 V posledních několika letech se již stalo vcelku běžné měření vibrací, nárazů a otřesů prostřednictvím mikromechanických MEMS senzorů zrychlení (MEMS akcelerometrů), které prakticky pracují na mechanicko-elektrickém principu, kde se pohyb způsobený vibrací převádí na elektrický signál. Aby to ale fungovalo musí samozřejmě být zmíněný senzor / akcelerometr napevno připevněn přímo k měřenému objektu. Jenže jsou případy, kdy to není možné. Buď je objekt tak malý, že i nejmenší senzor je pro něj příliš velký, nebo se připevněním senzoru a tím i jeho hmotnosti změní i průběh samotných vibrací (prostě je buď podpoří nebo utlumí nebo změní jejich časový výskyt). Navíc se může změnit vlastní rezonanční frekvence objektu nebo při pohybu změnit jeho odpor vzduchu.
V posledních několika letech se již stalo vcelku běžné měření vibrací, nárazů a otřesů prostřednictvím mikromechanických MEMS senzorů zrychlení (MEMS akcelerometrů), které prakticky pracují na mechanicko-elektrickém principu, kde se pohyb způsobený vibrací převádí na elektrický signál. Aby to ale fungovalo musí samozřejmě být zmíněný senzor / akcelerometr napevno připevněn přímo k měřenému objektu. Jenže jsou případy, kdy to není možné. Buď je objekt tak malý, že i nejmenší senzor je pro něj příliš velký, nebo se připevněním senzoru a tím i jeho hmotnosti změní i průběh samotných vibrací (prostě je buď podpoří nebo utlumí nebo změní jejich časový výskyt). Navíc se může změnit vlastní rezonanční frekvence objektu nebo při pohybu změnit jeho odpor vzduchu.
Prostě a dobře v mnoha případech je nutné vibrace a otřesy měřit a analyzovat bezkontaktně. Zde se pak nabízí buď zvuk nebo světlo. Ale s ohledem na miniaturní pohyby vibrujícího objektu a často jejich vysokou frekvenci je zvuk nevyhovující. Zůstalo nám tedy světlo, které lze dnes v dostatečné kvalitě (úzký paprsek, stálost vlnové délky, jedna vlnová délka apod.) generovat laserem.

Základní princip optického měření vibrací
Stejně jako u běžných akustických radarů pracujících na principu tzv. Dopplerova jevu, stejný princip se dá využít i v tomto případě u světla. Prakticky se dá říct, že jde tak trochu o optický radar. Jak si asi každý pamatuje ze školy, dopplerův jev způsobuje změnu frekvence zvuku při odrazu od pohybujícího se tělesa. Změna frekvence je pak úměrná nejen frekvenci / rychlosti šíření zvuku, ale i rychlosti pohybu samotného tělesa. Pokud tedy známe parametry vysílaného zvuku, může z odraženého (vráceného a nasnímaného) signálu zpětně přesně vypočítat rychlost onoho tělesa.

Základní princip bezkontaktního měření vibrací je založen na známém Dopplerově jevu využívaném v radarech, který je zde aplikovaný na světlo. Tzn. pohybující objekt mění frekvenci a fázi od objektu odráženého laserového paprsku světla.
|
U optického měření vibrací je to podobné, pouze s tím rozdílem, že změna frekvence vlivem pohybu objektu je jen cca v řádu 10 MHz vzhledem k obrovské frekvenci světla cca 500 THz (rychlost 1 m/s = 3.16 MHz). To znamená, že takovou malou změnu frekvence nelze detekovat přímo a je nutné to vzít oklikou, tedy převést malou změnu na velkou. Již vyzkoušený princip, jak porovnat přímý a odražený paprsek, je použití jejich vzájemné interference v interferometru. Zde se využívá principu superpozice dvou vln, tzn. že pokud jsou obě vlny (přímá k objektu i odražená od objektu) o stejné frekvenci posunuty o 180°, odečtou se a výsledkem je nulový signál. Naopak pokud je jsou obě vlny ve fázi, sečtou se a výsledkem je průběh o velké amplitudě. V běžných optických měřeních s interferometrem se vysílaný laserový paprsek rozdělí na dva, kde jeden pokračuje dále k cílovému objektu a druhý pokračuje do interferometru jako referenční signál. Ten pak interferuje s odraženým signálem od vibrujícího objektu, který je k němu fázově posunutý o Δr vlivem zpoždění průchodem delší dráhy. Pokud je Δr násobkem vlnové délky použitého světla (λ) mění se intenzita výsledného paprsku od 0 do 4násobku intenzity původního paprsku (při násobku 0.5, 1.5, 2.5 ... je intenzita téměř nulová, v násobcích 0, 1, 2, 3 ... je naopak 4násobná). Periodicky se pohybující objekt (vibrující objekt) pak prakticky provádí modulaci intenzity výsledného světelného paprsku vycházejícího z interferometru a dopadající na optoelektrický detektor (snímač), tedy převodník průběhu modulovaného světla na modulovaný elektrický napěťový signál. Změny vzdálenosti objektu o +/- (λ / 2) pak generují změny v jasu světla v rozsahu světlo - tma, což se také označuje jako tmavé a světelné proužky. Posun objektu (amplituda vibrací) je pak tedy dán násobkem poloviny vlnové délky světla počtem proužků. |
Blokové schéma základního interferometru, kde dochází na detektoru k interferenci přímého (referenčního) a odraženého paprsku.
Při prodlužování délky trasy odraženého signálu (tj. pohybu povrchu měřeného objektu) vzniká na detektoru interferometru periodická změna jasu světla. |
Způsoby určování parametrů vibrací (metoda měření "Out-of-Plane"):
- "Počítání" světlých a tmavých a proužků (minim a maxim signálu) na detektoru = zjištění posuvu = amplituda vibrací (spojeno se změnou fáze dopplerova signálu)
- Zjištění frekvence modulace jasu = zjištění rychlosti = frekvence vibrací (spojeno s frekvencí Dopplerova signálu)
Dopplerův posun však závisí pouze na absolutních hodnotách rychlosti pohybu objektu, ale již nijak nevystihuje směr pohybu, tedy zde nastíněný způsob měření vibrací neumožňuje zjištění směru. To však lze vyřešit pokud se do funkce vyhodnocovacího interferometru zanese jakýsi "offset". Ten vytváří tzv. Braggova mřížka, která když se zařadí to cesty referenčnímu signálu a vytvoří frekvenční offset + 40 MHz. Vznikne tak heterodynní interferometr. Po interferenci se tento frekvenční posuv v signálu projeví jako frekvenčně a fázově modulovaný signál s nosnou frekvencí 40 MHz danou právě Braggovou mřížkou.
Pokud je nutné vyhodnocovat o směr pohybu, je nutné do interferometru vnést offset v podobě konstantního frekvenčního posunu prostřednictvím Braggovi mřížky (offset 40 MHz).
Z pohledu vyhodnocení vzniklého odraženého Dopplerova signál je pak nutné vzít v úvahu, že signál je frekvenčně i fázově modulován, přičemž změna frekvence odpovídá frekvenci měřených vibrací a změna fáze odpovídá amplitudě vibrací. Od této informace se pak samozřejmě odvíjí i vyhodnocení výsledného elektrického signálu získaného z optického snímače za interferometrem.
|
Frekvenční modulace probíhá dle vzorce: |
 |
Pokud tedy provedeme frekvenční demodulaci získáme frekvenci vibrací či rychlost pohybu zaměřené plochy. V rámci dnešního digitálního vyhodnocování s DSP lze dosáhnout v tomto režimu měření rychlosti až do 30 m/s a frekvencí až do 10 MHz.
|
Fázová modulace probíhá dle vzorce: |
 |
Pokud tedy provedeme fázovou demodulaci získáme amplitudu vibrací. V současné době lze dosáhnout měření v rozsahu cca +/- 100 mm s rozlišením několika pikometrů (1 pm = 0,001 nm).
Základní využívané způsoby optického měření vibrací
 |
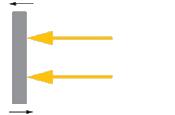
Jednobodové měření vibrací typu "Out-of-Plane (Mimo plochu)" |
|
 |
Dvoupaprskové měření vibrací typu "Out-of-Plane (Mimo plochu)" diferenciální metodou |
|
 |
Dvoupaprskové měření horizontálních vibrací typu "In-Plane (V ploše)" |
|
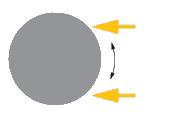 |
Dvoupaprskové měření vibrací rotujících těles a ploch |
Bližší popis měření typu "In-Plane"Zatímco princip měření typu "Out-of-Plane" je myslím si vcelku jasný, princip metody "In-Plane" již je trošku složitější a odlišný. Proto toto trošku podrobnější přiblížení. Jak již bylo naznačeno výše, využívá se zde přímé vyhodnocení interferenčního obrazce vzniklého přímo na měřeném objektu díky ozáření stejného místa dvěma laserovými paprsky. Ty jsou oba vytvořeny z jednoho primárního laserového paprsku, který se prostřednictvím polopropustných zrcadel a hranolu rozdělí na dva. Výsledkem tedy jsou dva paprsky vycházející z měřící hlavice vibrometru, přičemž jeden paprsek má frekvenci f a druhý frekvenci f+fB. Díky tomu po jejich interakci na desce sledovaného objektu vytvoří proužkový interferenční obrazec. Vzdálenost proužků Δs je systémová konstanta daná úhlem paprsků φ, vlnovou délkou použitého světla λ a měřící vzdáleností. |
|
Metoda In-Plane je založena na snímání interferenčního obrazce vytvořeného přímo na měřeném předmětu, který se pohybuje. |

Jestliže se částice povrchu začnou pohybovat v rovině plochy / desky, detektor zaregistruje modulaci vytvořených světlých / tmavých proužků. Rychlost pohybu povrchu je pak úměrná frekvenci modulace. Proto pro zjištění rychlosti pohybu vp či frekvence vibrací je nutné zjistit modulační frekvenci (f = vp / Δs). Ta je nezávislá na směru pohybu, což je však v mnoha případech na závadu, protože detekce směru je někdy požadována. Pro tento účel je do cesty primárnímu paprsku ještě předtím, než se rozdělí na dva a vystoupí ze snímací hlavy, postavena Braggova mřížka, která způsobí frekvenční posuv o 40 MHz, což v interferenčním obrazci způsobí modulaci právě frekvencí 40 MHz. Pak při pohybu vlevo se frekvence snižuje, naopak při pohybu vpravo zvyšuje.
Základní blokové schéma provedení snímací hlavy In-Plane vibrometru.
Vyhodnocení modulovaného signálu
 Výstupní signály ze snímací hlav vibrometrů obsahující informaci o rychlosti (frekvence signálu) a posuvu / pohybu (fáze signálu) měřeného objektu se již v elektrické podobě po kabelech posílají do vyhodnocovací jednotky. Ta dekóduje uvedené parametry pomocí kvadraturního demodulátoru, který ze signálu vygeneruje sinusovou a kosinusovou složku. Ty jsou poté digitalizovány A/D převodníkem vysokou vzorkovací rychlostí na 14 nebo 16bitová čísla pro zajištění co největší rozlišovací schopnosti. Tyto dva signály lze reprezentovat jako rotující vektory jejichž fáze je přímo úměrná posuvu měřeného objektu a vlnové délce světla laseru.
Výstupní signály ze snímací hlav vibrometrů obsahující informaci o rychlosti (frekvence signálu) a posuvu / pohybu (fáze signálu) měřeného objektu se již v elektrické podobě po kabelech posílají do vyhodnocovací jednotky. Ta dekóduje uvedené parametry pomocí kvadraturního demodulátoru, který ze signálu vygeneruje sinusovou a kosinusovou složku. Ty jsou poté digitalizovány A/D převodníkem vysokou vzorkovací rychlostí na 14 nebo 16bitová čísla pro zajištění co největší rozlišovací schopnosti. Tyto dva signály lze reprezentovat jako rotující vektory jejichž fáze je přímo úměrná posuvu měřeného objektu a vlnové délce světla laseru.
Následně se číslicově v rychlých DSP procesorech dekóduje fáze funkcí arctan, čím se získá přesná hodnota posuvu s velkým rozlišením. Informace o rychlosti či případném zrychlení se získají derivací signálu posuvu.

Pro vyhodnocení fáze se využívá kvadraturní demodulátor a digitální zpracování přes funkci inverzní tangenty (arctan).
Závěr
 Jak je z výše uvedeného patrné, je optické bezkontaktní měření vibrací velmi zajímavá a progresivní technologie, i když z pohledu výroby měřícího přístroje dost náročná. Na druhou stranu je tato metoda měření velmi přesná a hlavně nijak neovlivňuje nebo naprosto jen zanedbatelně ovlivňuje měřený objekt. Žádnou jinou dosud dobře výrobně zvládnutou technologií není možné měřit vibrace a posuv na jednotky pikometrů (pm), což jsou tisíciny nanometrů. Již jen tento krátký popis dává jasnou představu o použití a nasazení optických vibrometrů.
Jak je z výše uvedeného patrné, je optické bezkontaktní měření vibrací velmi zajímavá a progresivní technologie, i když z pohledu výroby měřícího přístroje dost náročná. Na druhou stranu je tato metoda měření velmi přesná a hlavně nijak neovlivňuje nebo naprosto jen zanedbatelně ovlivňuje měřený objekt. Žádnou jinou dosud dobře výrobně zvládnutou technologií není možné měřit vibrace a posuv na jednotky pikometrů (pm), což jsou tisíciny nanometrů. Již jen tento krátký popis dává jasnou představu o použití a nasazení optických vibrometrů.
Jejich hlavní uplatnění je v laboratořích, ve vývojových centrech společností, kde se vymýšlejí a testují nové komponenty přístrojů, strojů, zařízení a budov, sofistikovaná a specializovaná servisní centra (například specializované servisy automobilů a jiných strojů), diagnostická centra, společnosti zabývající se diagnostikou a testování vadných komponent, vývojáři nových elektronických komponent a přístrojů, závodní stáje v motocyklových a automobilových šampionátech apod. Prostě všude tam, kde je nutné velmi přesně měřit posuvy či vibrace a nárazy.
Odkazy:
- Domovská stránka společnosti POLYTEC GmdH, výrobce optických bezkontaktních vibrometrů - www.polytec.com nebo www.polytec.de
- Další zajímavé články o technologiích a principech v senzorice a měřících přístrojích najdete na stránkách serveru automatizace.hw.cz



