
Tento článek se zabývá výhodami kolaborativních robotů v provozu a poukazuje na možná rizika a bezpečnostní předpisy. Představíme si koboty s vestavěným bezpečnostním mechanismem, kteří se adaptují jakémukoli prostředí ve výrobě nebo jakémukoli pracovnímu postupu.
Proč přidat kolaborativní roboty?
Průmyslový roboti se ve velkých výrobních závodech dávno osvědčili. Došlo ke zvýšení produkce při současném snížení nákladů. Kompaktní průmyslový roboti přinášejí benefity také do střední a malovýroby. Ve velkém provozu roboti pracují autonomně, kdežto v menší výrobě roboti spolupracují s lidmi v těsné blízkosti(obrázek 1).

Obrázek 1: Malí průmysloví roboti jsou určeni pro provoz, kde spolupracují s lidmi. (Zdroj obrázku: KraussMaffel / KUKA Robotics)
Stejně jako všechny napájené zařízení mohou koboti při nesprávném používání způsobit zranění. Při integraci kobotů do výrobní linky je nutné pečlivě zvážit problematiku bezpečnosti obsluhy. Je nutné vzít v úvahu dosah robota, rychlost pohybu, materiály úchopové části, způsob obsluhy a četnost interakcí.
Organizace OSHA (Occupational Safety and Health Administration) ve Spojených státech, CCOHS v Kanadě a Evropská komise vytvořili provozní předpisy pro bezpečnost průmyslových strojů. OSHA 29 Code of Federal Regulations (CFR) 1910 obsahuje předpisy pro blokování nebezpečných energetických zdrojů v průběhu obslužných operací (§ 147). Dále obsahuje předpis, který chrání před úrazem elektrickým proudem během provozu (§ 333). Tyto předpisy se však vztahují na všechny druhy průmyslových strojů a nemusí nutně držet krok s novými technologiemi. Existuje poměrně málo předpisů přímo pro průmyslové roboty nebo koboty.
Mezi ně patří standard IEC 61508 na funkční bezpečnost, standard ISO 12100 na design pro bezpečnost strojů a standardy ISO 10218-1 a 2, které se zabývají bezpečností pro průmyslové roboty. Nejnovější technická norma ISO / TS 15066 předepisuje požadavky na bezpečnost kolaborativního robota. Pouze některé části této normy se týkají požadavkům na robotické konstrukce systému. Ve zbytku jsou doporučující pokyny pro zajištění bezpečné interakce robotů a lidí.
Posouzení rizik kolaborativních robotů
Bezpečnost kobota začíná v pečlivém posouzení rizika zamýšlené robotické operace a použitém modelu kobota. Je nutné zvážit nejen využití samotného robota, ale celé aplikace a operačního prostředí. Při manipulaci s ostrými kovovými hranami existuje větší riziko poranění než při manipulaci s lepenkovými krabicemi. Podobně se určují rizika pro různý typ chapadla(nástroje). Bude určitě rozdíl, pokud chapadlo obsahuje vrtačku nebo páječku.
Je nutné posoudit celý systém, ve kterém kobot má pracovat. Zaměřit se na pohybové vlastnosti kobota, pracovní plochu, workflow a další faktory, které nám pomohou identifikovat potenciální zdroje rizik v provozu. Jakmile jsou rizika identifikována musí se každý pečlivě zhodnotit. Toto hodnocení spočívá v zařazení jednotlivých rizik do následujících kategorií: zanedbatelné, nízké, střední, vysoké, nebo velmi vysoké riziko. Zároveň se používají tři hlavní kritéria:
- Závažnost potenciálního zranění
- Četnost nebo doba vystavení nebezpečí
- Pravděpodobnost, jak se nebezpečí vyhnout
Reprezentativní příklad vyhodnocení rizik je znázorněn ve stromu na obrázku 2. Závažnost zranění se kategorizuje od minoritních jako jsou pořezání nebo modřiny, které se zcela zahojí během několika dnů až po závažné, které vedou k trvalému poškození nebo smrti. Rozsah expozice se určuje jako minimální(příležitostné) až po vysoké (časté nebo kontinuální). Pravděpodobnost vyhnutí se nebezpečí se pohybuje v rozmezí od pravděpodobného až po situace nemůže nastat.
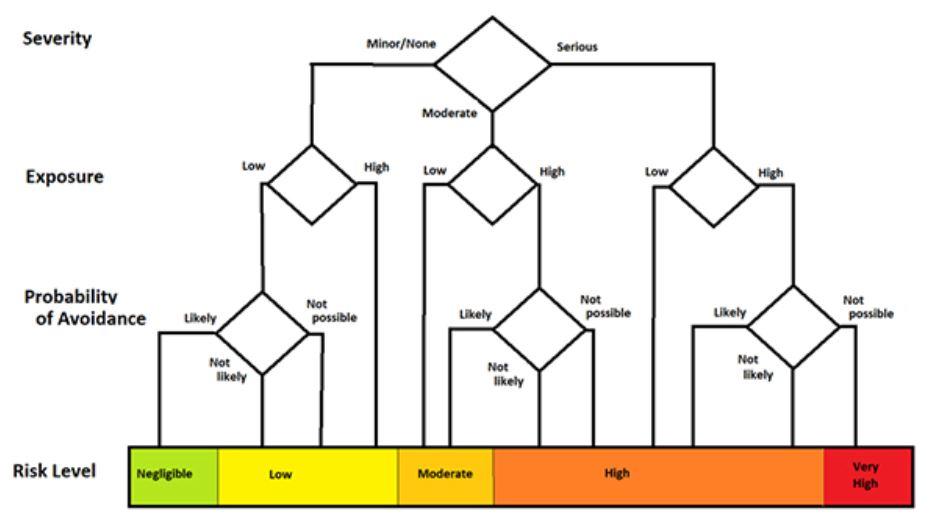
Obrázek 2: Hodnocení rizik vyžaduje zkoumání závažnosti a pravděpodobnosti výskytu možných úrazů. (Zdroj obrázku: Richard A. Quinnell)
Jeden z poznatků, který ISO / TS 15066 přinesl do průmyslu je kvantitativní definice fyzického kontaktu mezi robotem a člověkem, kdy ještě nedochází ke zranění. Tato definice je důležitá zejména v kolaborativních aplikacích, kde je velmi pravděpodobné, že dojde k fyzickému kontaktu. Standard definuje dva typy kontaktu: přechodný a kvazi-statický (obrázek 3).
Situace, v nichž robot může narážet na paže obsluhy je považován za přechodný typ kontaktu. Když se ale lidská ruka dostane do „pasti“ mezi robot a pevný objekt, jako je robotické chapadlo s lisem, kde se ruka dostane mezi lis a stůl, tak tento kontakt je považován za kvazi-statický.
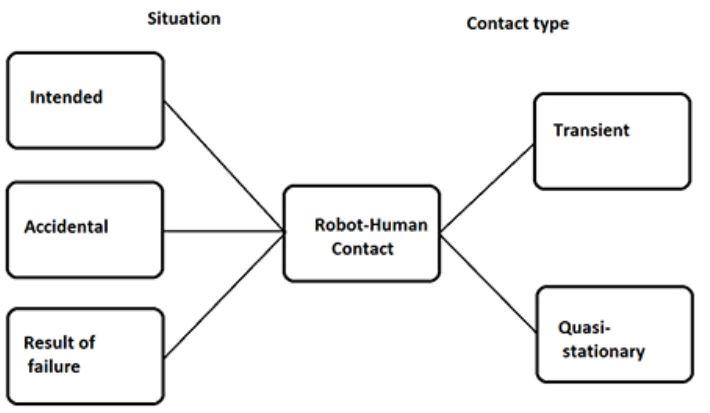
Obrázek 3: Kontakt robot-člověk může být náhodný nebo předpokládaný. Dělí se do dvou kategorií: přechodný nebo kvazi-stacionární. (Zdroj obrázku: Richard A. Quinnell)
Limity pro velikost síly kontaktu je definován dle prahu bolesti. Kolaborativní robot musí být nakonfigurován tak, že jakýkoli kontakt s člověkem bude pod prahem bolesti. Mezní hodnoty síly se liší v závislosti na tom, jaká část těla se podílí na kontaktu. Kontakt s hlavou má definován mnohem nižší práh bolesti než kontakt s ramenem. Dále kvazistatické kontakty mají definovaný nižší práh bolesti než přechodné kontakty.
Jakmile rizika jsou identifikovány a vyhodnoceny je načase si položit otázku, zda se jedná o přijatelné riziko“ Ve většině případů se zanedbatelná a velmi nízká rizika považují za snesitelné. Vše ostatní vyžaduje jejich zmírnění.
Zmírnění rizik
Mezi nejvýhodnější metody snižování rizika patří změna rozvržení robotického pracovního prostoru, aby se eliminovalo nebezpečí. Je běžné, že se pro omezení prostoru mezi člověkem a robotem používají klece. Pokud se člověk dostane do pracovního prostoru robota, dochází k okamžitému vypnutí robota. Tam, kde roboti potřebují sdílet pracovní prostor s lidmi, jsou zapotřebí jiné metody zmírnění rizik.
Průmysl určil čtyři klíčové metody ke spolupráci robot-člověk:
- Monitorované zastavení z hlediska bezpečnosti
- Ruční ovládání
- Sledování rychlosti a separace
- Omezení síly a napájení
Monitorovaná zarážka funguje dobře v aplikacích, kde operátor spolupracuje s robotem pouze za určitých podmínek, jako je nakládka nebo vykládka. Při tomto typu interakce robot pracuje autonomně v chráněném pracovním prostoru, který neustále monitoruje lidskou přítomnost. Pokud se operátor ocitne v pracovním prostoru robota, robot zůstává napájen, ale jakýkoliv pohyb robota je zastaven. Když operátor opustí pracovní prostor, robot automaticky obnoví svou autonomní činnost. Pokud někdo vstoupí do monitorovaného pracovního prostoru bez spuštění bezpečnostní ochrany, systém spustí ochranné zastavení a okamžitě dojde k vypnutí napájení.
V módu ručního ovládání zapne obsluha bezpečnostní ochranu před vstupem do pracovního prostoru robota. Ruční ovládání může zahrnovat pouhé uchopení ramena robota nebo použití ručního ovládacího zařízení.
Monitorování rychlosti a separace je užitečné v situacích, kdy operátor a robot často sdílejí stejný pracovní prostor a operátor se může volně pohybovat v tomto prostoru. V tomto módu systém sleduje lidskou vzdálenost od robota (separaci) a snaží se za všech okolností udržovat minimální vzdálenost mezi nimi (obrázek 4). Když jsou oba v bezpečné vzdálenosti - takže není možný kontakt - robot se může volně pohybovat plnou rychlostí. Pokud se separace sníží, robot bude pokračovat v práci, ale zpomalí se, čímž se sníží úsilí potřebné k úplnému zastavení robota. Když je oddělení příliš malé, robot přejde k bezpečnostnímu zastavení.
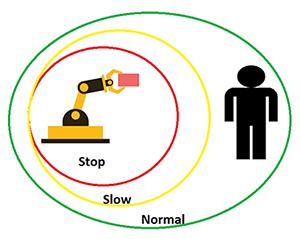
Obrázek 4: Monitorování rychlosti a separace identifikuje zóny kolem robota, které definují jeho bezpečný provoz. (Zdroj obrázku: Richard A. Quinnell)
Definování vzdáleností pro každou fázi procesu vyžaduje pochopení pohybových schopností robotického systému. Systém by měl být navržen tak, že jakmile detekuje člověka pohybujícího se směrem ke chráněnému prostoru, robotické mechanismy se úplně zastaví, ještě dříve, než člověk dosáhne tohoto provozního prostoru.
Aby bylo možné vypočítat vhodné vzdálenosti, musíme vědět:
- Jak rychle se robot a člověk pohybuje
- Reakční doba systému k detekci možného vniknutí
- Jak dlouho trvá, než se robot přestane pohybovat poté, co obdrží příkaz k zastavení
Rozložení pracovního prostoru může pomoci zjednodušit definování a monitorování bezpečnostních zón, rychlosti a separace. Jeden příklad rozvržení zón je na obrázku 5. Pracovní stůl odděluje člověka od operačního prostoru robota, ve kterém se robot může volně pohybovat plnou rychlostí. Robot může automaticky snížit rychlost, když vstoupí do oblastí spolupráce (Collaborative space), které jsou vyznačeny žlutě po stranách. Oblasti jsou stanoveny tak, aby zamezily vznik kvazi-statického kontaktu. Se snížením rychlosti se snižuje také přítlačná síla, a tím se minimalizuje jakékoliv riziko úrazu. Mechanické zarážky mohou zabránit robotickému mechanismu vniknout do obslužné oblasti člověka a eliminovat tak riziko kontaktu. Takové uspořádání vyžaduje pouze minimální monitorování operačního prostoru robota z hlediska vniknutí člověka, aby byla zajištěna vysoká úroveň bezpečnosti systému.

Obrázek 5: Návrh pracovního prostoru s bezpečnostními zóny. (Zdroj obrázku: Richard A. Quinnell)
Vypnutí napájení a omezení síly je zvláště užitečné v aplikacích, kde je vysoce pravděpodobný kontakt člověk-robot. Aby mohl robot použít toto omezení, musí být schopen rychle detekovat a reagovat, když na mechanismus působí neobvyklé síly. Robot by měl být také navržen tak, aby snížil případnou kontaktní sílu. Například tím, že robot nebude mít ostré hrany, rameno nebude obsahovat místa, kde hrozí sevření či robot bude vybaven polstrováním.
Aplikace by měla být navržena tak, aby ke kontaktu mohlo dojít jen ve výjimečných případech. Je třeba pečlivě posoudit k jakému typu kontaktu může nastat (přechodný nebo kvazistatický) a jaké části těla mohou být zasaženy. Aplikace by měla být navržena tak, aby nemohlo dojít ke kvazistatickému kontaktu zejména kontaktu s hlavou, krkem nebo hrdlem.
Bezpečnostní funkce robotického systému
Vývojáři, kteří si vyberou robota pro spolupráci, by měli mít na paměti, jak mohou implementovat jednu nebo více z těchto metod zmírnění rizik. Prodejci robotů se obvykle snaží implementovat dostatek bezpečnostních funkcí přímo do systému, který robota řídí.
Například řada robotických souprav Agilus od firmy KUKA obsahuje ovládací panel smartPAD touch pro ruční ovládání a systémový ovladač KR C4 s integrovanými bezpečnostními prvky. Balíček doplňuje volitelný software KUKA.SafeOperation. Ramena souprav přicházejí s různými délkami dosahu, např. 540 milimetrů (mm) (KR 3 R540), 900 mm (KR 6 R900-2) a 1100 mm (KR 10 R1100-2) (obrázek 6).

Obrázek 6: Kompaktní průmyslový robot KUKA Agilus KR 3 je navržen s důrazem na bezpečnost. Může bezpečně sdílet pracovní prostor a spolupracovat s lidskými operátory, pokud budou při nastavování dodržovány průmyslové standardy. (Zdroj obrázku: Kuka Robotics)
Všechny tři roboti jsou navrženy se zaoblenými povrchy a jsou vybaveny čalouněním, které absorbuje energii při kontaktu. Všechny spoje jsou zakryty, aby se vyloučila všechna nebezpečí sevření. Roboti také nabízejí nastavitelné mechanické zarážky pro klíčové osy pohybu, takže lze fyzicky omezit operační prostor robota. Součástí je smartPAD touch, který pomáhá řešit aplikace, kde je vyžadována ruční obsluha (obrázek 7).

Obrázek 7: Soupravy robotů KUKA obsahují ovládací panely smartPad touch, které umožňují ruční ovládání podle potřeby. (Zdroj obrázku: KUKA Robotika)
Kontrolér KR C4 je dodáván s integrovaným bezpečnostním softwarem, který zahrnuje rutiny pro implementaci bezpečnostních a nouzových zastavení. Kromě toho může software interně sledovat polohu robota a pohyb kolem kterékoli jeho pohybové osy.
Software KUKA.SafeOperation vylepšuje interní monitorování tím, že umožňuje definovat fixní operační buňku: konvexní mnohoúhelník se třemi až deseti rohy, mimo které by se robot neměl nikdy pohybovat (obrázek 7). Kromě toho lze v této buňce definovat až 16 monitorovacích prostorů pomocí kartézských nebo osově specifických souřadnic.

Obrázek 8: Pomocí software KUKA SafeOperation lze definovat operační oblast a modelovat nástroje koncových efektorů, a tím upřesnit sledování polohy. (Zdroj obrázku: KUKA Robotika)
Software SafeOperation umožňuje uživatelům dále modelovat koncový efektorový nástroj na montážní přírubě robota jako sbírku až šesti uživatelsky definovaných koulí, aby se upřesnilo bezpečnostní sledování polohy. Tyto koule se pohybují s ramenem robota. Pokud se rameno nebo koule nástroje během provozu pohybují do nebo z monitorovacího prostoru, software na to bude reagovat ( signalizace poplachu, zpomalení pohybu robota nebo zastavení). Lze tak snadno řídit, jak se robot zachová kdekoli v rozsahu svého pohybu.
Vývojáři, kteří se snaží integrovat robotický systém do pracovního postupu výroby, zejména v kooperativní aplikaci, musí provádět hodnocení rizik a jejich zmírňování, z nichž většina bude specifická pro danou aplikaci. Toto úsilí zahrnuje dodržování všech pokynů a omezení výrobce, řádné školení uživatelů a implementaci monitorovacích systémů a bariér podle potřeby.
Závěr
Roboti a koboti jsou stále vítanou součástí výrobních a jiných pracovních postupů, ale představují potenciální rizika, která se musí v průmyslové automatizace vzít v úvahu. Nově vyvinuté standardy pro bezpečnost robotů musí dodržovat všichni výrobci robotů. Roboti jsou již z výroby vybaveny bezpečnostními prvky pro snadnou integraci do pracovního provozu.
Článek vyšel v originále „How to Safely Incorporate Cobots in Industrial Workplaces" na webu DigiKey.com, autorem je Richard A. Quinnell



