
 Franka Production 3 (FP3) je průmyslově certifikovaná platforma robotů německé společnosti FRANKA EMIKA speciálně konstruovaná pro vysokou citlivost a jemnou regulaci úrovně pracovní síly. Prakticky jde o kolaborativní roboty vhodné pro aplikace vyžadující velkou uchopovací i manipulační citlivost. Díky tomu, že mohou pracovat i v těsné blízkosti lidí, mají malé požadavky na prostor a současně poskytují nekomplikovanou instalaci typu plug-and-use. Různá rozhraní pro periferní zařízení z nich činí vhodný nástroj pro efektivní automatizaci různých úkolů manipulace s malými a lehkými předměty.
Franka Production 3 (FP3) je průmyslově certifikovaná platforma robotů německé společnosti FRANKA EMIKA speciálně konstruovaná pro vysokou citlivost a jemnou regulaci úrovně pracovní síly. Prakticky jde o kolaborativní roboty vhodné pro aplikace vyžadující velkou uchopovací i manipulační citlivost. Díky tomu, že mohou pracovat i v těsné blízkosti lidí, mají malé požadavky na prostor a současně poskytují nekomplikovanou instalaci typu plug-and-use. Různá rozhraní pro periferní zařízení z nich činí vhodný nástroj pro efektivní automatizaci různých úkolů manipulace s malými a lehkými předměty.
Franka Production 3 (FP3) je průmyslově certifikovaná platforma robotů německé společnosti FRANKA EMIKA speciálně konstruovaná pro vysokou citlivost a jemnou regulaci úrovně pracovní síly s nekomplikovanou instalací typu plug-and-use.
Kdo je FRANKA EMIKA?
 FRANKA EMIKA je mnichovská deeptech společnost založená Sami a Simonem Haddadinovými v roce 2016. Nemalou měrou i díky podpoře zkušených odborníků společnost rostla a dále roste a nyní má kolem 200 zaměstnanců. FRANKA EMIKA se již dnes vnímá jako průkopník robotiky s lidským hmatem. Takoví roboti jsou považováni za hbité, bezpečné a s obratností srovnatelnou s lidskou paží.
FRANKA EMIKA je mnichovská deeptech společnost založená Sami a Simonem Haddadinovými v roce 2016. Nemalou měrou i díky podpoře zkušených odborníků společnost rostla a dále roste a nyní má kolem 200 zaměstnanců. FRANKA EMIKA se již dnes vnímá jako průkopník robotiky s lidským hmatem. Takoví roboti jsou považováni za hbité, bezpečné a s obratností srovnatelnou s lidskou paží.
Zatímco produkty FRANKA EMIKA jsou navrhovány, vyvíjeny a vyráběny výhradně v Německu, online platforma FRANKA World propojuje zákazníky, partnery, vývojáře a roboty po celém světě. Umožňuje centralizovanou správu a dálkové ovládání robotů FRANKA EMIKA a také přístup k rostoucímu ekosystému akreditovaného softwaru a hardwaru
 Robotické rameno Franka Production 3 s hmatovými schopnostmi
Robotické rameno Franka Production 3 s hmatovými schopnostmi

Robotický systém Franka Production 3 zahrnuje jak samotné rameno, tak i jeho ovládací jednotku a komponenty. Silově citlivé a agilní rameno se vyznačuje rozsahem pohybu 7 DOF (7 os pohybu) se snímači točivého momentu na každém kloubu. Dodává se s užitečnou hmotností 3 kg, dosahem 855 mm a pokrytím pracovního prostoru 94,5 %. Hodnota opakovatelnosti pozice je +/- 0,1 mm (ISO 9283) se současně minimální odchylkou dráhy i při vysokých rychlostech. Maximální rychlost koncového efektoru je 2 m/s.
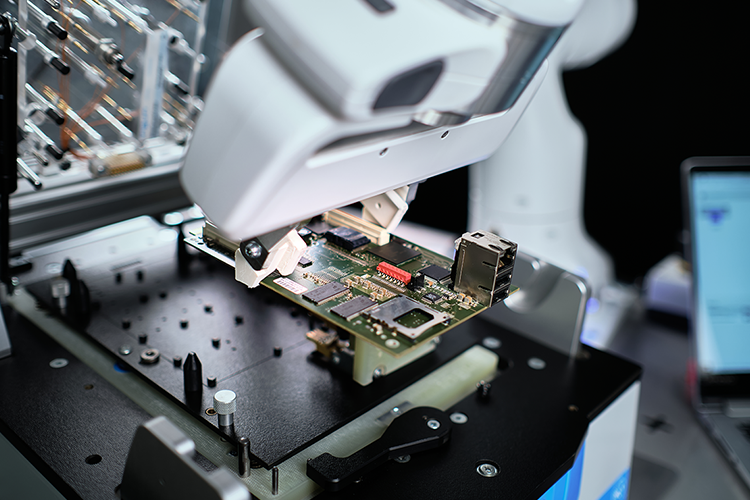 Mimořádná citlivost na kontaktní síly (Force Sensitivity) je dosažena díky vlastním vyráběným digitálním snímačům točivého momentu ve všech 7 osách pracujícím s rozlišením na 13 bitů. Absolutní poloha / natočení ramene se pak měří enkodéry s rozlišením na 14 bitů. Díky tomuto rozlišení, vysoké přesnosti a opakovatelnosti tak umožňují dynamické snímání prostředí. Robot proto může vyvíjet i velmi malé síly a pohyby k provádění velmi přesných a detailních úkolů, jako je spojování, velmi přesné zasouvání / vkládání dílů a šroubování. Nepřetržité a přesné jemné řízení sil je také požadavkem pro aplikace, jako je sledování obrysů, leštění a broušení. Ramena jsou však celkově vybavena více než stovkou různých snímačů, které ve spojení s řídicí algoritmy a interním modelem umožňují rychlou detekci a reakci na nechtěné kolize v řádu milisekund. To má tato robotická ramena více přiblížit ke schopnosti napodobovat lidskou obratnost v jemných manipulativních úkolech a současně spolehlivě koordinovat spolupráci s lidmi.
Mimořádná citlivost na kontaktní síly (Force Sensitivity) je dosažena díky vlastním vyráběným digitálním snímačům točivého momentu ve všech 7 osách pracujícím s rozlišením na 13 bitů. Absolutní poloha / natočení ramene se pak měří enkodéry s rozlišením na 14 bitů. Díky tomuto rozlišení, vysoké přesnosti a opakovatelnosti tak umožňují dynamické snímání prostředí. Robot proto může vyvíjet i velmi malé síly a pohyby k provádění velmi přesných a detailních úkolů, jako je spojování, velmi přesné zasouvání / vkládání dílů a šroubování. Nepřetržité a přesné jemné řízení sil je také požadavkem pro aplikace, jako je sledování obrysů, leštění a broušení. Ramena jsou však celkově vybavena více než stovkou různých snímačů, které ve spojení s řídicí algoritmy a interním modelem umožňují rychlou detekci a reakci na nechtěné kolize v řádu milisekund. To má tato robotická ramena více přiblížit ke schopnosti napodobovat lidskou obratnost v jemných manipulativních úkolech a současně spolehlivě koordinovat spolupráci s lidmi.


Montáž, ovládání a nastavování ramen FP3
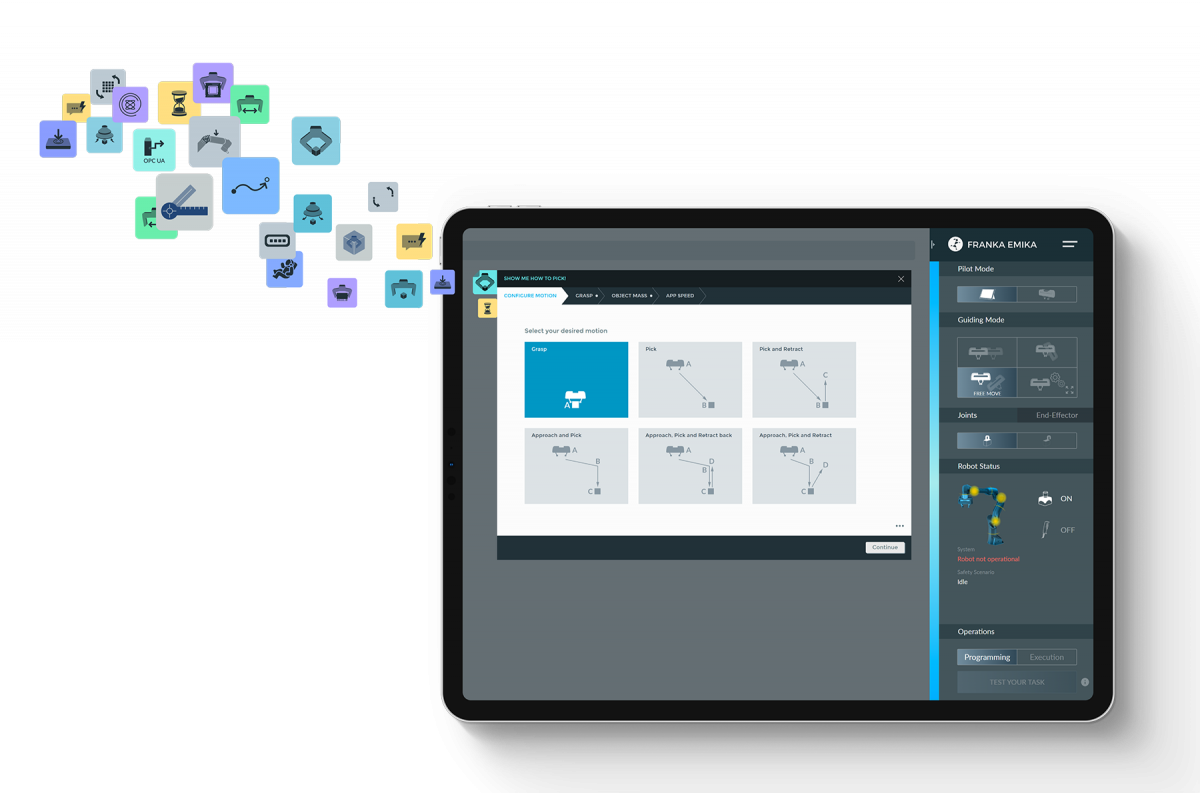
 FP3 si klade za cíl zaujmout také intuitivním ovládáním, jednoduchým nastavením, plynulým naváděním rukou a bezproblémovou interakcí. Díky intuitivním rozhraním nejsou vyžadovány žádné znalosti programování, čímž mají roboti FP3 umožnit každému jednotlivci se rychle stát odborníkem na roboty a přeměnit své znalosti procesů v automatizaci robotů. Režim konfigurace je navrženo tak, aby nastavení bylo přímočaré a ruční navádění provádělo bez námahy. Výrobce uvádí, že díky jeho Plug-and-Use systému je možné od doručení provést kompletní nastavení pro první použití za méně než 30 minut.
FP3 si klade za cíl zaujmout také intuitivním ovládáním, jednoduchým nastavením, plynulým naváděním rukou a bezproblémovou interakcí. Díky intuitivním rozhraním nejsou vyžadovány žádné znalosti programování, čímž mají roboti FP3 umožnit každému jednotlivci se rychle stát odborníkem na roboty a přeměnit své znalosti procesů v automatizaci robotů. Režim konfigurace je navrženo tak, aby nastavení bylo přímočaré a ruční navádění provádělo bez námahy. Výrobce uvádí, že díky jeho Plug-and-Use systému je možné od doručení provést kompletní nastavení pro první použití za méně než 30 minut.
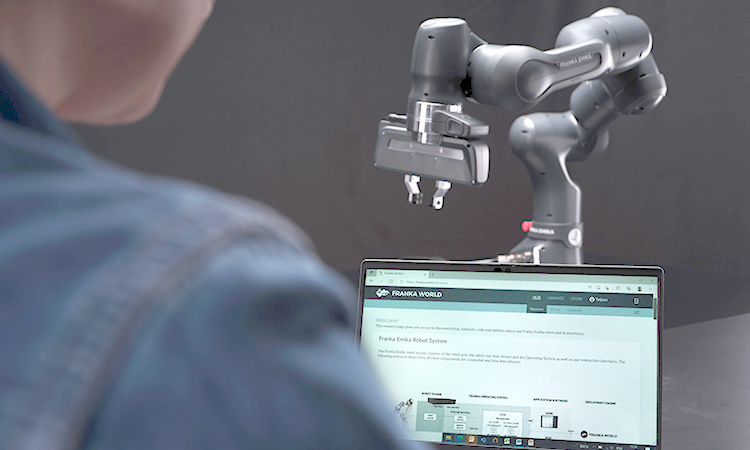
 Samotné rameno a jeho ovládání má jít mechanicky i elektricky nainstalovat za "několik minut". Systém lze napájet z univerzálních elektrických zásuvek a je plug-and-use, tedy k propojení ramene a jeho ovládání je potřeba pouze jeden kabel. K nastavování není potřeba žádné vyhrazené zařízení operátora. K robotu lze připojit jakýkoli počítač, notebook nebo tablet a spustit uživatelsky přívětivé webové rozhraní robota. Webové rozhraní také znamená, že není nutné stahovat spoustu dalšího a objemného softwaru.
Samotné rameno a jeho ovládání má jít mechanicky i elektricky nainstalovat za "několik minut". Systém lze napájet z univerzálních elektrických zásuvek a je plug-and-use, tedy k propojení ramene a jeho ovládání je potřeba pouze jeden kabel. K nastavování není potřeba žádné vyhrazené zařízení operátora. K robotu lze připojit jakýkoli počítač, notebook nebo tablet a spustit uživatelsky přívětivé webové rozhraní robota. Webové rozhraní také znamená, že není nutné stahovat spoustu dalšího a objemného softwaru.
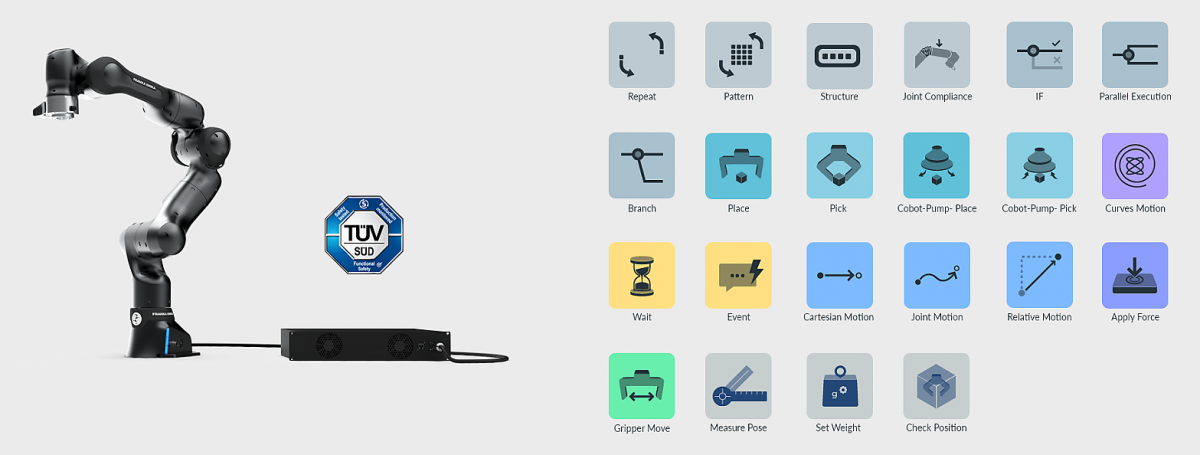
 Programové aplikace, tedy to, co má robot provádět, se vytváří ve formě skládání "stavebních kamenů" (bloků realizující různé funkce). Ty jsou pak dostupné ve Franka App Store portálu. Tedy něco na způsob známého obchodu s aplikacemi Google Play. Díky tomu lze snadno kombinovat různé bloky pracovních postupů pro automatizaci výrobních procesů, jako je uchopení, zasunutí, vložení, šroubování. Každý blok aplikace obsahuje kontextovou nabídku, kde je uživatel interaktivně veden nejen k zadávání parametrů (jako je například rychlost a síla), ale také i k nastavení pozic robota pomocí animovaných demonstrací. Aplikace lze také přetahovat na časovou osu a pouštět do sekvence.
Programové aplikace, tedy to, co má robot provádět, se vytváří ve formě skládání "stavebních kamenů" (bloků realizující různé funkce). Ty jsou pak dostupné ve Franka App Store portálu. Tedy něco na způsob známého obchodu s aplikacemi Google Play. Díky tomu lze snadno kombinovat různé bloky pracovních postupů pro automatizaci výrobních procesů, jako je uchopení, zasunutí, vložení, šroubování. Každý blok aplikace obsahuje kontextovou nabídku, kde je uživatel interaktivně veden nejen k zadávání parametrů (jako je například rychlost a síla), ale také i k nastavení pozic robota pomocí animovaných demonstrací. Aplikace lze také přetahovat na časovou osu a pouštět do sekvence.
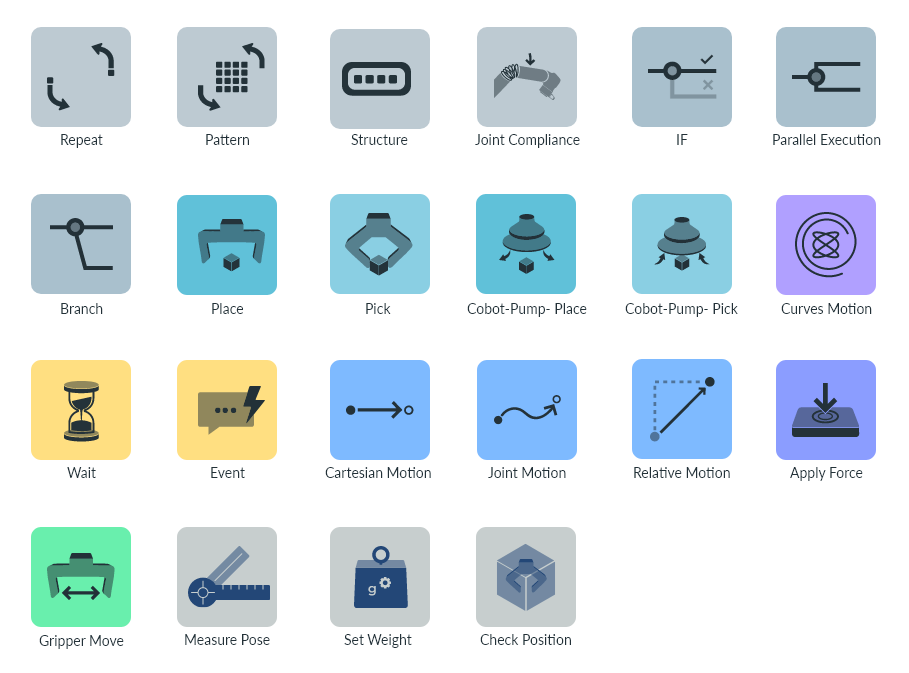
Příklady stavebních bloků pro programování funkcí robota.
 Aplikace Workflows pak navíc umožňují rychlou rekonfiguraci úloh a tedy snadné a rychlé přizpůsobení požadavkům dynamických továren. Jednotlivé úlohy lze rychle uložit, zkopírovat, upravit a znovu použít nebo přenést na více robotů, čímž se výrazně sníží náklady na nastavení.
Aplikace Workflows pak navíc umožňují rychlou rekonfiguraci úloh a tedy snadné a rychlé přizpůsobení požadavkům dynamických továren. Jednotlivé úlohy lze rychle uložit, zkopírovat, upravit a znovu použít nebo přenést na více robotů, čímž se výrazně sníží náklady na nastavení.
Nakonec je tu i grafické real-time uživatelské bezdrátové ovládací rozhraní Pilot, které je pohodlně po ruce na rameni robota. Obsahuje klávesové zkratky pro bezproblémovou navigaci na ploše, ovládání integrovaných koncových efektorů, učení pozic robota pomocí plynulého navádění rukou a přepínání mezi nastavitelnými režimy navádění.
 Základní postup programování je tedy následující:
Základní postup programování je tedy následující:
- Přetáhnout aplikace na časovou osu.
- Nakonfigurovat je a naučit pozice robota předvedením.
- Spustit úkol.
Nastavitelné režimy navádění navíc kompenzují gravitaci a tření a snižují vnímanou hmotnost až na faktor 60. To zajišťuje hladkou a elegantní interakci práce mezi člověkem a strojem.


Nastavení je interaktivní a využívá skládání sekvence stavebních bloků provozních funkcí a ručního navádění pozic.
 Chapadla přímo připravená pro FP3
Chapadla přímo připravená pro FP3

FRANKA EMIKA pak na svém webovém portálů nabízí i různé podpůrné prostředky, jako například různé uchopovače vlastní výroby i od různých subdodavatelů. Základním prvkem je pak dvouprsté citlivé chapadlo Franka Hand s vyměnitelnými špičkami prstů, plně integrované se softwarem Franka Production 3, takže je plug-and-use. Konečky prstů lze tak snadno změnit a přizpůsobit uchopovaným předmětům, např. použít i různé vlastní 3D tištěné konečky prstů.
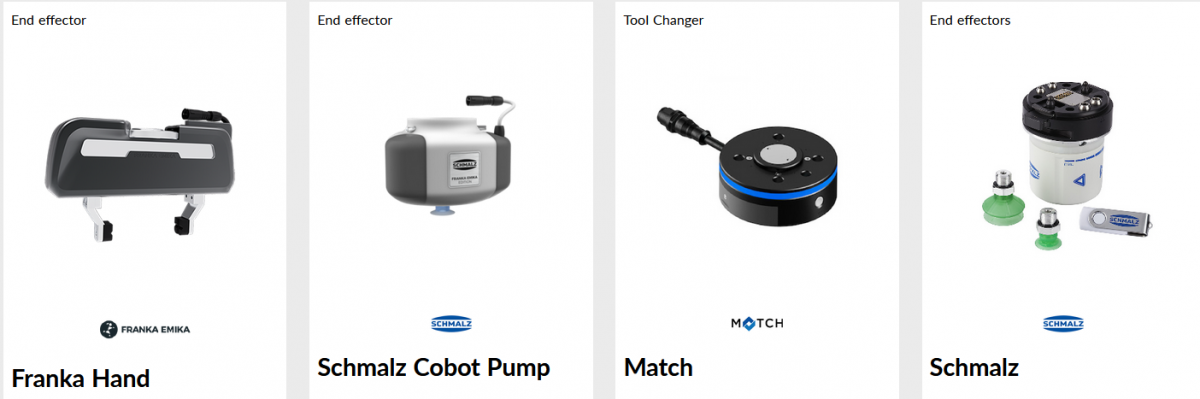
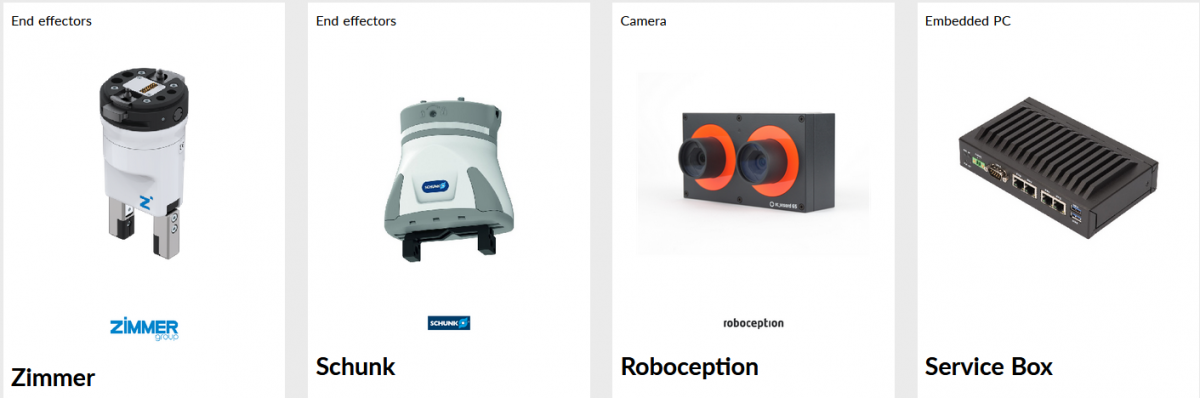
Příklady dostupného příslušenství v e-shopu FRANKA EMIKA.
Základní parametry robotů FRANKA EMIKA FP3:
 Užitečná nosnost: 3 kg
Užitečná nosnost: 3 kg- Počet os možného pohybu: 7
- Pracovní dosah: 855 mm
- Pokrytí pracovního prostoru: 94,5 %
- Max. rychlost koncového efektoru: 2 m/s
- Rozlišení absolutní polohy: 14 bitů
- Rozlišení točivého momentu: 13 bit
- Typy pohonů: bezkomutátorové DC motory
- Ložiska: křížová válečková ložiska vysoce tuhá

Odkazy:
- Webové stránky výrobce FRANKA EMIKA: https://www.franka.de



