Základy Ethernetu pro průmyslovou automatizaci (Ethernet for Control Automation Technology EtherCAT ) sahají až do roku 1980. Dnes je standardizován v normě IEC 61158 a je nepostradatelný v široké škále aplikací průmyslové automatizace.

Obrázek 1: Standardní logo EtherCAT. (Zdroj obrázku: EtherCAT Technology Group )
V polovině 80. let vznikla myšlenka využití Ethernetu pro průmyslovou automatizaci. Výrobci se zkušenostmi s řídicími systémy věděli, že fyzická vrstva Ethernetu nebude pro průmyslové použití problém. V té době viděli problém v protokolu TCP / IP, jelikož jeho výpočetní výkon byl příliš pomalý pro průmyslovou automatizaci. Navíc data na Ethernetu nebyla deterministická. Na druhou stranu došlo k exponenciálnímu nárůstu počtu nainstalovaných uzlů a připojení k síti Ethernet se stalo běžnou záležitostí, čímž se dosáhlo značného zlevnění instalace.
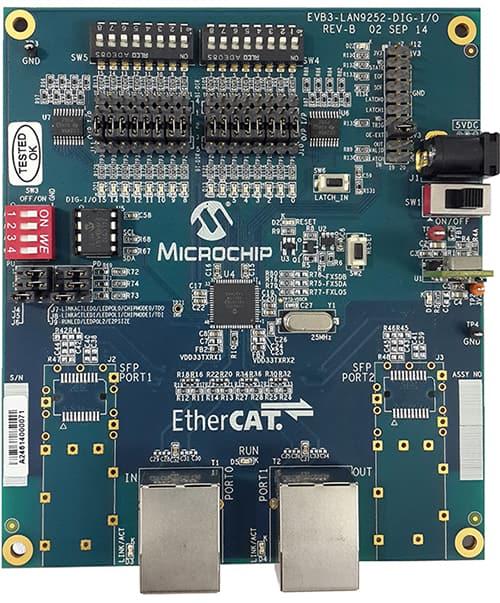
Obrázek 2: Deska LAN9252 DIGIO je hardwarové zařízení EtherCAT, které může samostatně pracovat bez připojeného MCU. Deska umožňuje duální síťová připojení k zásuvkám RJ45 nebo optickým rozhraním pro komunikaci prostřednictvím modulu SFP. Tato deska je dodávána předem nakonfigurovaná a po zapnutí se hostiteli bude jevit jako sekundární EtherCAT. (Zdroj obrázku: Microchip Technology )
Základní prvky EtherCAT
Jedním z prvních vylepšení Ethernetu bylo robustní připojení kabelu RJ45 typu plug-to-blue-cable. Pro použití v průmyslovém prostředí musí být tento konektor pevným a vodotěsným spojem, který je schopen odolat oděru, nárazům a několika cyklům rozpojení. Výrobci kabelů začali tyto konektory nabízet pro řízení průmyslového Ethernetu (IE) na základě standardního protokolu TCP / IP a sedmivrstvého standardu Open Systems Interconnection (OSI), který se používá dodnes.

Obrázek 3: Průmyslové ethernetové kabely zajišťují bezchybný přenos dat díky robustní konstrukci odolné proti oděru, aby se zabránilo nákladným prostojům a udržoval se bezpečný a spolehlivý provoz stroje. (Zdroj obrázku: Getty Images )
Spolehlivé spojení průmyslových měřících karet a řídících systémů mělo za následek zdokonalení procesů v průmyslové automatizaci. Byl to první krok na cestě k většímu využívání Ethernetu v automatizaci pro události, které nebyly časově kritické (pomalé změny hodnot v čase jako je teplota, průtok a vlhkost). Pro tyto aplikace bylo toto řešení dostatečné. Pro automatizaci pomocí průmyslových počítačů to bylo ale nedostatečné. Díky kolizím paketů nebylo možné synchronizovat data pro pokročilejší operace, mezi které patří vysokorychlostní kontrola lahví výrobní linky nebo řízení nožů uvnitř balicího stroje.
Taková automatizace vyžadovala nový přístup a několik výrobců přišlo s různými řešeními, ale jedno z nich svými vlastnostmi vyčnívalo. Jednalo se o EtherCAT, který byl poprvé uveden v roce 2003. Měl (a stále má) jedno z nejrychlejších časování komunikace na bázi Ethernetu, takže se rychle stal preferovanou síťovou a řídicí architekturou pro automatizaci výroby.
Využití EtherCAT (k uspokojení požadavků průmyslové automatizace na rychlost a determinismus) vyžaduje, aby sběrnice byla doplněna rychlým řídicím hardwarem, který se v mnoha případech spoléhá na aplikačně specifické integrované obvody nebo ASIC v rámci ovládacích prvků pracujících s funkcemi EtherCAT.
Základní struktura EtherCAT pro deterministické děje
EtherCAT využívá strukturu ethernetových dat k vytvoření primárního (hlavní kontrolér) a sekundárních uzlů (node) - senzory a akční členy v továrně. Tyto malé levné obvody ASIC jsou umístěny v každém uzlu a zvyšují výkon celé konfigurace.
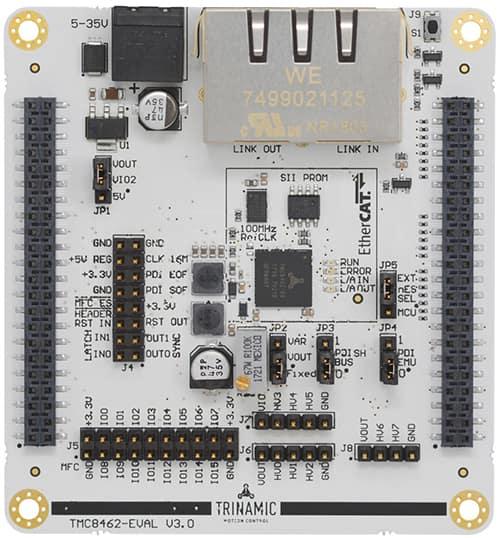
Obrázek 4: Sekundární řadiče TMC8462 EtherCAT se 100 Mb fyzickými vrstvami (PHY) jsou schopné komunikace v reálném čase. JMá integrovaný napájecí zdroj a 24 V vstupy/výstupy I / O. Sekundární řadiče MC8462 se obvykle spárují s watchdogem, PWM a SPI nebo s I2C rozhraním primárních jednotek nebo s externím CPU. (Zdroj obrázku: TRINAMIC Motion Control )
Telegram putující po kruhové topologii EtherCAT začíná u primárního řadiče a prochází všemi uzly. V každém uzlu jsou instrukce připravené ke čtení nebo zápisu dat do příslušných telegramů. Zápis a čtení probíhá, aniž by se telegram zpomalil průchodem uzlu. ASIC každého uzlu organizuje vysokorychlostní výměnu informací a poté se telegram rychle přesměruje do dalšího uzlu.
Jakmile je toto kompletní kolo dokonáno, dojde k aktualizaci dat v hlavním řadiči a další datový paket je odeslán. Tento cyklus je nedílnou součástí struktury EtherCAT, který zabraňuje kolizím a zajišťuje, že data jsou primárnímu kontroléru okamžitě k dispozici na konci každého cyklu. Telegram může uvolnit pouze primární (hlavní kontrolér). Jedná se sice o kruhovou topologii, která ale vykazuje vlastnosti plně duplexního systému.
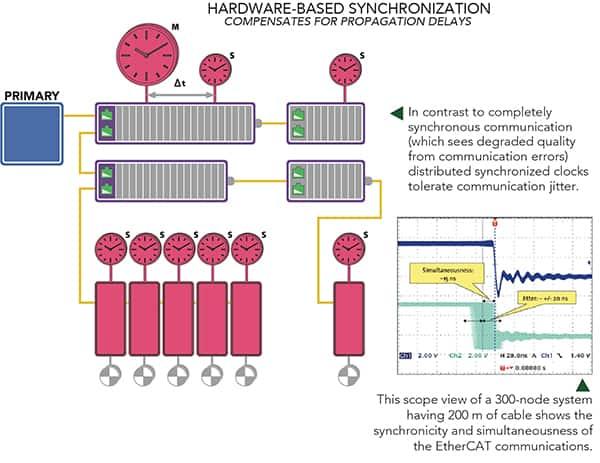
Pro práci s deterministickými daty používá EtherCAT tzv. distribuované hodiny. Primární řadič odešle paket do všech uzlů, které v reakci dvakrát zablokují své vnitřní hodiny. Nejprve při přijetí paketu a poté znovu, když se vrátí paket zpět primárnímu kontroléru.
Taková rutina (kterou lze ve skutečnosti několikrát opakovat) poskytuje přímé měření zpoždění jednotlivého telegramu každého uzlu. Výsledná vypočítaná zpoždění se započítají jako offset hodin. Nakonec primární kontrolér nastaví hodiny pro první uzel v sekvenci jako referenční hodiny pro všechny ostatní uzly na sběrnici.
EtherCAT lze nakonfigurovat tak, aby se toto zpoždění aktualizovalo pravidelně nebo s každým cyklem. Kombinace rychlého datového cyklu a distribuovaných hodin umožňuje celému systému pracovat s jitterem menším než 0,1 ms při datové rychlosti 100 Mbit / s. To je dostatečné pro většinu průmyslových úkolů.
Obrázek 5: Klíčem k vysoce výkonnému řízení automatizovaných strojů je minimální doba odezvy spolu s deterministickým přístupem. Nezáleží na tom, kdy přesně dojde ke komunikaci a výpočtům - pokud jsou ve výstupní komponentě k dispozici výsledky před další požadovanou akcí. (Zdroj obrázku: EtherCAT Technology Group)
EtherCAT má také další integrované funkce pro správu času. Některé senzory, akční členy a systémy jsou závislé na řízení v reálném čase. Jedná se o servomotory, bezpečnostní zařízení nebo výtahy. Systémy EtherCAT lze nastavit tak, aby podporovaly tyto komponenty a systémy tím, že umožňují natavení primárního kontroléru tak, aby upřednostňovaly tyto kritická zařízení. Ostatní komponenty s menší prioritou pak získají méně datových požadavků a aktualizací, zatímco kritické komponenty získají častější žádosti o data a aktualizace.
Časová osa významných funkcí EtherCAT
Základy EtherCAT vznikly ve společnosti Beckhoff Automation Lightbus (v roce 1989) a posléze díky společnosti Fast Lightbus využívající ethernetové kabely v roce 2003. V roce 2005 byla zveřejněna specifikace EtherCAT a v roce 2007 byla tato specifikace proměněna do standardu IEC 61158. Beckhoff a další výrobci rychle vyvinuli fyzický hardware a software, aby využili schopnosti EtherCAT při zachování zpětné kompatibility.
Správa standardu EtherCAT je pod skupinou EtherCAT Technology Group (ETG). Jedná se o skupinu OEM výrobců a koncových uživatelů, kteří mezi sebou sdílejí vývoj a zajišťují interoperabilitu zařízení s EtherCAT. Tato skupina mimo jiné vyvinula tester kompatibility s názvem Conformance Test Tool (CTT) pro ověřování, zda nově vyvinutá zařízení splňují standardy interoperability. Přijetí EtherCAT řadou průmyslových odvětví se projevilo v jeho neustálé inovaci.
2008: Distribuované hodiny s XFC
Distribuovaného časování, která je základem pro provoz komunikace EtherCAT, byla popsána v předchozí části tohoto článku. Je však třeba dodat, že distribuované hodiny EtherCAT jsou součástí technologie Beckhoff eXtreme Fast Control (XFC), která vyžaduje, aby všechna zařízení EtherCAT měla své vlastní hodiny, které se nepřetržitě synchronizují se všemi ostatními hodinami v systému EtherCAT. EtherCAT kompenzuje odchylku mezi jednotlivými hodinami pod 100 ns. Data s časovým razítkem se používají ke zvýšení přesnosti časování konkrétního ovládacího parametru v rámci jednoho telegramu.
Hodiny distribuovaného systému zajišťují, že jsou všechny hodiny systému synchronizovány do méně než 100 ns a načasování řídicí události je obvykle omezeno dobou cyklu. XFC umožňuje využít data s časovou značkou pro rychlé a vysoce přesné ovládání, a to při vzorkovací frekvenci dat 200 kHz(minimální datový šum).

Obrázek 6: Tato brána umožňuje připojení sériových komponent RS-232/422/485 k řídicím systémům EtherCAT. Nazývá se Anybus Communicator a provádí konverzi protokolu k odesílání sériových dat do primárního PLC nebo řídicí jednotky jako jednoduchá I / O data. (Zdroj obrázku: HMS Connecting Devices )
2010: Různá vývojová softwarová prostředí EtherCAT
Rozšíření EtherCAT dalo podnět pro vznik software s podpůrnými moduly pro usnadnění integrace funkcí pro specifické aplikace průmyslové automatizace. První z těchto modulů byl zaměřen na průmysl obráběcích strojů a na řízení PLC, NC, CNC a robotiku. Dnes je software pro EtherCAT více kompatibilní se standardem IEC 61131-3 a také lze v něm naprogramovat určité rutiny v jazyce C / C ++, Visual Studio, MATLAB nebo Simulink. To umožňuje budování, simulaci a optimalizaci řídicích systémů ještě před samou implementací.
2011: Kabely EtherCAT pro zjednodušení napájení a dat do servomotorů
Celá léta si integrátoři pohybových systémů stěžovali na to, jak servomotory vyžadovaly mnoho kabelů, pro ovládání elektromotoru, pro napájení a pro zpětnou vazbu. Použití jediného kabelu pro přenos energie a různých typů řídících signálů na různých úrovních napětí může způsobit šum signálu, posuny úrovně a přeslechy. Ale asi před 10 lety začali dodavatelé pohybových komponentů (s pečlivou pozorností na opláštění kabelů, stínění, zmírnění kapacity a velikosti vodičů i uspořádání) uvádět na trh kabelová řešení EtherCAT s jedním kabelem (napájení a data). Dnes jsou tyto kabely běžnou součástí provozu a typickou ukázkou je kabel EtherCAT P.
2014 až 2017: Podpora víceosých systémů a systémů se strojovým vidění
V těchto letech software EtherCAT umožňuje konfigurovat hardware pro víceosé instalace s celou řadou integrovaných bezpečnostních funkcí (jako je STO, SOS, SS1, SS2). Tyto funkce jsou důležitou součástí v robotickém provozu, který vyžaduje flexibilní a modulární nasazení. V těchto letech také došlo k větší podpoře strojového vidění v reálném čase založeného na EtherCAT. Některý software dokonce umožňuje přímou integraci úkolů strojového vidění do strojů.
2018: Rychlejší verze EtherCAT se zpětnou kompatibilitou
EtherCAT G (s rychlostí 1 Gb / s) a EtherCAT G10 (s rychlostmi až do 10 Gb / s) jsou doplněny o výkonnější ovladače a zároveň umožňují využití původních struktur EtherCAT. Některá zařízení mohou mít problémy s dobou cyklu. To se dá vyřešit pomocí tzv. řadiče větví (uzly připojení), které se postarají o smyčky s rychlostí 1 Gb / s i smyčky s rychlostí 100 Mb / s.
Od roku 2018: Více hardware a software s EtherCAT a podpora IoT
Poslední roky urychlily zavedení průmyslových komponent a integrovaných systémů v síti EtherCAT. Software s moduly strojového učení využívají cloudové služby. To znamená, že koncoví uživatelé, kteří vlastní nebo používají stroje v síti EtherCAT, mohou nyní jednoduše vyměňovat zdrojový kód, provádět simulaci systému, a dokonce využívat informace o jednotlivých strojích pro podrobnější analýzu. To je zvláště užitečné pro společnosti provozující stroje v geograficky oddělených výrobních závodech. V polovině srpna 2020 bylo skupinou EtherCAT Technology Group vydáno přes 3 000 ID pro jednotlivé členy.
Závěr
Před téměř 40 lety začal průmysl hledat způsoby, jak využít všudypřítomnost a sílu Ethernetu pro průmyslovou komunikaci. EtherCAT nabízí nejlepší poměr výkonu a nákladů, ze všech sběrnic běžících na Ethernetu. Díky podpoře Industry 4.0 a IIoT zůstal EtherCAT nepostradatelný pro budoucí průmyslovou automatizaci.
Článek vyšel v originále na webu DigiKey.com, autorem je Scott Orlosky a Lisa Eitel



