Zkratka SYSMAC vychází z anglického "System for Machine Automation Control", tedy "Systém řízení pro automatizaci strojů". Jde tedy o platformu pro automatizaci strojů pro celkovou integraci řízení od řídicí jednotky po software.
Základní popis platformy Sysmac
 Automatizační platforma Sysmac byla primárně vyvinuta jako systém pro centralizované samostatné řídicí jednotky pro celý stroj nebo výrobní buňku umožňující získávání informací z velkého množství snímačů, ovládání velkého množství akčních členů, sledování a správu RFID údajů s napojením na SQL databázi, vizuální kontrolu prostřednictvím kamer a hlavně velmi rychlé řízení pohybu se 4 až 64 osami. Například dle údajů výrobce lze v aplikace s řízením až 32 os dosáhnout doby cyklu programu kratší než 0,5 ms. Navíc s některými řídicími jednotkami je možné přímo řídit až osm tzv. SCARA robotů Omron řady Delta, stejně jako ostatní servopohony a zařízení spojená s projektem.
Automatizační platforma Sysmac byla primárně vyvinuta jako systém pro centralizované samostatné řídicí jednotky pro celý stroj nebo výrobní buňku umožňující získávání informací z velkého množství snímačů, ovládání velkého množství akčních členů, sledování a správu RFID údajů s napojením na SQL databázi, vizuální kontrolu prostřednictvím kamer a hlavně velmi rychlé řízení pohybu se 4 až 64 osami. Například dle údajů výrobce lze v aplikace s řízením až 32 os dosáhnout doby cyklu programu kratší než 0,5 ms. Navíc s některými řídicími jednotkami je možné přímo řídit až osm tzv. SCARA robotů Omron řady Delta, stejně jako ostatní servopohony a zařízení spojená s projektem.
 Platforma Sysmac je tedy primárně určena pro strojní průmyslová zařízení vyznačující se značným množstvím automatického řízení mechanického pohybu, jako různá automatická skládací, paletizační, přesunovací, obráběcí, svářecí, třídicí a další podobná pracoviště, vyžadující současně sledování pohybu dílů, produktů a materiálu, měření rozměrů, RFID i optické identifikace, sekvenční ovládání elektrických a i elektropneumatických akčních členů a pohonů, případně i celých robotů a současně komunikovat s počítačovými databázemi, třeba skladovými, či výrobními. Jedná se tedy o aplikace, kde je vyžadován současně vysoký výpočetní výkon, ale i schopnost pracovat v reálném čase. Jde tedy o takovou kombinaci velmi výkonného PLC a průmyslového PC.
Platforma Sysmac je tedy primárně určena pro strojní průmyslová zařízení vyznačující se značným množstvím automatického řízení mechanického pohybu, jako různá automatická skládací, paletizační, přesunovací, obráběcí, svářecí, třídicí a další podobná pracoviště, vyžadující současně sledování pohybu dílů, produktů a materiálu, měření rozměrů, RFID i optické identifikace, sekvenční ovládání elektrických a i elektropneumatických akčních členů a pohonů, případně i celých robotů a současně komunikovat s počítačovými databázemi, třeba skladovými, či výrobními. Jedná se tedy o aplikace, kde je vyžadován současně vysoký výpočetní výkon, ale i schopnost pracovat v reálném čase. Jde tedy o takovou kombinaci velmi výkonného PLC a průmyslového PC.
Tomu pak odpovídá i konkrétní hardwarové provedení, kde jednotlivé konkrétní řídicí jednotky Sysmac jsou v praxi svojí konfigurací velmi podobné PLC, protože také jde o modulární konfigurovatelné systémy pro upevnění na DIN lištu, které jsou tvořeny hlavně CPU modulem následně doplněným o různé moduly vstupů, výstupů a komunikačních rozhraní podle potřeby aplikace.
 CPU moduly pro Sysmac nesoucí označení NJ jsou osazené "běžným" počítačovým procesorem Intel Atom, narozdíl od méně pružné PLC architektury založené na specializovaném systému ASIC. Zde je rozšiřitelná architektura místo kolem hardwaru soustředěná kolem specializovaného RTOS operačního softwaru, běžícím v reálném čase. Vývoj PLC automatů založených na tradičním systému ASIC trvá dlouho a není snadné jej rychle změnit. Naopak systém založený na běžném procesoru s RTOS operačním softwarem lze z pohledu výrobce konfigurací softwaru snadno upravovat a tím rychleji reagovat na požadavky trhu.
CPU moduly pro Sysmac nesoucí označení NJ jsou osazené "běžným" počítačovým procesorem Intel Atom, narozdíl od méně pružné PLC architektury založené na specializovaném systému ASIC. Zde je rozšiřitelná architektura místo kolem hardwaru soustředěná kolem specializovaného RTOS operačního softwaru, běžícím v reálném čase. Vývoj PLC automatů založených na tradičním systému ASIC trvá dlouho a není snadné jej rychle změnit. Naopak systém založený na běžném procesoru s RTOS operačním softwarem lze z pohledu výrobce konfigurací softwaru snadno upravovat a tím rychleji reagovat na požadavky trhu.
Pro řídící účely dostatečně výkonný Intel procesor Atom umožňuje díky své univerzální architektuře integrovat do jedné řídicí jednotky pokročilé řízení pohybu s osvědčenými logickými operacemi stroje. Handshaking a další přechodné kroky, jež jsou třeba u více modulárních a více jednotkových systémů, vedou k dodatečným režijním nákladům, neefektivitě a zpoždění, které zde jsou tak odstraněny.
 Zde je jeden program pro pohyb i logické operace, jeden software pro pohyb, pohony a kamery navrhovaný ve shodném prostředí plně v souladu s otevřenou normou IEC 61131-3. K dispozici je komplexní sada pohybových a logických funkcí. Tím dochází ke zvýšení funkčnosti a výkonu. Sekvenční řízení, řízení pohybu a aktualizace rozhraní I/O se všechny provádějí ve stejné řídicí periodě. To umožňuje přesné sekvenční řízení a řízení pohybu v pevné periodě s minimální odchylkou.
Zde je jeden program pro pohyb i logické operace, jeden software pro pohyb, pohony a kamery navrhovaný ve shodném prostředí plně v souladu s otevřenou normou IEC 61131-3. K dispozici je komplexní sada pohybových a logických funkcí. Tím dochází ke zvýšení funkčnosti a výkonu. Sekvenční řízení, řízení pohybu a aktualizace rozhraní I/O se všechny provádějí ve stejné řídicí periodě. To umožňuje přesné sekvenční řízení a řízení pohybu v pevné periodě s minimální odchylkou.
Protože společnost Omron přímo sama vyvinula každou stránku řídicího jádra RTOS, je doba provozu předvídatelná a spolehlivá a nedochází k nestabilitě v důsledku kolizí s částmi kódu dodaného jiným výrobcem. Díky tomuto faktu lze funkce řady NJ i při vývoji a simulaci předvídat s vysokou přesností, odpovídající reálnému provozu. Funkce, jako jsou například simulace profilu CAM, poskytují nejen údaje o poloze, ale rovněž o rychlosti, zrychlení a trhavém pohybu, umožňují přesně předpovědět, jak bude ve skutečnosti probíhat pohyb stroje.

Komunikační rozhraní
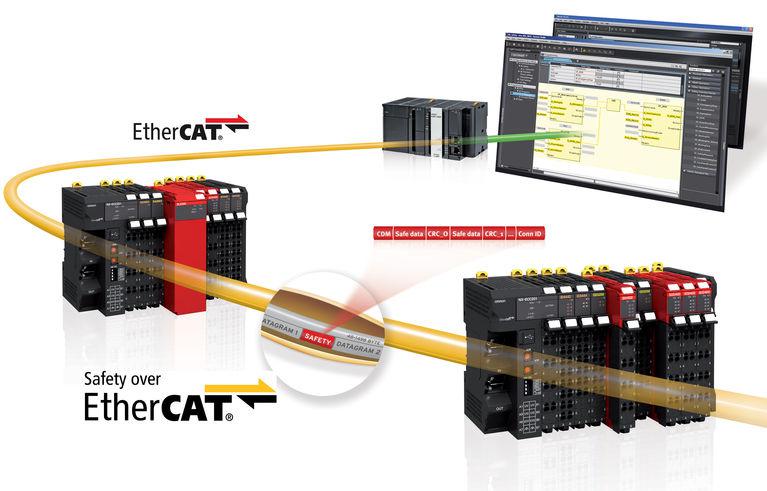
 Jako hlavní komunikační "páteř" systému byla zvolena průmyslová řídící komunikační sběrnice EtherCAT, která je obecně uznávána jako aktuálně nejrychlejší síť pro potřeby řízení strojů, pro čtení a ovládání i vzdálených klasických i bezpečnostních vstupů/výstupů a komunikaci s kamerovými systémy. Je to jedna z průmyslových verzí Ethernetu, která vyhovuje rámci IEEE 802.3 a využívá standardní ethernetové kabely a konektory, ale současně poskytuje krátkou dobu aktualizace 100 μs a chvění méně než 1 μs, vysokou přesnost synchronizace všech zařízení v síti pro řízení strojů díky využití distribuovaného mechanismu hodin, jednoduché nastavení pomocí automatického přiřazování adres uzlům, podporuje až 192 podřízených zařízení. Navíc komunikaci EtherCAT již využívají pro řízení a komunikaci nejen v sortimentu společnosti Omron, ale i jiných výrobců různé servopohony (např. Omron řady G5), měniče, kamerové snímače (například Omron řady FQ-M), distribuovaná rozhraní I/O (například Omron řady NX) apod.
Jako hlavní komunikační "páteř" systému byla zvolena průmyslová řídící komunikační sběrnice EtherCAT, která je obecně uznávána jako aktuálně nejrychlejší síť pro potřeby řízení strojů, pro čtení a ovládání i vzdálených klasických i bezpečnostních vstupů/výstupů a komunikaci s kamerovými systémy. Je to jedna z průmyslových verzí Ethernetu, která vyhovuje rámci IEEE 802.3 a využívá standardní ethernetové kabely a konektory, ale současně poskytuje krátkou dobu aktualizace 100 μs a chvění méně než 1 μs, vysokou přesnost synchronizace všech zařízení v síti pro řízení strojů díky využití distribuovaného mechanismu hodin, jednoduché nastavení pomocí automatického přiřazování adres uzlům, podporuje až 192 podřízených zařízení. Navíc komunikaci EtherCAT již využívají pro řízení a komunikaci nejen v sortimentu společnosti Omron, ale i jiných výrobců různé servopohony (např. Omron řady G5), měniče, kamerové snímače (například Omron řady FQ-M), distribuovaná rozhraní I/O (například Omron řady NX) apod.
Pro komunikaci s nadřazenými systémy či zařízeními nepodporující EtherCAT, například softwarem Omron řady NS HMI nebo různými SCADA systémy, je pak podporována ještě "klasická" průmyslová verze ethernetu EtherNet/IP, plně kompatibilní s "běžným kancelářským ethernetem", která je dnes již podporována většinou zařízení a strojů mající ethernetové rozhraní.
Vše pak doplňuje USB rozhraní pro standardní připojení a komunikaci s lokálním PC. Slot pro paměťovou kartu SD integrovaný v procesoru zase zajišťuje společné médium pro ukládání dat.
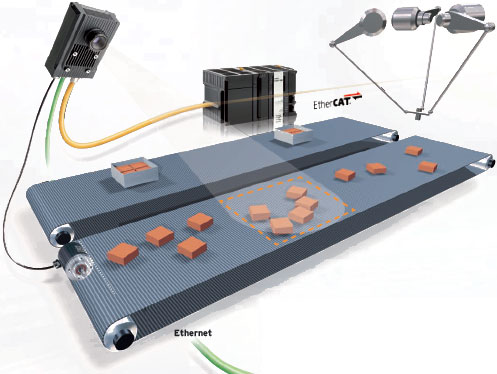
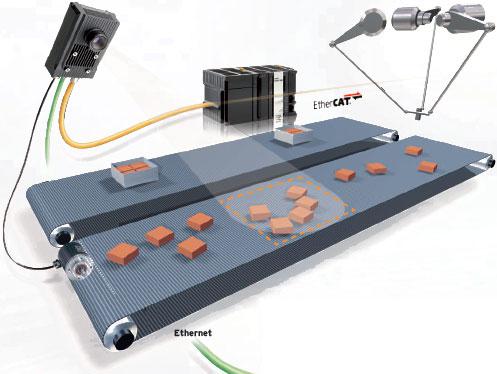
Princip EtherCAT průmyslové komunikace řídícího systému Sysmac NJ s podřízenými připojenými zařízeními (snímače, pohony, ventily atd.).
Přímá podpora databází SQL
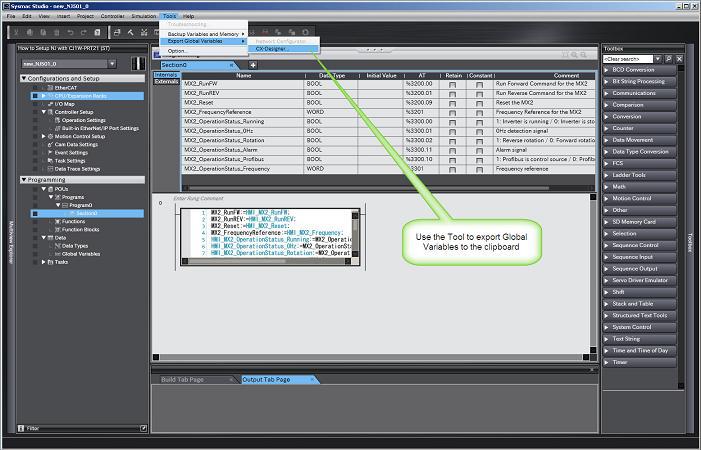
 Funkce připojení databáze (DB Connection) umožňuje NJ jednotce přímý přístup k databázi na serveru připojenému k vestavěnému EtherNet/IP portu. Jsou přitom podporovány databáze Oracle Database společnosti Oracle Corporation a SQL Server společnosti Microsoft Corporation. Pro práci tak není požadován žádný doplňkový software, hardware ani Server Middleware. Jediná jednotka CPU řady NJ má přístup až ke třem databázím až na třech serverech a pro potřeby vkládání, aktualizace a výběru do/z relační databáze jsou podprovány služby "DB Connection". Dále je k dispozici protokol zvláštních instrukcí a zpracování na kartu SD. Systém Fail-Safe slouží proti chybám při výměně dat či výpadku napájení, protože data lze přemístit do energeticky nezávislé paměti.
Funkce připojení databáze (DB Connection) umožňuje NJ jednotce přímý přístup k databázi na serveru připojenému k vestavěnému EtherNet/IP portu. Jsou přitom podporovány databáze Oracle Database společnosti Oracle Corporation a SQL Server společnosti Microsoft Corporation. Pro práci tak není požadován žádný doplňkový software, hardware ani Server Middleware. Jediná jednotka CPU řady NJ má přístup až ke třem databázím až na třech serverech a pro potřeby vkládání, aktualizace a výběru do/z relační databáze jsou podprovány služby "DB Connection". Dále je k dispozici protokol zvláštních instrukcí a zpracování na kartu SD. Systém Fail-Safe slouží proti chybám při výměně dat či výpadku napájení, protože data lze přemístit do energeticky nezávislé paměti.
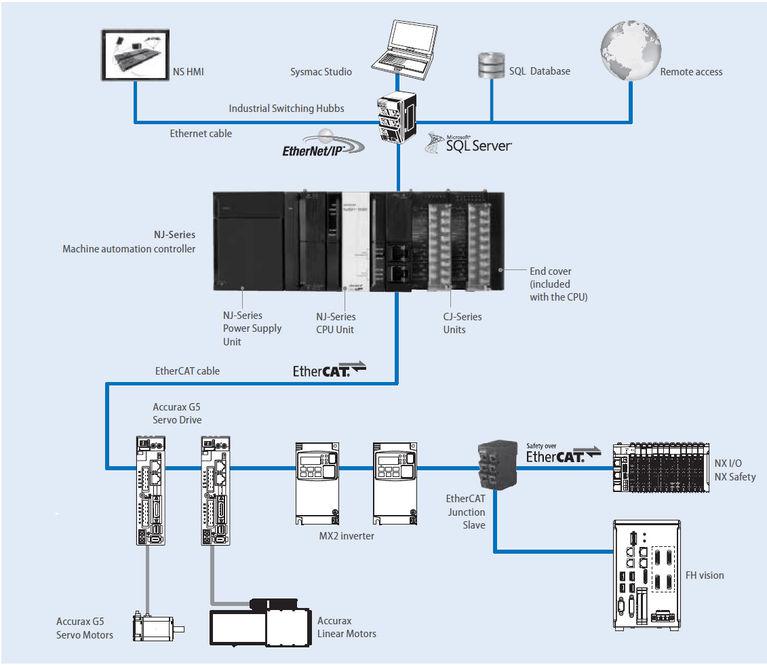
Příklad celkových komunikačních možností řídícího systému Omron Sysmac s EtherCAT komunikací s podřízenými slave zařízeními na straně jedné a Ethernetovou komunikací s nadřazeným systémem s SQL databází na straně druhé.
Připojovací vstupy a výstupy
 U tak výkonných řídících platforem založených na operačním systému RTOS, se obvykle počítá s použitím jednotek vzdálených vstupů a výstupů, které jsou napojeny do systému prostřednictvím průmyslové sběrnice, v tomto případě tedy EtherCAT. Ideální v tomto směru je Sysmac NJ jednotky jsou firemní Omron vzdálené IO jednotky řady NX, které právě obsahují na komunikační straně rozhraní EtherCAT a na připojovací straně široký sortiment úzkých modulů binární i analogových vstupů, spínaných i analogových výstupů, vstupů pro senzory teploty a rychlých čítacích vstupů pro lineární i rotační inkrementální enkodéry apod.
U tak výkonných řídících platforem založených na operačním systému RTOS, se obvykle počítá s použitím jednotek vzdálených vstupů a výstupů, které jsou napojeny do systému prostřednictvím průmyslové sběrnice, v tomto případě tedy EtherCAT. Ideální v tomto směru je Sysmac NJ jednotky jsou firemní Omron vzdálené IO jednotky řady NX, které právě obsahují na komunikační straně rozhraní EtherCAT a na připojovací straně široký sortiment úzkých modulů binární i analogových vstupů, spínaných i analogových výstupů, vstupů pro senzory teploty a rychlých čítacích vstupů pro lineární i rotační inkrementální enkodéry apod.
Nicméně je možné k řídící NJ jednotce přímo lokálně připojit většinu IO jednotek (vstupů/výstupů) typu CJ (pro PLC Omron) díky zpětné kompatibilitě. Lze tak využít celé řady prověřených stávajících typů I/O jednotek.
Řízení robotů s Sysmac NJ
 Kromě standardních funkcí NJ poskytuje robotická jednotka CPU sadu konkrétních funkčních bloků k ovládání více strojů s roboty Delta. Konkrétně řízení až 8 robotů Delta s cyklem 2 ms nebo 4 robotů Delta s cyklem 1 ms. Systém umožňuje definovat kinematické parametry pro řízení jakéhokoli druhu SCARA robotů Delta, s rotační osou nebo bez ní. Můžete dokonce vytvořit vyhrazený uživatelský souřadnicový systém, který zjednoduší programování. Výkon trajektorií podávání i všechny související synchronizace s dopravníky lze optimalizovat díky chytrým příkazům pro řízení pohybu založeným na čase, které byly vyvinuty přímo pro nejširší potřeby propustnosti a automatickou kontrolu pracovního prostoru.
Kromě standardních funkcí NJ poskytuje robotická jednotka CPU sadu konkrétních funkčních bloků k ovládání více strojů s roboty Delta. Konkrétně řízení až 8 robotů Delta s cyklem 2 ms nebo 4 robotů Delta s cyklem 1 ms. Systém umožňuje definovat kinematické parametry pro řízení jakéhokoli druhu SCARA robotů Delta, s rotační osou nebo bez ní. Můžete dokonce vytvořit vyhrazený uživatelský souřadnicový systém, který zjednoduší programování. Výkon trajektorií podávání i všechny související synchronizace s dopravníky lze optimalizovat díky chytrým příkazům pro řízení pohybu založeným na čase, které byly vyvinuty přímo pro nejširší potřeby propustnosti a automatickou kontrolu pracovního prostoru.
Řadič robotiky NJ tvoří jádro architektury systému, který prostřednictvím sběrnice EtherCAT zajišťuje nejvyšší výkon při řízení pohybu v náročných aplikacích balení. Řadič poskytuje nezávislé nebo synchronizované pohyby s ostatními zařízeními pro řízení pohybu nainstalovanými ve stroji, například servo pracující v jedné ose nebo ve skupině os. Integrace řadiče robotiky NJ se servosystémy G5 umožňuje dosáhnout maximální propustnosti v aplikacích podavačů, protože využijete všech výhod poskytovaných kinematickou strukturou robotů Delta. Synchronizace s několika dopravníky může být realizována velmi snadno pomocí určitých příkazů, které byly speciálně vyvinuty k optimalizaci doby cyklu aplikací podavačů, které využívají robotů Delta.
Programování = Software SYSMAC Studio
 Integrované vývojové prostředí Sysmac Studio bylo vyvinuté jako jeden software pro řízení a konfiguraci celého stroje prostřednictvím jediného připojení. V jednom softwaru rozhraní integruje konfiguraci, programování a monitorování. Softwarový balík obsahuje také další nástroje pro návrh HMI a rozšíření konfigurace informační sítě.
Integrované vývojové prostředí Sysmac Studio bylo vyvinuté jako jeden software pro řízení a konfiguraci celého stroje prostřednictvím jediného připojení. V jednom softwaru rozhraní integruje konfiguraci, programování a monitorování. Softwarový balík obsahuje také další nástroje pro návrh HMI a rozšíření konfigurace informační sítě.
 Jedním softwarem tak současně lze programovat a konfigurovat Omron zařízení:
Jedním softwarem tak současně lze programovat a konfigurovat Omron zařízení:
- Řídicí jednotky řady NJ
- HMI řady NA
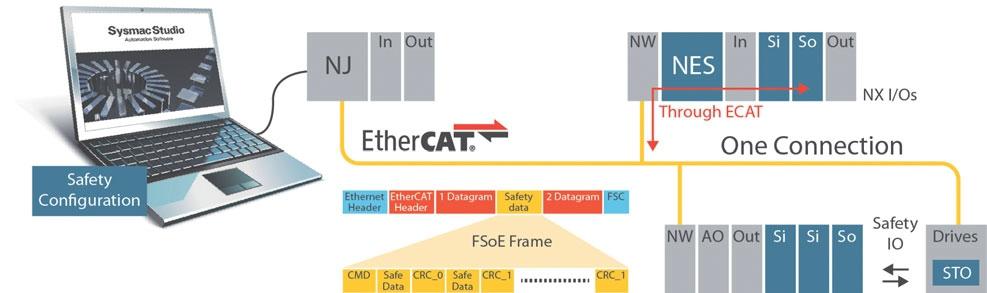
- Bezpečnostní systém NX a NX-I/O
- Servosystém řady G5
- Frekvenční měniče řady MX2 a RX
- Kamerový systém a senzor FH a FQM
- Komponenty sítě GX
- Senzory E3 N-Smart
- Měřicí senzory řady ZW
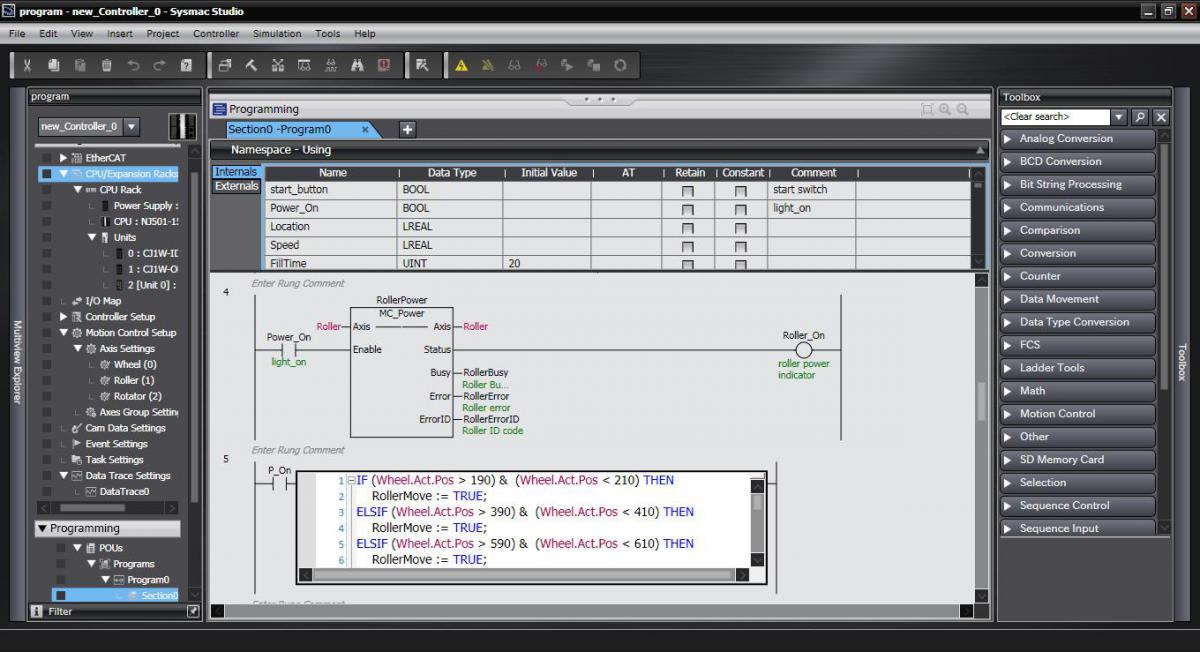 Sysmac Studio vyhovuje otevřené normě IEC 61131-3, k dispozici jsou také instrukce řízení pohybu vycházející z norem PLCopen a sady instrukcí (POU) odpovídající pravidlům IEC. Programovací prostředí je založené na diagramu kontaktních schémat, programovacích jazycích ve strukturovaném textu a programových organizačních jednotkách, které zahrnují programy, funkce a funkční bloky s komplexní sadou instrukcí. Součástí jsou také instrukce řízení pohybu vycházející z norem PLCopen a sada instrukcí podle pravidel IEC. Například jsou k dispozici i funkce lineární a kruhová interpolace. Grafický editor CAM umožňuje snadný vývoj a programování složitých profilů pohybu.
Sysmac Studio vyhovuje otevřené normě IEC 61131-3, k dispozici jsou také instrukce řízení pohybu vycházející z norem PLCopen a sady instrukcí (POU) odpovídající pravidlům IEC. Programovací prostředí je založené na diagramu kontaktních schémat, programovacích jazycích ve strukturovaném textu a programových organizačních jednotkách, které zahrnují programy, funkce a funkční bloky s komplexní sadou instrukcí. Součástí jsou také instrukce řízení pohybu vycházející z norem PLCopen a sada instrukcí podle pravidel IEC. Například jsou k dispozici i funkce lineární a kruhová interpolace. Grafický editor CAM umožňuje snadný vývoj a programování složitých profilů pohybu.
 Programování pomocí proměnných nevyžaduje učit mapu interní paměti řídicí jednotky, protože Sysmac Studio automaticky přiřadí paměť jednotce procesoru k proměnným, které se vytvoří. To přispívá k rychlejšímu vývoji a snížení výskytu chyb. Rovněž není třeba se zahájením vývoje softwaru čekat na definice adres paměti pro hardware. Hardware a software lze navrhnout samostatně a vyvíjet paralelně.
Programování pomocí proměnných nevyžaduje učit mapu interní paměti řídicí jednotky, protože Sysmac Studio automaticky přiřadí paměť jednotce procesoru k proměnným, které se vytvoří. To přispívá k rychlejšímu vývoji a snížení výskytu chyb. Rovněž není třeba se zahájením vývoje softwaru čekat na definice adres paměti pro hardware. Hardware a software lze navrhnout samostatně a vyvíjet paralelně.
Sysmac Studio poskytuje funkce pro ladění sekvenčního řízení, jako jsou například změny aktuálních hodnot a změny programování online, funkce ladění se simulacemi řízení pohybu se zobrazením výsledků ve 2D nebo 3D a zobrazení stop na virtuálních zařízeních. 3D simulační nástroj umožňuje zobrazit fyzický pohyb a sekvenci stroje, která je přímým důsledkem kódu a konfigurace, pro něž se rozhodl. Pro přesné simulace řízení pohybu jsou k dispozici instrukce vytvoření virtuálních externích signálů, jako je například pozitivní nebo negativní koncový spínač, signál přiblížení domovské polohy, externí bistabilní obvod a vstupní signály dočasného zastavení. Funkce trasování dat zobrazuje graf v podobě časové tabulky paralelně se značkami 2D nebo 3D a výsledky simulace se zaznamenávají do souboru trasování dat. Kombinace 3D simulace pohybu s emulátorem procesoru nabízí programátorovi nástroje k vyhodnocení správné sekvence, optimálního řízení cesty, minimální doby provedení a dalších velmi důležitých operací.

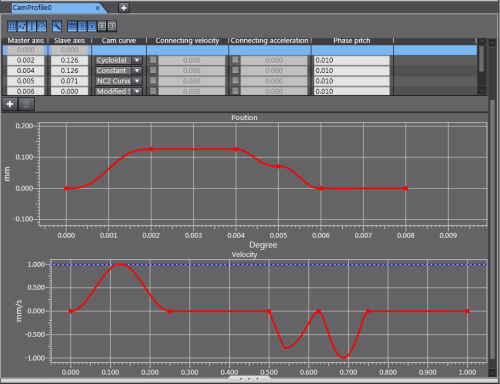
Sysmac Studio poskytuje simulace pohybu a grafický editor CAM pro snadný vývoj a programování složitých profilů pohybu.
Funkce správy úloh slouží k přiřazení podmínky provádění a pořadí provádění řadě procesů, jako je například aktualizace rozhraní I/O a provádění uživatelského programu. Tato úroveň řízení umožňuje zvolit způsob fungování procesoru během doby provozu, aby byl zaručen důsledně rychlý provoz po celou dobu životnosti stroje.
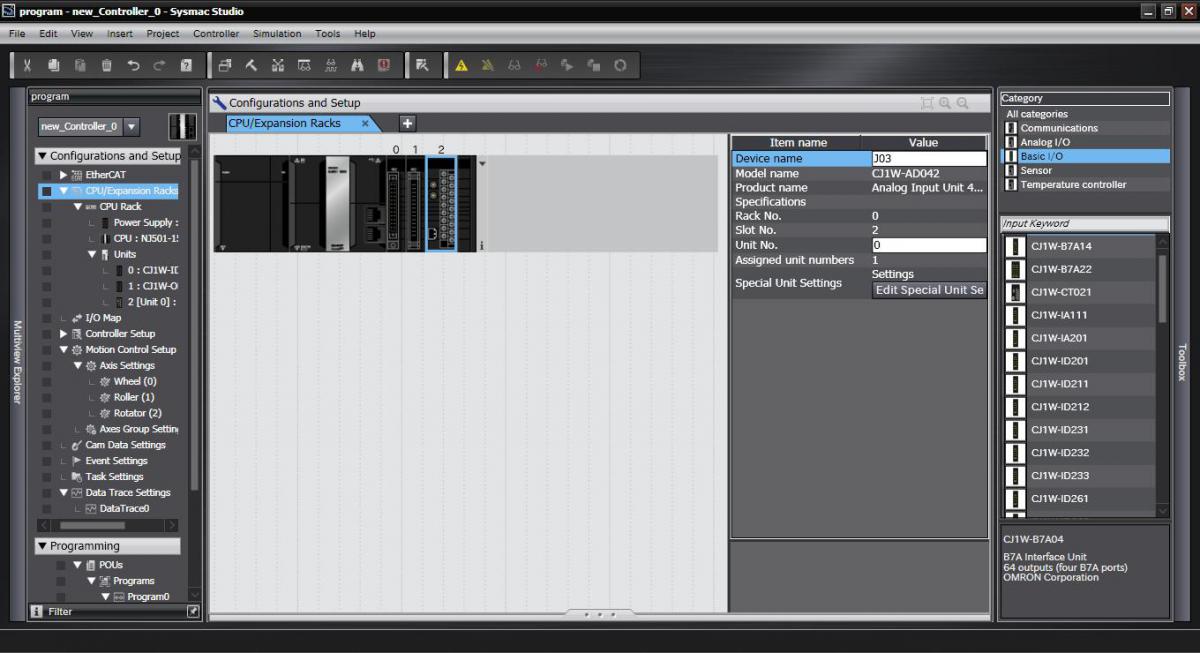

Správa systému umožňuje grafické sestavení, nastavení hardwaru řídící jednotky i zprovoznění EtherCAT komunikace s podřízenými jednotkami, snímači a pohony.
Závěr
Systém Omron Sysmac s řídícími jednotkami NJ představuje řídící prostředek vyšší úrovně, než jsou běžné PLC programovatelné automaty. Není je jejich přímým konkurentem, ale představuje větší výpočetní, řídící i komunikační výkon pro robotické aplikace využívající mnoho-osé řízení pohybu, kamerové snímání a vyhodnocení pracovního prostoru, centrální řízení a vizualizaci složitých průmyslových výrobních linek s mnoha dopravníky a snímači se současnou přímou komunikací, získáváním a ukládáním dat do SQL databází přes ethernet.
Odkazy:
- České zastoupení společnosti OMRON: http://www.omron.cz
- Přímý odkaz na stránky výrobce o platformě Sysmac NJ: http://industrial.omron.cz/cs/products/catalogue/automation_systems/machine_automation_controllers/nj_series/default.html



