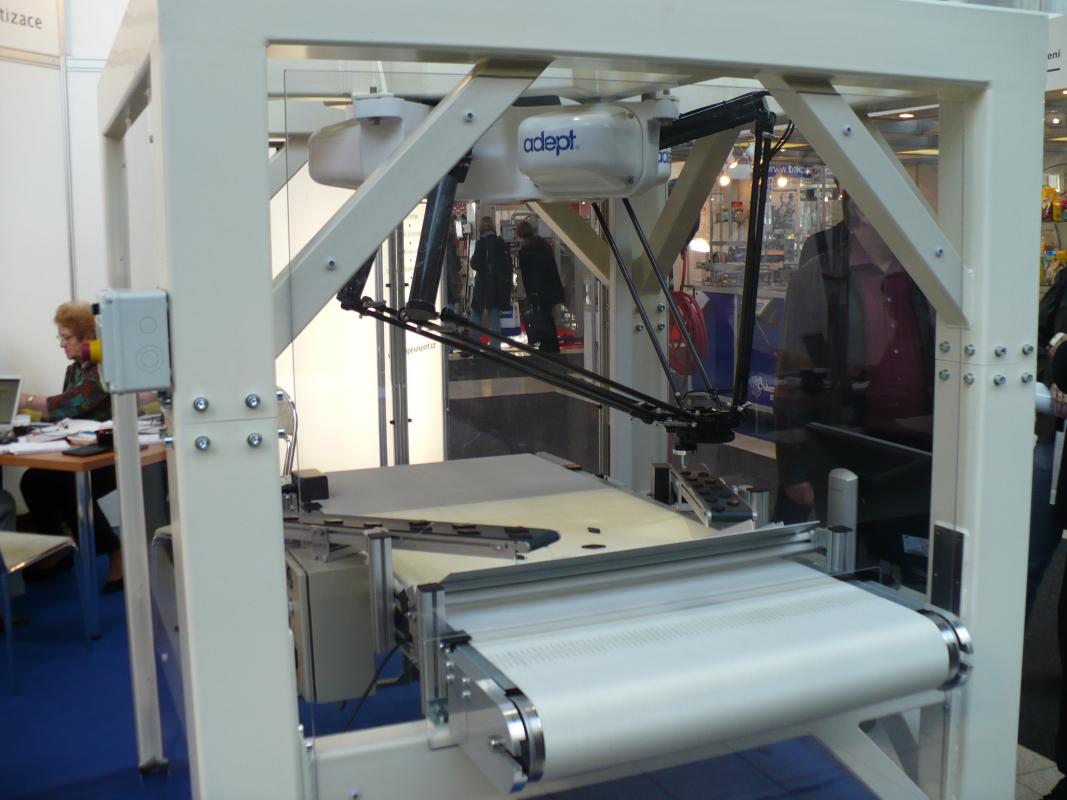
 Mezi nejrychlejší robotické technologie, co se rychlosti pohybu týče, patří 4-ramenné provedení označované jako paralelní nebo delta (Parallel Delta Robots). Konstrukci tohoto robota se čtyřmi stupni volnosti (Delta with 4 degrees of freedom) vyvinula a nechala si patentovat americká společnost Adept technology Inc. a je na první pohled snadno rozeznatelná konstrukcí se čtyřmi subtilními rameny vycházející ze společné kompaktní nosné / poháněcí části a opět společně spojené na sběrné / manipulační "ruce". Díky této subtilní, ale velmi pohyblivé konstrukci, je možné velmi rychle vyhledávat ty správné konkrétní produkty na běžícím dopravním páse ve shluku různý produktů a přenášet je na jiné pásy nebo přesně umisťovat do krabiček. Například vybírat různé bonbóny přepravované na dopravníku a umísťovat je přesně na pro ně určená místa například v bonboniéře. Zvláště v potravinářství či jiném lehkém průmyslu v podobných aplikacích ve výrobnách s velmi rychlou produkcí a objemem produktů je asi hlavní uplatnění tohoto robota.
Mezi nejrychlejší robotické technologie, co se rychlosti pohybu týče, patří 4-ramenné provedení označované jako paralelní nebo delta (Parallel Delta Robots). Konstrukci tohoto robota se čtyřmi stupni volnosti (Delta with 4 degrees of freedom) vyvinula a nechala si patentovat americká společnost Adept technology Inc. a je na první pohled snadno rozeznatelná konstrukcí se čtyřmi subtilními rameny vycházející ze společné kompaktní nosné / poháněcí části a opět společně spojené na sběrné / manipulační "ruce". Díky této subtilní, ale velmi pohyblivé konstrukci, je možné velmi rychle vyhledávat ty správné konkrétní produkty na běžícím dopravním páse ve shluku různý produktů a přenášet je na jiné pásy nebo přesně umisťovat do krabiček. Například vybírat různé bonbóny přepravované na dopravníku a umísťovat je přesně na pro ně určená místa například v bonboniéře. Zvláště v potravinářství či jiném lehkém průmyslu v podobných aplikacích ve výrobnách s velmi rychlou produkcí a objemem produktů je asi hlavní uplatnění tohoto robota.
Společnost Adept Technologies založená v roce 1983, která patří mezi jednoho z největšího výrobce robotů v USA, pak v roce 2015 přešla pod "křídla" nadnárodní společnosti Omron, která hledala doplnit svoje široké portfolio automatizační techniky o robotické systémy. Vznikla tak společnost Omron Adept Technologies, Inc., která se tak stala aktuálně jedním s lídrů v oblasti inteligentních vizuálně naváděných robotických systémů.
Popis balícího robota Omron Adept Quattro
 Adept Quattro je již dlouhodobě hlavní představitel paralelních robotů speciálně navržený pro vysokorychlostní balení, dobalování produktů a manipulaci s materiály o hmotnosti do 2 kg (užitečné zatížení). Jde o robota, který disponuje unikátní mechanickou pohyblivou konstrukcí tvořenou soustavou čtyř zdvojených ramen na kloubových čepech s rotační uchopovací plošinou. Ta umožňuje velmi rychlé vybírání, přenášení a umisťování produktů. Ramena jsou poháněná čtyřmi stejnými elektromotory, které přes soustavu pák způsobují samotný poziční i rotační pohyb pracovní uchopovací plošiny. Systém je doplněn kamerovým systémem, kde na základě jeho obrazu se řídí výsledný pohyb. Velké zrychlení i výkon robot dosahuje ve velkém prostoru, v kruhové ploše o průměru až 1300 mm (verze Adept Quattro s650H) nebo až 1600 mm (verze Adept Quattro s800H).
Adept Quattro je již dlouhodobě hlavní představitel paralelních robotů speciálně navržený pro vysokorychlostní balení, dobalování produktů a manipulaci s materiály o hmotnosti do 2 kg (užitečné zatížení). Jde o robota, který disponuje unikátní mechanickou pohyblivou konstrukcí tvořenou soustavou čtyř zdvojených ramen na kloubových čepech s rotační uchopovací plošinou. Ta umožňuje velmi rychlé vybírání, přenášení a umisťování produktů. Ramena jsou poháněná čtyřmi stejnými elektromotory, které přes soustavu pák způsobují samotný poziční i rotační pohyb pracovní uchopovací plošiny. Systém je doplněn kamerovým systémem, kde na základě jeho obrazu se řídí výsledný pohyb. Velké zrychlení i výkon robot dosahuje ve velkém prostoru, v kruhové ploše o průměru až 1300 mm (verze Adept Quattro s650H) nebo až 1600 mm (verze Adept Quattro s800H).


Oba typy robotů Omron Adept Quattro s650H a s800H.
Uvnitř základního těla robota je již zabudovaná skříň výkonových zesilovačů/budičů motorů a jejich kompaktní řídící systém Smart Servo. To umožňuje jednoduchou instalaci robota a minimalizuje požadavek na prostor. Celého robota a jeho funkci pak ovládá externí řídící systém Adept SmartController CX, což je prakticky průmyslové PC s nainstalovaným řídícím softwarem Adept eV+. K němu se dle potřeby a při jeho nastavení připojuje PC s nainstalovaným ACE programovacím softwarem. PC však slouží jen k nastavení provozu robota a samotnou činnost již řídí samo průmyslový počítač a klasické PC může být odpojeno.

Čtyřramenný robot Omron Adept Quattro s řídicím počítačem Adept SmartController CX.
 Systém robota Adept Quattro
Systém robota Adept Quattro
Celý systém robota je tvořen následujícími částmi:
- Základní tělo robota = Quattro robot Base
- AIB (Amplifiers In Base)
- Řídicí systém Adept SmartController CX s nainstalovaným softwarem
- Kamerový systém Adept Vision s AVI nebo s AdeptSight rozhraním
- Ovládací panel s E-STOP tlačítkem
- Adept Windows software pro OS Windows
- Ethernet TCP/IP komunikace robota s PC
Quattro Robot Base
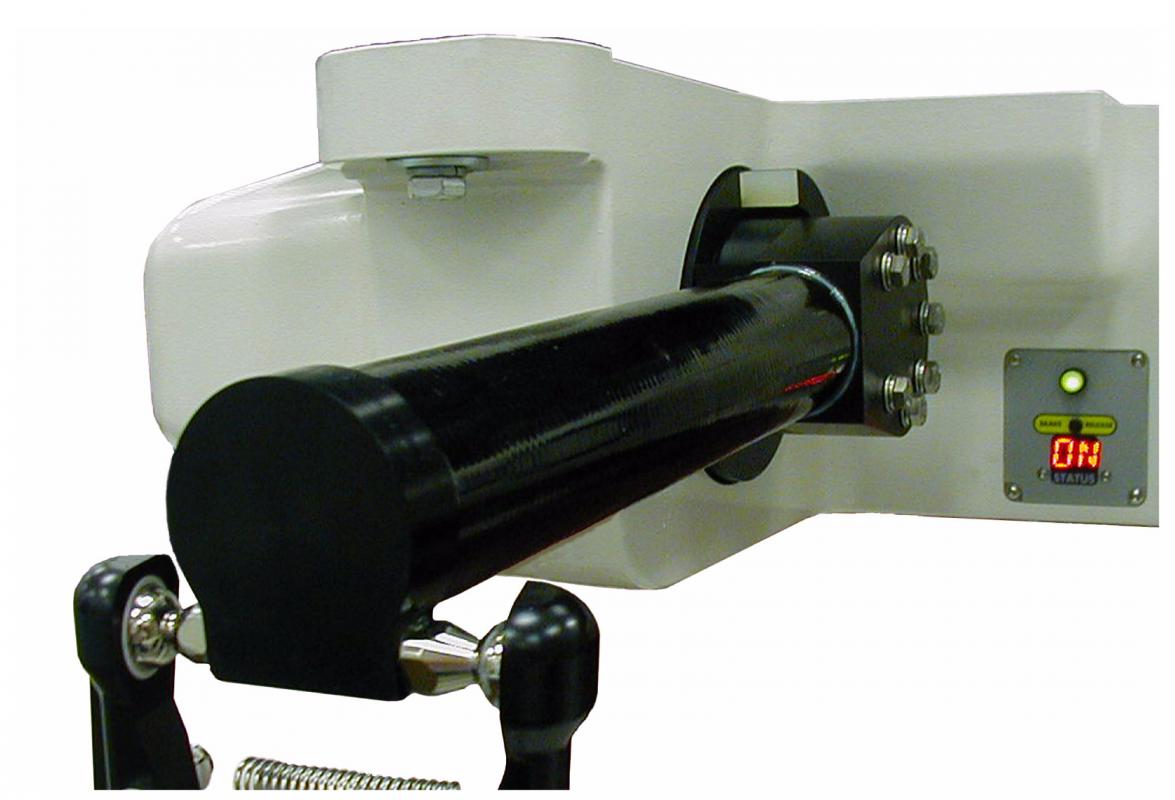
Základ robota tvoří masivní základní tělo (Base) z hliníkové slitiny, ve kterém jsou upevněny čtyři stejné motory (pod kryty motorů = Motor Cover) a výkonová řídící jednotka AIB (Amplifiers-In-Base). Přímo na hřídele motorů jsou připojená 4 krátká hlavní masivní vnitřní ramena (Inner Arm) z uhlíkových vláken. Na každé hlavní rameno jsou pak přes kulové čepy připojena 2 subtilní koncová vnější ramena (Outer Arms), která jsou společně spojena zajímavou rotační plošinou (Platform) se spojkou pro připevnění uchopovacích nástrojů (Tool Flange). Plošina, která je čistě mechanická (tzn. neobsahuje žádné další motorky), přes důmyslnou soustavu pák a čepů převádí pohyb (natáčení) všech 4 motorů na kartézský pravoúhlý plošný pohyb plošiny a Theta rotaci spojky nástroje robota. Podle provedení konstrukce plošiny se dosahuje otáčení spojky buď pouze o +/- 50 °, ale při větší otáčecí síle (tedy i uchopovací síle) nebo v rozsahu +/- 180°, ale s menší silou. Zatímco v první variantě je upevňovací spojka přímo připevněna na čepové spojení a otáčení plošiny se na ni přenáší v poměru 1:1, v druhém případě se využívá řemenicový převod 4:1.
Základní tělo zároveň obsahuje čtyři montážní úchyty (Mounting Pads) pro upevnění na nosný rám. Robot se tedy upevňuje k nosné konstrukci zespodu jako podvěs.
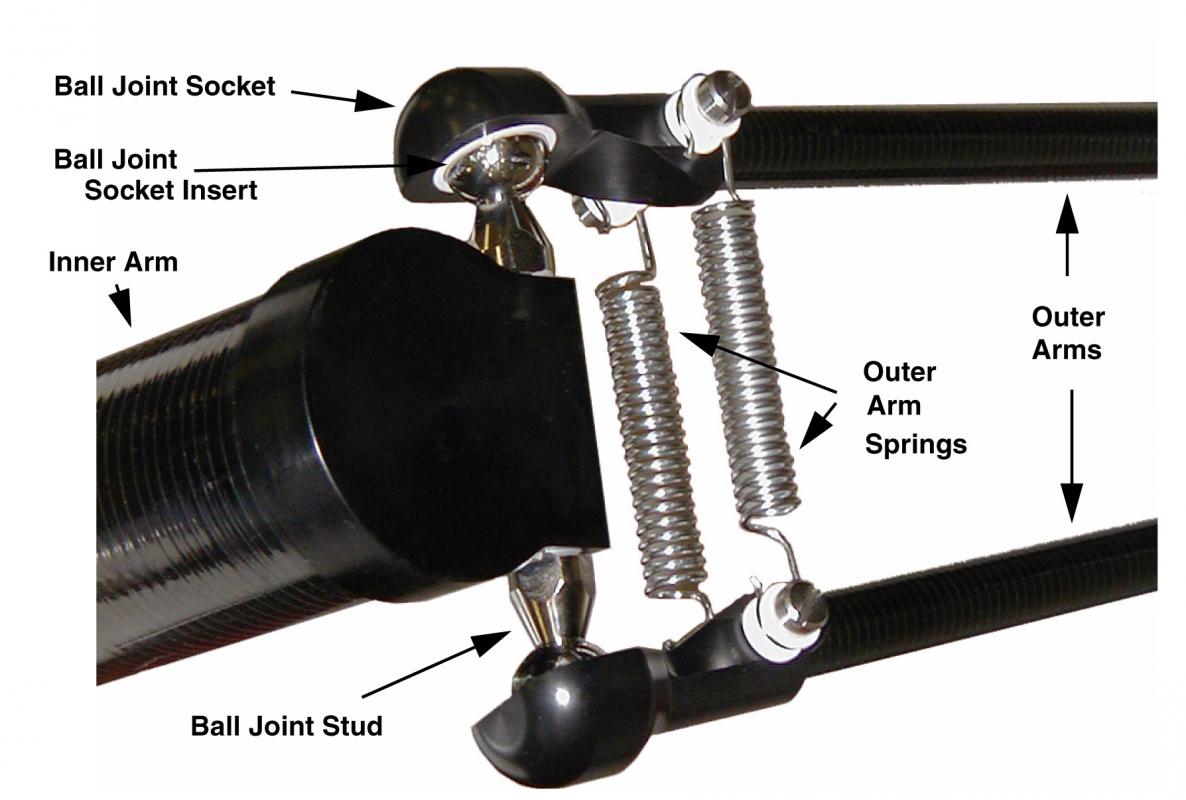
Detailní fotografie hlavního vnitřního ramene robota (vlevo) a provedení kloubu mezi hlavním a dvojitým koncovým ramenem (vpravo).
Jednotka Adept AIB
Část robota označená jako AIB (Amplifiers In Base) přestavuje výkonovou regulační jednotku pro řízení pohybu, tedy konkrétně elektromotorů ramen. Je tvořena výkonovými elektronickými obvody zesilovačů/budičů motorů a ovládaní řídícím systémem Smart Servo pro přesnou regulaci pohybu v uzavřené smyčce (closed-loop servo control).
 Vše je společně vestavěno ve speciální žebrované skříni pro zajištění dostatečného chlazení všech výkonových prvků bez potřeby použití větráku. Mimo to jednotka poskytuje binární vstupy a výstupy pro potřeby přímého řízení a signalizace.
Vše je společně vestavěno ve speciální žebrované skříni pro zajištění dostatečného chlazení všech výkonových prvků bez potřeby použití větráku. Mimo to jednotka poskytuje binární vstupy a výstupy pro potřeby přímého řízení a signalizace.
Jednotku Adept AIB charakterizuje:
- Digitální vstupy/výstupy (12 / 8)
- Bezvětrákové chlazení
- Taktování řízení motorů frekvencí 8 kHz
- Komutace sinusovým průběhem
- Teplotní ochrana a měření teploty na všech motorech a zesilovačích
Řídicí počítač Adept SmartController CX
 Adept SmartController CX je hlavní řídicí počítač pro řízení celé funkce robota a jeho naprogramování. Provádí tedy jak řízení výsledného pohybu ramen robota, tak zpracování obrazu z kamerového systému na jehož základě se robot orientuje, vybírá ty správné produkty a zařazuje je na správná místa (motion and vision controllers). Zároveň podporuje i možnost sledování nebo regulaci pohybu dopravníku.
Adept SmartController CX je hlavní řídicí počítač pro řízení celé funkce robota a jeho naprogramování. Provádí tedy jak řízení výsledného pohybu ramen robota, tak zpracování obrazu z kamerového systému na jehož základě se robot orientuje, vybírá ty správné produkty a zařazuje je na správná místa (motion and vision controllers). Zároveň podporuje i možnost sledování nebo regulaci pohybu dopravníku.
Jednotka Adept SmartController CX je univerzální pro celý sortiment robotů Omron Adept, tedy i pro SCARA roboty Cobra a 6-osé roboty Viper atd.

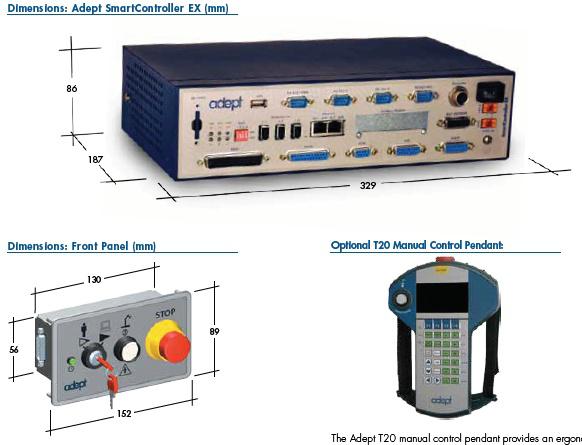
Ovládací jednotka robot Adept SmartController CX je tvořená průmyslovou PC jednotkou a případně i přídavnými ovládacími prvky, které však přímo pro provoz robota nejsou nutné.
Komunikace mezi řídicí jednotkou motorů Adept SmartServo v AIB a právě řídicím počítačem probíhá prostřednictvím rozhraní IEEE 1394, zatímco jeho programování se provádí z běžného PC prostřednictvím klasického rychlého Gigabit Ethernetového rozhraní s konektorem RJ-45 a s robotem dodávaného PC programu ACE pro OS Windows. Pro základní ovládání robota i bez připojeného PC je možné k hlavní řídící jednotce připojit ovládací panel (Front Panel). Řídící počítač se napájí ze zdroje 24 VDC.
Pro potřeby běhu robota je nutné propojení zesilovací a budicí jednotky Adept AIB a řídicí počítačové jednotky Adept SmartController prostřednictvím IEEE1394 kabelu
Technické parametry
 Označení: Adept Quattro s650H / Adept Quattro s800H
Označení: Adept Quattro s650H / Adept Quattro s800H- Pracovní rádius: 650° / 800°
- Počet ramen: 4
- Užitečné zatížení: max. 2 kg
- Pracovní prostor
- Plošný průměr: 1300 mm / 1600 mm
- Výška: standardně 250 mm, max. 500 mm
- Rotace: +/- 180°
- Opakovatelnost:
- Pozice: +/- 0,1 mm (s650H) / 0,15 mm (s800H)
- Úhlová: +/- 0,4°
- Max. rychlost: 10 m/s
- Max. zrychlení: 150 m/s2
- Napájení:
- 24 VDC
- 230 VAC / 50 Hz
- Krytí: IP65
- Provozní teplotní rozsah: 1 - 40°C

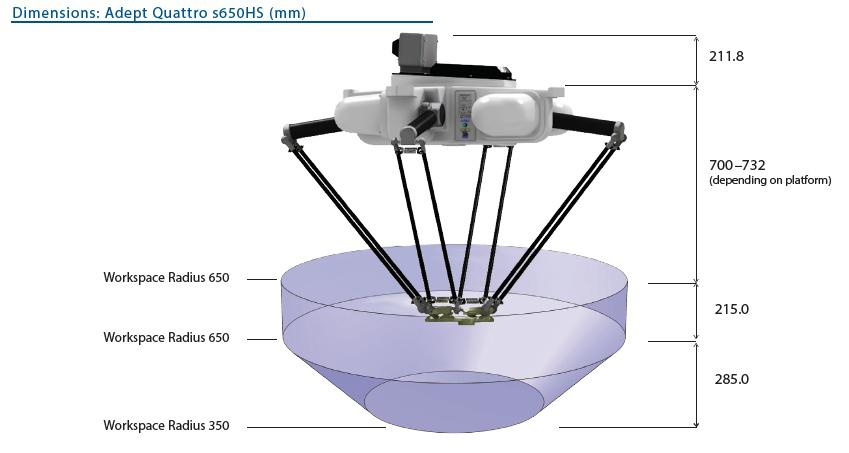
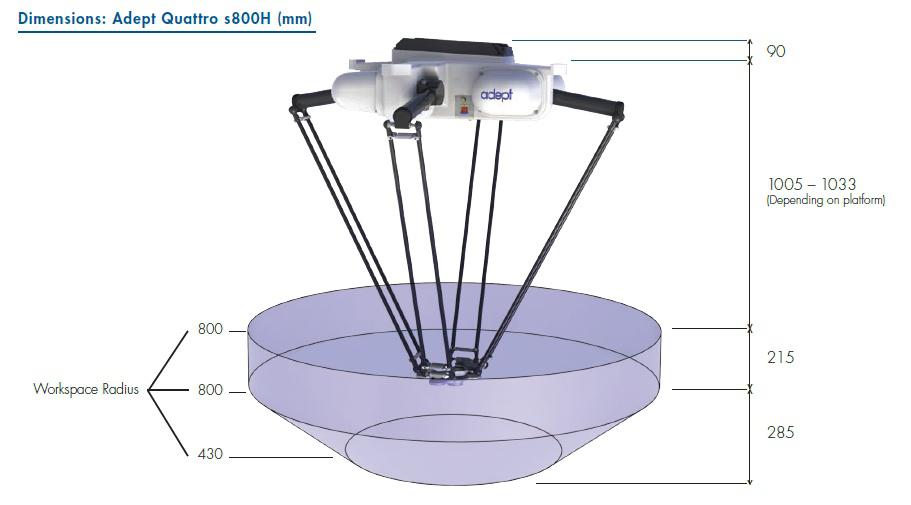
Manipulační / provozní prostor delta robotů Omron Adept Quattro s650H a s800H.

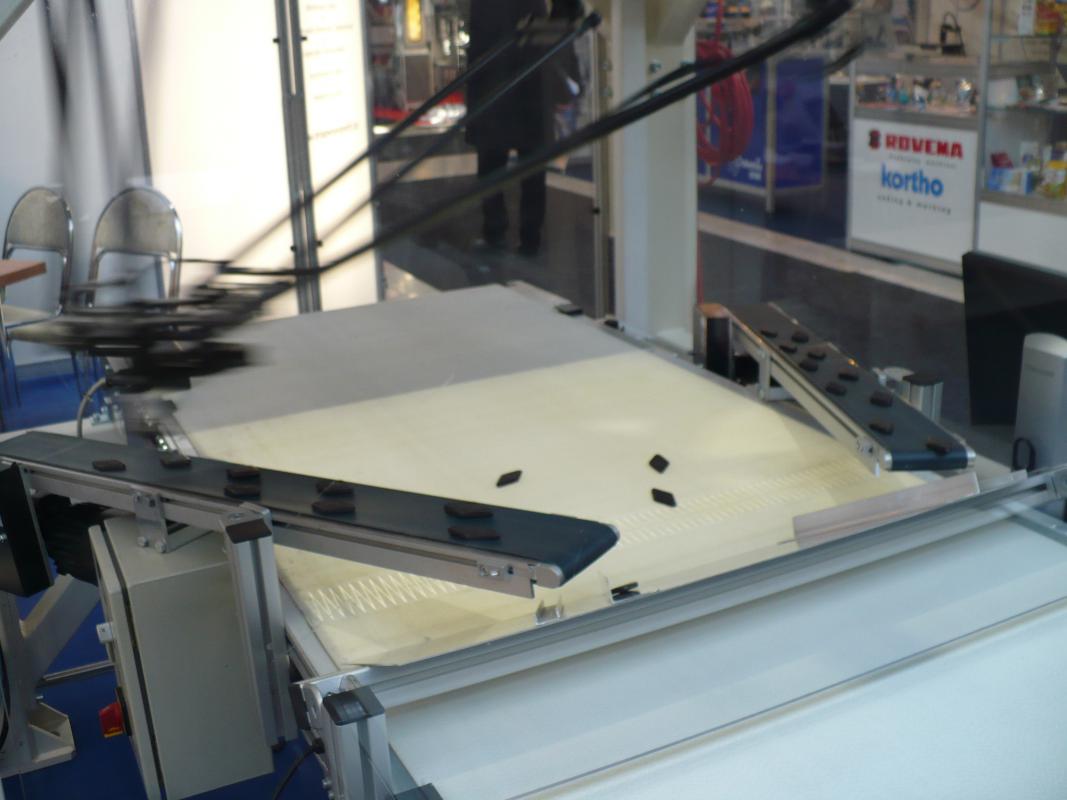
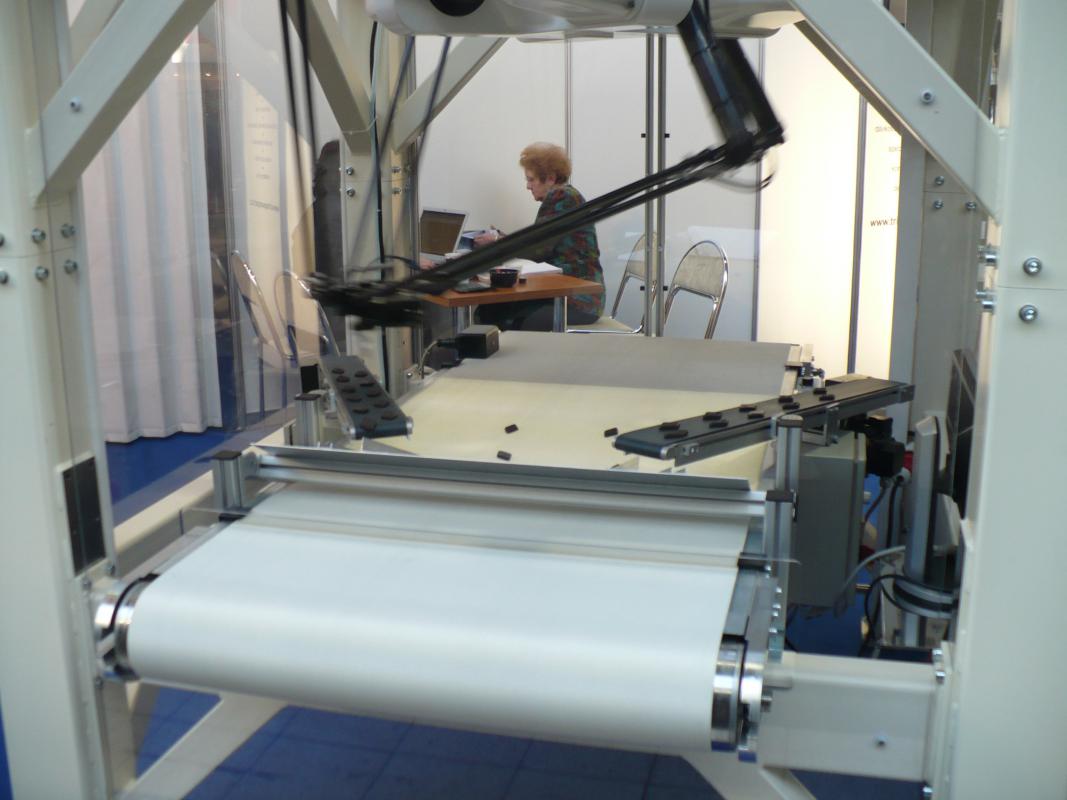
Příklady funkce robota Omron Adept Quattro ukázce pravidelného vybírání přesně tvarovaných produktů a jejich přesné umisťování na úzké černé odváděcí pásy.
DOWNLOAD & Odkazy
- Domovská stránka výrobce - Omron Adept Technologies, Inc: www.adept.com
- Přímý odkaz webové stránky robot Adept Quattro s650H: http://www.adept.com/products/robots/parallel/quattro-s650h/general
- Přímý odkaz webové stránky robot Adept Quattro s800H: http://www.adept.com/products/robots/parallel/quattro-s800h/general
- Domovská stránka společnosti OMRON, prodávající robory ADEPT v ČR: https://omron.cz
- Další články z oblasti automatizace najdete na stránkách serveru automatizace.HW.cz



